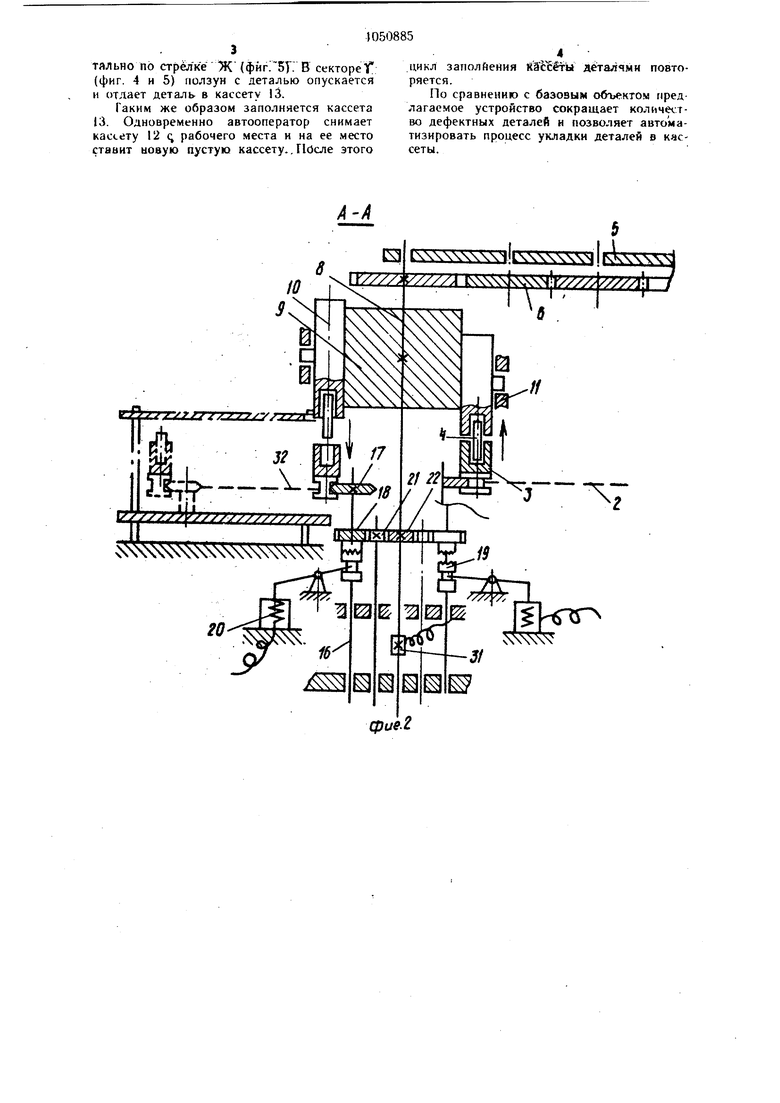
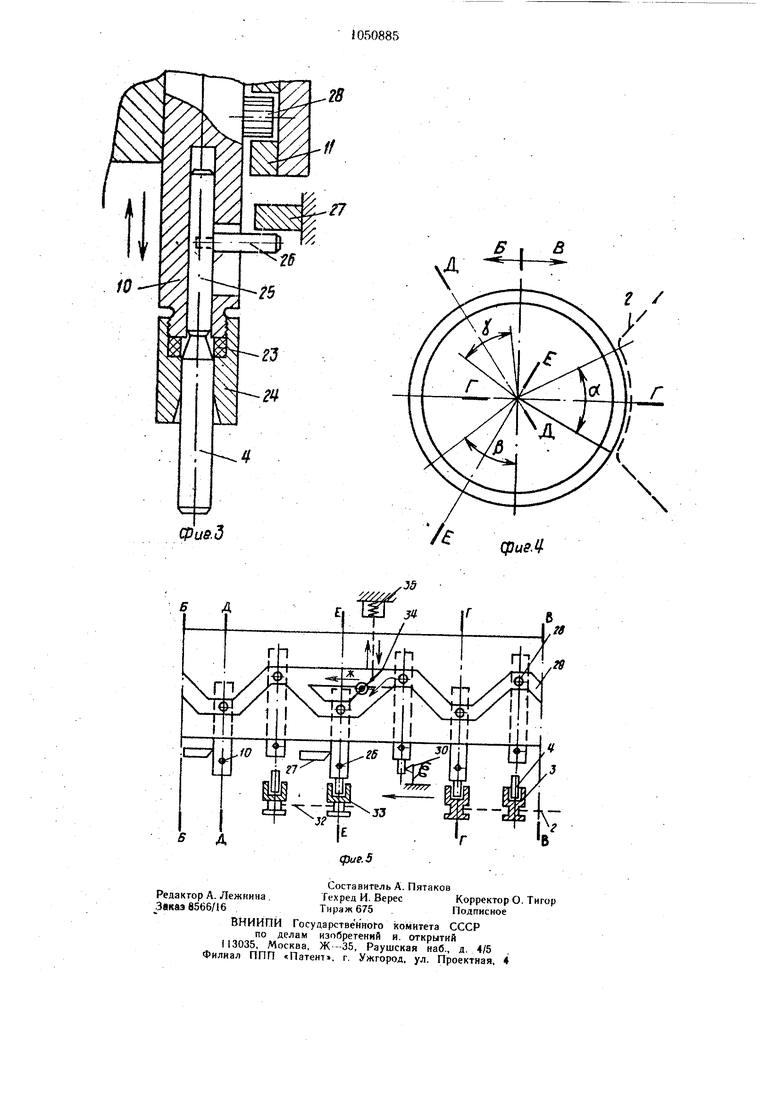
Изобретение otHoCHTCH ( мехаиизацни и af3TOMaTH3auHH удаления деталей из обрабатывающих машии. И,шсстио устройство для удаления деталей из роторной машины, содержащее основание, установленный на основании ротор разгрузки с захватными органами и привод ротора разгрузки I). 11звестно также устройство для удаления деталей из роторной машины, содержашее станину, ротор разгрузки с ползунами и захватными органами и привод ротора разгрузки (2|. . Недостатков известных устройств является невозможность автоматически выдавать детали 1юштучно в ориентированном виде в механизированные кассеты, для хранения и транспортирования их в последующие машины, что приводит к браку деталей с легко повреждаемой поверхностью. Цель изобретения - увеличение выхода годных деталей, путем обеспечения поштучной укладки их в тару. Поставленная цель достигается тем, что устройство для удаления деталей из роторной машины, содержащее станину, ротор разгрузки с ползун ами и захватными органами, привод ротора разгрузки, снабжено двумя приводными кассетами, установленными в зоне разгрузки, причем привод каж дои кассеты выполнен в виде вала с жестко закрепленной на нем звездочкой, свободно установленного на валу зубчатого колеса, управляемой муфты, одна из полумуфт которой свободно установлена на валу и жестко связана с зубчатым колесом, а другая связана с валом с возможностью перемещения вдоль него, при этом зубчатое колесо связано зубчатой передачей с приводом ротора разгрузки, а каждый захватный орган выполнен в виде размещенного в ползуне кольцевого магнита, 1зыталкивателя и упора, установленного с возможностью взаимодействия с выталкивателем. На фиг. I схематически изображено преД лагаёмое устройство, общий вид; на фиг . 