4
ОС
Изобретение относится к швейной трасли и может быть использовано устройствах для манипулирования еталями швейных изделий.
Цель изобретения - расширение ехнологических возможностей маниулятора за счет обеспечения обраотки деталей швейных изделий в завате на швейном полуавтомате и захвата деталей любой конфигурации с авномерным натяжением деталей в поле обработки.
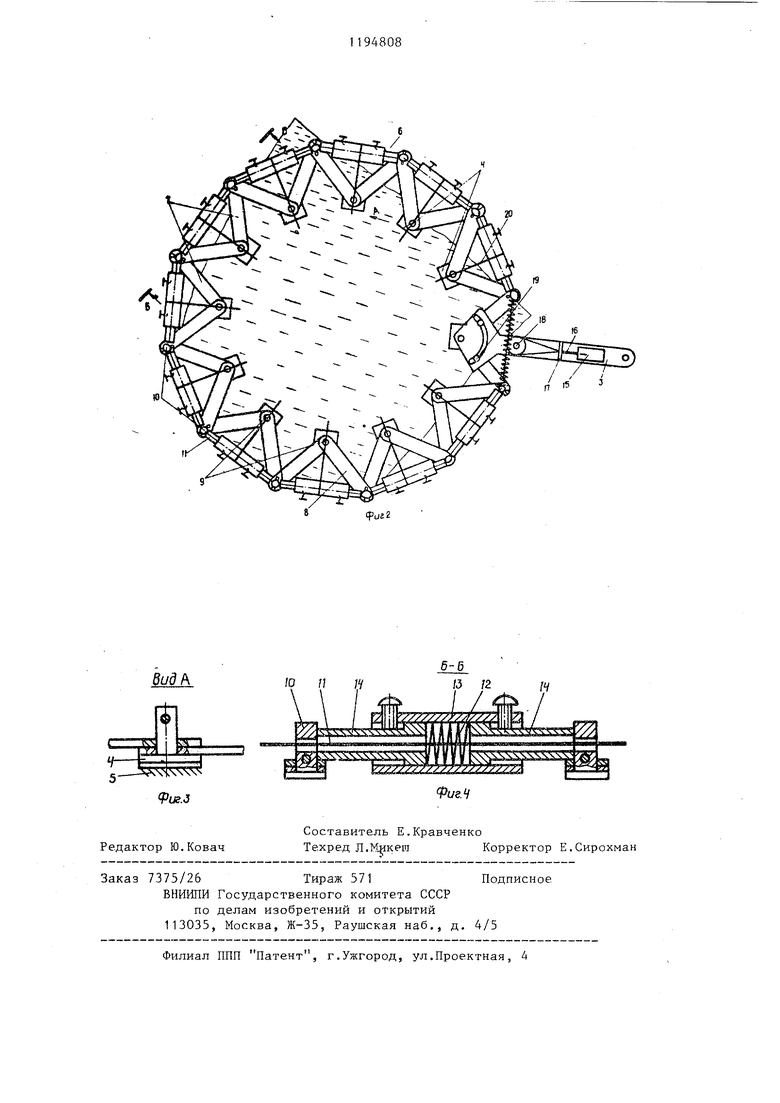
На фиг. 1 изображен робототехноогический комплекс с использованием предлагаемого захвата, общий вид; на фиг. 2 - схема захвата; на фиг.Звид по стрелке А на фиг. 2; на иг. 4 - сечение Б-Б на фиг. 2.
