t
Изобретение относится к холодной обработке металлов давлением и может быть использовано для изготовления деталей.
Целью изобретения является расширение технологических возможностей путем изготовления деталей различной конфигурации.
Поставленная цепь достигается тем, что устройство .для изготовления деталей, содержащее роторную машину, роторный механизм для удаления деталей из рабочей зоны роторной машины, связанный; с приводом роторной машины, кассеты для размещения деталей и механизм перемещения кассет, снабжено механизмом приема деталей из роторного механизма, вьшолненным в виде цепного транспортера, несущего гнезда для размещения деталей и кинематически связанного с роторным механизмом и механизмом перемещения деталей из гнезд цепного транспортера в кассеты, вьтолненным в виде манипулятора, кинематически связанного с механизмом перемещения кассет и роторным механизмом,
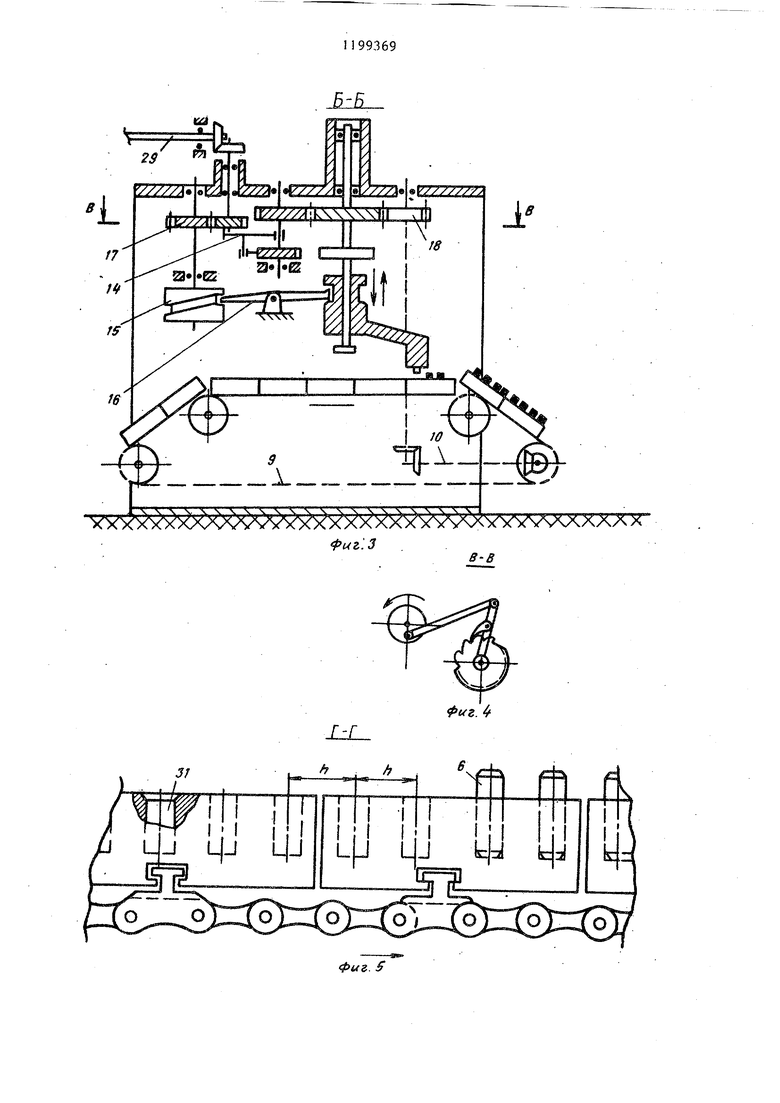
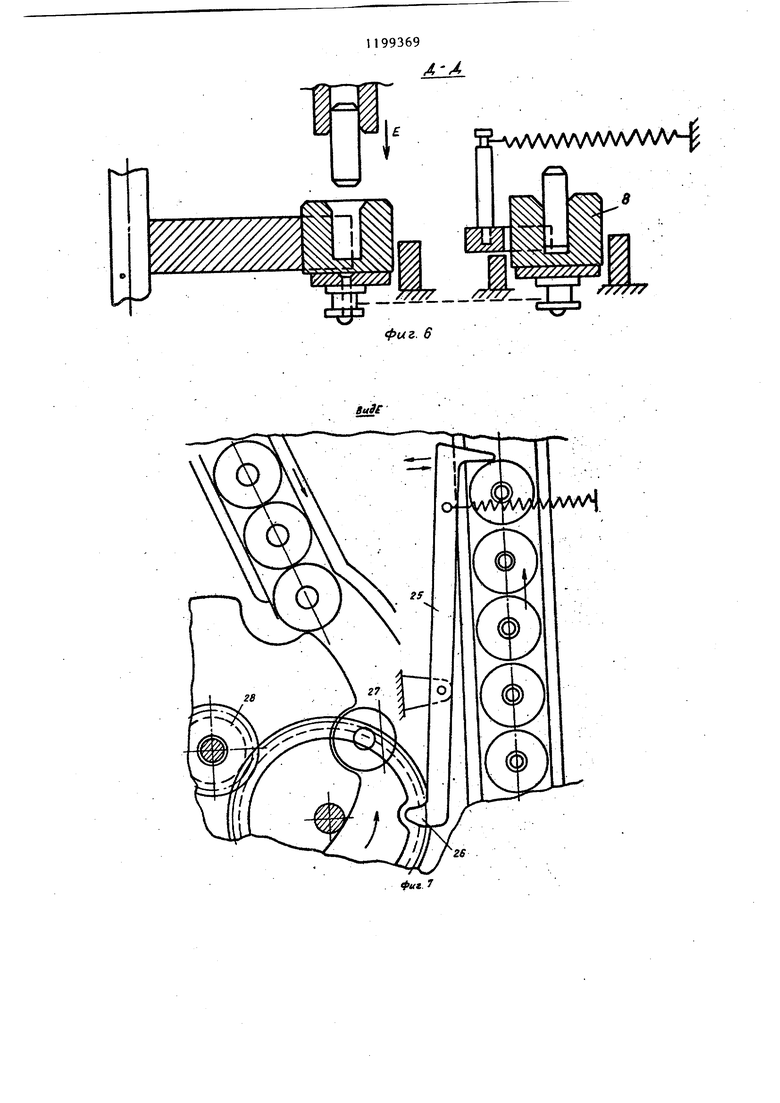
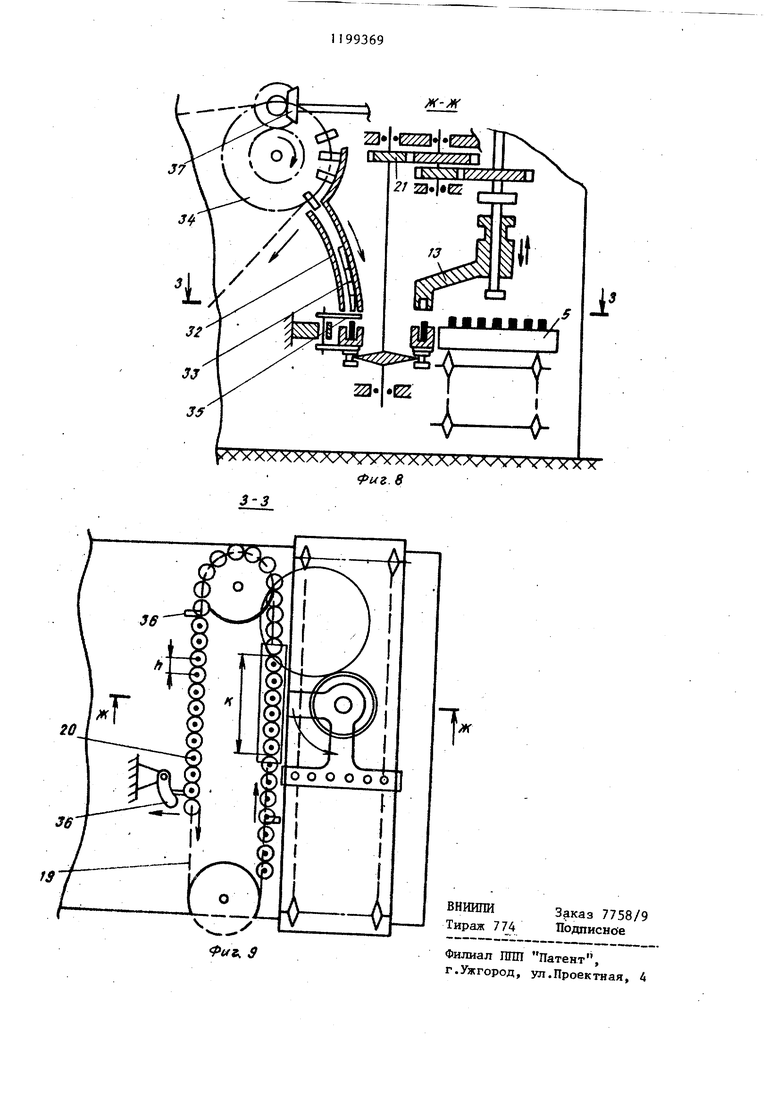
На фиг, I изображено устройство для изготовления деталей) на фиг.2разрез А-А на фиг, 1 на фиг. 3 разрез Б-Б на фиг. Ij на фиг, 4 разрез В-В на фиг, 3} на фиг, 5 разрез Г-Г на фиг. 1; на фиг, 6 разрез Д-Д на фиг. 2; на фиг, 7 вид Е на фиг. 6; на фиг. 8 - разрез Ж-Ж на фиг. 9; на фиг. 9 - разрез 3-3 на фиг. 8.