2 .разрез А-А на фиг. 1; на фиг. 3 - ползун с захватом для детали; на фиг. 4 - рабочая циклограмма ротора загрузки; на фиг. 5 - то жб, развертка. Устройство (фиг. 1 и 2) содержит рабочие .роторы - I, транспортный конвейер 2с захватными органами в виде стаканов i 3для деталей 4, станину 5, привод 6 для вращения роторов и ротор 7 разгрузки деталей 4 из машины. Ротор разгрузки включает вал 8, барабан 9 с ползунами 10 и кольцевой кулачок 11. С целью создания условий для автоматической разгрузки деталей поочередно в две механизированные кассеты 12 и 13 (для исключения простоев машины при замене заполненной кассеты) ротор 7 длй разгрузки деталей 4 дополнительно снаб.жен двумя приводными механизмами 14 и 15 (фиг. I) для кассет 12 и 13, каждый из которых включает вертикальный вал 16 (фиг. 2) в опорах, на котором закреплена цепная звездочка 17 и на который свободно посажены шестерня 18 с торцовыми зубцами на ступице и зубчатая муфта 19, установленная с возможностью осевого перемещения и взаимодействия с торцовыми зубцами шестерни 18, при этом муфта 19 снабжена электромагнитным приводом 20, шестерня 18 соединена через паразитную шестерню 21 с другой шестерней 22, жестко закрепленной иа валу 8 ротора. Ползуны 10 .{фиг. 3) ротора снабжены, захватным органом 23, выполненным в виде постоянного кольцевого магнита, закреплен-, ного в ползуне гайкой 24, и выталкивателя 25 пальцем 26, работающего от стационарного местного кулачка 27. Роторкая машина работает следующим образом. Автоопёратор устанавливает пустые кассеты 12 и 13 на свои рабочие места вокруг ротора 7 