Захват 1 манипулятора 2 содержит держатель 3, посредством которого захват 1 установлен на манипуляторе, захватные пластины 4, покрытые кардолентой 5, и установленный на держателе 3 механизм 6 раздвижения пластин, выполненный в виде шарнирного многозвенника 7, звенья 8 которого расположены по окружности в горизонтальной плоскости и соединены посредством шарниров 9 и 10. При этом в шарнирах 9 закреплены пластины 4, а через отверстия в шарнирах 10 проходит трос 11, на котором шарнирами 10 смонтированы упругие элементы-пружины 12, натягивающие трос 11 и в результате этого обеспечивающие жесткость конструкции захвата. Пружины 12 установлены во втулках 13 и воздействуют на шарниры 10 посредством штоков 14. Кроме того, захват 1 имеет средство для стягивания троса, представляющее собой установленный на держателе 3 электромагнит 15 с сердечником 16, снабженным ограничителем 17 хода, и направляющий двойной шкив 18, при этом сердечник 16 соединен с концами троса 11. Указанное средство установлено на держателе 3 посредством шарниров 19.
1
Для предотвращения поворота пластин 4 с кардолентами 5 (при вращении звеньев 8) на втулках 13 установлены с возможностью скольжения в отверстиях шарниров 10 направляющие стержни 20.
Захват работает следующим образом.
В систему 21 управления вводят программы работ манипулятора 2 и электромагнита 15. При опускании захвата 1 на верхнюю деталь пачки,
уложенной на столе 22 (фиг. 1), срабатывает согласно программе системы 21 управления, электромагнит 15 (фиг. 2). Длина троса 11 в пределах многозвенника 7 уменьшается, шарниры 10 сближаются, вследствие чего пластины 4 с кардолентами 5 перемещаются к центру многозвенника 7. При контакте кардолент 5 с деталью (иглы кардолент проникают в материал) электромагнит 15 отключается,
сердечник 16 перемещается до ограни-/ чителя 17 и длина троса 11 в пределах многозвенника 7 под воздействием пружин 12 увеличивается, происходит
равномерное перемещение пластин 4 с кардолентами 5 от центра многозвенника 7. При «этом кар 1;оленты захватывают деталь, обеспечивая ее равномерное натяжение. После этого
(фиг. 1). манипулятор 2 п9Дает захват с деталью , к швейному полуавтомату 23, перемещает деталь под иглой полуавтомата 23 по программе для получения строчки заданного контура и, наконец, перемещает захват 2 с деталью к приемному столу (не показан), где при срабатывании электромагнита 15, т.е. при Iepeмeщeнии пластин 4 с кардолентами 5 к центру
многозвенника 7, иглы кардолент 5 выходят из материала и посредством специального упора (не показан) захват 1 освобождают от детали. Затем электромагнит 15 отключается, и цикл