Устройство содержит (фиг, 1-3) роторный механизм 1, имеющий ползуны 2, захватные органы 3, зону разгрузки на угле ot и привод 4, кассеты 5 для деталей 6, механизм 7 приема, выполненный в виде горизонтально замкнутого цепного пластинчатого конвейера с комплектом индивидуальных носителей 8, вьтолненных в виде цилиндра с центральным глухим гнездом для размещения детали 6, механизм 9 перемещения кассет, выполненный в виде вертикально замкнутого цепного конвейера для кассет 5 с приводом 10 циклического хода и узлом 1I, механизм перемещения деталей перекладки деталей 6 из носителей 8 в кассеты 5, При этом механизм 7 огибает ротор i на угле и кинематически связан с ним посредством
99369
цепной передачи 12, мехсанизм перемещения (узел накопления) кассет 5 установлен параллельно механизму 7, а узел 1I (механизм перемещения де- .
5 талей 6 из носителей 8 в кассеты 5 ) выполнен в виде снабженного многоместным электромагнитным захватом I3 манипулятора с приводом 14 циклического поворота 14 (в виде храпо- 10 вого механизма ) и привод вертикального хода (в виде кулачка 15 и двуплечего рычага 16), кинематически связанных между собой (за счет we- стеренной связи 17 ) и установленного над механизмом 9 с возможностью циклической передачи группы деталей . (например, 10 шт.) из носителей 8 в кассеты 5. Привод 14 циклического поворота манипулятора кинематически связан посредством шестерен 18 с приводом 10 механизма 9, Конвейер 19 снабжен захватами 20 и шестеренной передачей 21.
Устройство работает (фиг. 1-3)
25 следующш образом.
Ротор 1 вращается совместно с рабочими и транспортными роторами роторной машины посредством шестеренного привода 4 и через цепную пере-30 дачу 12 вращает с большей скоростью конвейер механизма 7, на торцовых пластинах которого располагается комплект носителей 8, которые ротором 22 подаются щ ротор 1, и на
j угле d. захватами 3 посредством приводных ползунов 2 пересаживаются в гнезда носителей, которые на угле d находятся в гнездах 23 приемного диска 24 ротора, а затем вейером транспортируется в зону комплектации групп носителей 5 с.
Комплектация групп носителей 8 производится при помощи двуплечего подпружиненного рычага 25,один конец которого имеет отсекающий выступ 26 .(фиг. 6, 7), контактирующий с носителем 8, а другой - взаимодействует с кулачком 27, кинематически связанным с ротором разгрузки посредством шестерен 28.