загрузки (фиг. 1). Запус кают роторную машину, при этом конвейер 2 и ротор 7 загрузки начинают синхронно вращаться. Ползун 10 своим роликом 28 (фнг. 3 и 5) взаимодействует с нррфильным пазом 29 кольцевого кулачка 11 и получает необходимую траекторию движения. В секторе л ползун идет вниз и 6epet Деталь 4 из стакана 3 конвейера 2. В сек-торе наличие детали в ползуне контролируется стационарно установленным датчиком 30 (фиг. 5), который через электрический коллектор 31 (фиг. 2) включает электрический привод 20, последний сцепляет зубчатую муфту 19 с торцовыми зубЦами шестерни 18 и тем самым приводит во вращение звездочку 17 и, следовательно, накопительный конвейер 32 кассеты 12. В сектореjS ползун 10.(фиг. 5), перемещаясь вниз, вводит деталь в гнездо 33 конвейера 32. Приходе ползуна вверх палец 26 упирается в неподвижный участок кулачка 27 (фиг. 3 и 5) и деталь 4 остается в гнезде. 3 конвейера кассеты 12. Каждый ползуй |)отор,а поочередно совершает подобный Дикл до заполнения кассеты 12 деталями. При отсутствий в ползуне 10 очеред фой детали приводной механизм 14 от кассеты 1.2 автоматически отключаетсяч тем самым гарантируется 100% -ное заполнение кассет деталями. После заполнения кассеты срабатывает стрелка. 34 от электромагнитного устрой-. ства 35, перекрывает очередному ролику ползуна 10 путь для спуска вниз (к.кассете 12) и заставляет его двигаться гпризон
тлльно no стрелке Ж (фйгГ5У; В секторе1Г (фиг. 4 и 5) ползун с деталью опускается и отлает в кассету 13.
Таким же образом заполняется кассета 13. Одновременно автооператор снимает кассету 12 с; рабочего места и на ее место ставит новую пустую кассету., После этого
цикл заполйения Ййёты деталями повторяется.