повторяется вновь.
Использование изобретения в Ьвейной отрасли расширяет технологические возможности устройства путей обеспечения возможности использования захвата при перемещении деталей
швейных изделий по программе на полуавтомате для получения строчки заданного контура, что, в свою очередь, способствует созданию робототехнологических комплексов.
/ Кроме того, предлагаемый захват может быть использован для захвата и манипулирования под иглой швейного полуавтомата любыми по размерам деталями, при этом в зависимости от конфигурации деталей будут вступать в контакт с деталью различные пластины с кардолентами.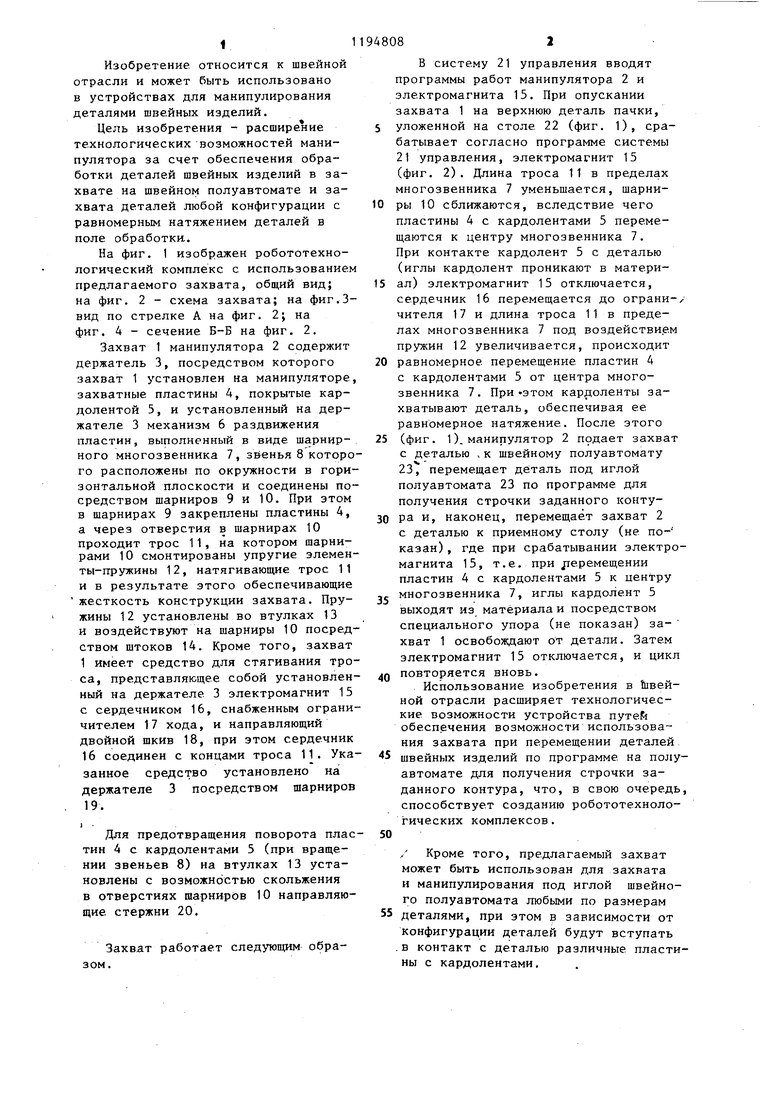
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм петлителя швейного полуавтомата для обработки деталей по замкнутому контуру | 1985 |
|
SU1293258A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1964 |
|
SU166226A1 |
| Швейный полуавтомат | 1986 |
|
SU1339175A1 |
| Стегальный швейный полуавтомат | 1988 |
|
SU1680837A1 |
| Модульная приставка для образования краеобметочных стежков к различным швейным машинам челночного стежка | 1991 |
|
SU1807137A1 |
| Швейный полуавтомат для обработки деталей по заданному контуру | 1978 |
|
SU779466A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОДА ЗАЖАТОГО ПОД ЛАПКОЙ КОНЦА ИГОЛЬНОЙ НИТКИ НА ИЗНАНОЧНУЮ СТОРОНУ СТАЧИВАЕМОГО МАТЕРИАЛА НА ШВЕЙНОЙ МАШИНЕ | 1991 |
|
RU2036994C1 |
| Устройство для перемещения деталей по заданному контуру на швейном полуавтомате | 1981 |
|
SU956654A1 |
| Захват робота | 1980 |
|
SU889422A1 |

1. ЗАХВАТ МАНИПУЛЯТОРА ДЛЯ ДЕТАЛЕЙ ШВЕЙНЫХ ИЗДЕЛИЙ, соде.ржащий держатель, захватные пластины с.кардолентой, механизм раздвижения пластин и привод, отличающийся тем, что, с целью расширения технологических возможностей, механизм раздвижения пластин включает шарнирньш многозвенник, звенья которого расположены в горизонтальной плоскости по окружности, при этом на одних соединительных шарнирах смонтированы захватные пластины, а другие расположены мезкду ними, связаны гибким тросом, несущим упругие элементы. 2. Захват по п. 1, отличающ и и с я тем, что имеет средство для стягивания троса, представляющее собой установленный на держателе электромагнит, сердечник которош го снабжен ограничителем хода и свя(Л зан с концами троса.
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ПОДАЧИ ДЕТАЛЕЙ ШВЕЙНЫХ ИЗДЕЛИЙ В ЗОНУ ОБРАБОТКИ | 0 |
|
SU234856A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