От ротора до отсекающего выступа 26 размещаются 2-3 группы носителей 8. Через каждые 5 с рычаг 25 55 отсекает и накапливает на непрерывно движущемся конвейере механизма 7 в течение 2,5 с детали, которые, находясь в статическом положении.
3
захватьюаются манипулятором и переносятся в кассеты 5,
Манипулятор 11 работает от привода 29, кинематически связанного с ротором 1 (фиг. 3), и храпового механизма 14. В тот момент, когда на конвейере механизма 7 накопилась группа деталей, манипулятор своим многоместным электромагнитным захватом 13 совершает ход вниз (посредством кулачка 15 и рычага 16) и берет детали (10 шт.) из носителей 8 (за счет подключения намотки электромагнита к напряжению через коллектор 30 ) (фиг. 1), затем поднимается вверх, за счет храпового механизма 14 проворачивается по стрелке (фиг.. 2) на 90j вновь опускается вниз и вводит детали 6 в гнеда 31 кассеты 5 (фиг, 5). После этого электромагнит отключается, детали остаются в кассете, а манипулятор поднимается вверх, поворачивается в ту же сторону на 90 и вторы захватом забирает из носителей очередную rpyrtny деталей.
После загрузки в кассеты 5 группы деталей конвейер 9 накопления кассет совершает ход вперед на шаг J1 (фиг. 5), равный расстоянию между рядами гнезд 31 в кассетах. Таким образом, ряд за рядом заполняются изделиями все гнезда каждой кассеты, С одного конца на конвейер устанавливаются порожние кассеты, а с другого - снимаются заполненные изделиями и могут транспортироватьс на другой участок или цех, или в последующую обрабатьшающую ротор- кую машину, оснащенную аналогичным
99369
устройством, предназначенным для загрузки деталей в роторную машину из кассет.
При поступлении деталей циклически и комплектами, например по 20 шт. (фиг. 8-10 ),устройство работает аналогично. Узел разгрузки 32 деталей 33 из машины 34 вьтолнен в виде 20-ручьевого гравитационного накопительного лотка с общим отсекателем 35. Механизм приема выполнен в виде замкнутого конвейера 19 с захватами 20 для деталей работает циклически, совершая дые 5 с движения вперед по стрелке. Каждью его шаг-равен 10 шагам li с выстоем в течение 2,5 Cs В тот момент, когда под 20-ю ручьями гравитационного лотка 32 остановилось
20 20 порожних захватов конвейера 19, открывающего зацепами 36 (которые расположены через 20 шагов )общий отсекатель 35, изделия 33 падают в захваты 20.
25 Конвейер 19 за счет шестеренной передачи 21, связанной с шаговым приводом (фиг. 3), шагает вперед, неся изделия в зону разгрузки К. В зоне разгрузки К захват 13 манипулятора за каждый цикл берет изделия (Ю шт. ) из захватов конвейера 19 и передает в кассеты 5 и т.д. Привод . машины 34 кинематически связан колесом 37 с приводом 29 (фиг, 8 и 3).
Эффект от использования устройства заключается в расширении техно- лог1ет:еских возможностей путем изготовления деталей различной конфигурации.