По сравнению с базовым объектом пред латаемое устройство сокращает количество дефектных деталей и позволяет автоматизировать процесс укладки деталей в кассеты.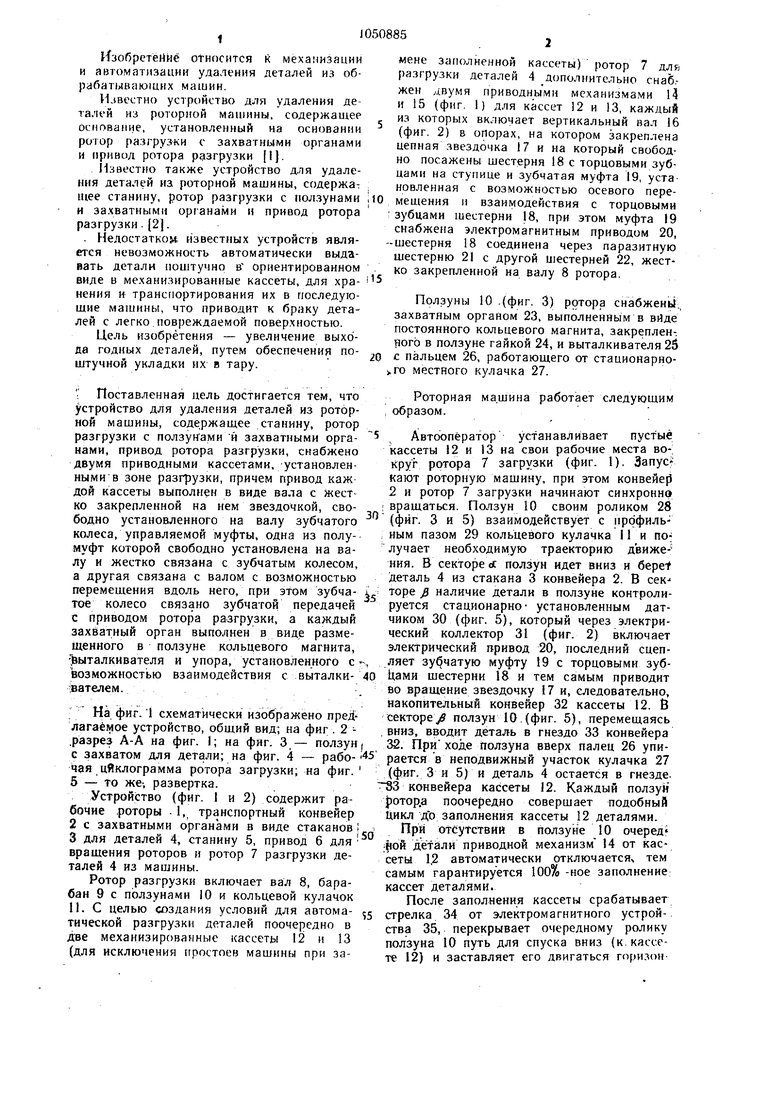
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Роторная линия | 1990 |
|
SU1796323A1 |
| Роторно-конвейерная машина | 1977 |
|
SU686808A1 |
| Роторно-конвейерная линия | 1980 |
|
SU952533A1 |
| Многопоточная рабочая машина непрерывного действия | 1977 |
|
SU732147A1 |
| Роторно-конвейерная машина | 1977 |
|
SU722823A1 |
| Роторно-конвейерная машина | 1978 |
|
SU818811A1 |
| Роторно-конвейерный автомат | 1979 |
|
SU856747A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Роторная машина для обрезки полых цилиндрических изделий | 1989 |
|
SU1632659A1 |
УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ДЕТАЛЕЙ ИЗ РОТОРНОЙ . МАШИНЫ, содержащее станину, ротор разгрузки с Тползунами и захватными органами, привод ротора разрруз1 и, отличающееся тем, что, с целью увеличения вЫхоДа годных Деталей путем обеспечения поштучной укладки их в тару, оно снабжено двумя приводными кассетами, установленными в зоне pa3rpy3Kft, причем привод каждой кассеты выполнен в виде вала с жестко закрепленной на нем звездочкой, свободно установленного на валу зубчатого колеса, управ ляемой муфты, одна из полумуфт которой; свободно установлена на валу н жестко связана с зубчатым колесом, а другая связана с валом с возмож(юстью перем щеИй1Т вдоль него, при этом зубчато е колесо связа но зубчат.ой передачей с приводом ротора разгрузки, а каждый захватный орган выполнен в виде размещенного в ползуне кольцевого магнита выталкивателя и упора, установленного с возможностью взаимодействия с выталкивателем. .
tn Y//// ////X
lO .гV TV f
flXrhr.. I . .- . I
J V 1
ГчЧЧХХХ
| I | |||
| Кошкин Л | |||
| И | |||
| Комплексная автоматизация .лронзводства на базе роторных машин | |||
| М.,- «Машиностроение, 1972, с | |||
| Ручная тележка для грузов, превращаемая в сани | 1920 |
|
SU238A1 |
| Приспособление для градации давления в воздухопроводе воздушных тормозов | 1921 |
|
SU193A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Клусов И | |||
| А | |||
| Роторные линии | |||
| М., «Машиностроение, 1969, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