fue. г ХХХ ХХХХХАЛ ЧЛЛ ГХХХ XX XXX .З B-vvЛЛЛЛЛЛ/W
фиг. 6 ЛЛЛ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для удаления деталей из роторной машины | 1982 |
|
SU1050885A1 |
| Транспортно-накопительный участок автоматических роторно-конвейерных линий | 1988 |
|
SU1569185A1 |
| Роторно-конвейерная машина | 1983 |
|
SU1180318A1 |
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| РОТОРНЫЙ АВТОМАТ ДЛЯ ОРИЕНТАЦИИ ИЗДЕЛИЙ С БУРТОМ | 1991 |
|
RU2021144C1 |
| Роторно-конвейерная машина | 1977 |
|
SU686808A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ЛУЖЕНИЯ ЗАГОТОВОК СТЕКЛОКЕРАМИЧЕСКИХ КОНДЕНСАТОРОВ РАДИОДЕТАЛЕЙ | 1989 |
|
SU1820573A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1084203A1 |
| Линия для заливки пакетов роторов | 1985 |
|
SU1380856A1 |
1. УСТРОЙЙТВО ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ, содержащее роторнуюмашину, роторный механизм для удаления деталей из рабочей зоны роторной машины, связанный с приводом роторной машины, кассеты для размещения деталей и механизм перемещения кассет, отличающееся тем, что, с целью расширения технологических возможностей путем изготовления деталей различной конфигурации, оно снабжено механизмом приема деталей из роторного механизма, вьшолненным ввиде цепного транспортера, несущего гнезда для размещения деталей и кинематически связанного с роторньм механизмом и механизмом перемещения деталей из гнезд цепного транспортера в кассеты, вьшолненным в виде манипулятора, кинематически связанного с механизмом перемещения кассет и роторным механизмом. 2, Устройство по п. , о т л и (П чающееся тем, что механизм перемещения кассет вьшолиен в виде конвейера, установленного параллель- но цепному транспортеру.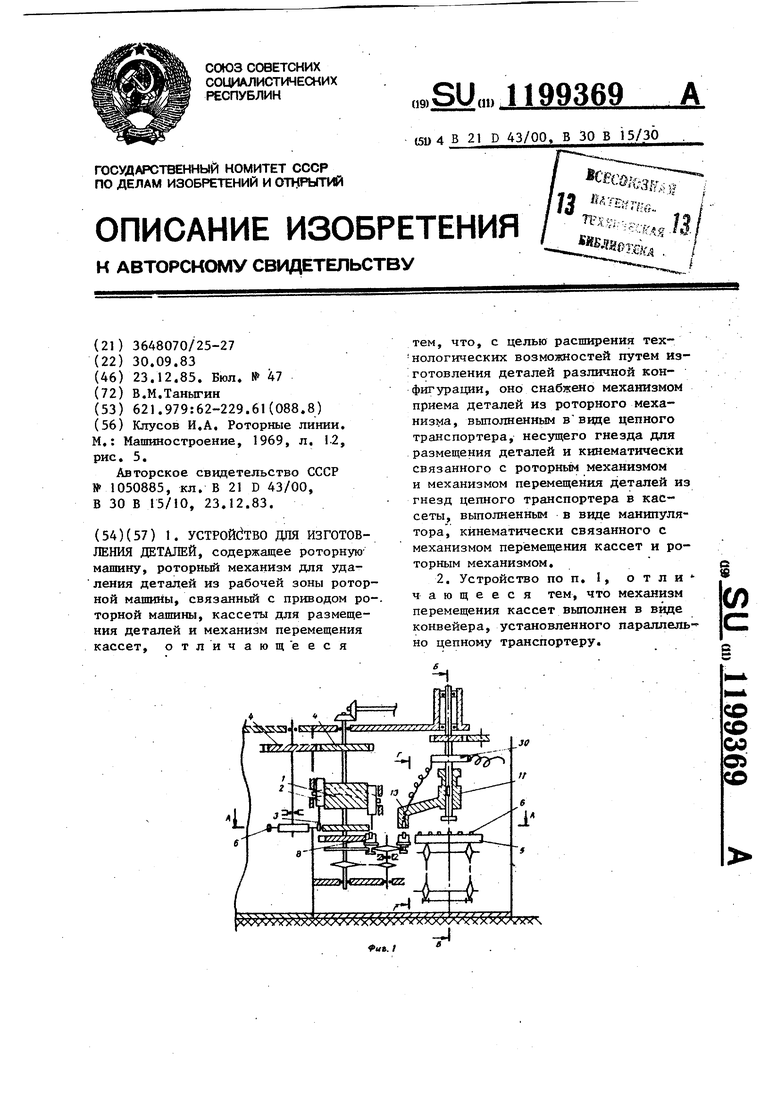
| Клусов И.А | |||
| Роторные линии | |||
| М.: Машиностроение, 1969, л | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для удаления деталей из роторной машины | 1982 |
|
SU1050885A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
