Изобретение относится к робототехнике, а именно к узлам оснащения промышленных роботов и манипуляторов, и может быть использовано в различнь1х отраслях машиностроения, в частности в энергомашиностроении, для оснащения серийных промышленных роботов, используемых на операциях горячей и холодной штамповки для захвата и манипулирования одновременно двумя заготовками, как однотипной, так и разной формы и длины.
Целью изобретения является повышение производительности и расширение технологических возможностей за счет возможности обслуживать различные виды технологического оборудования с различными системами базирования и позиционирования заготовок.
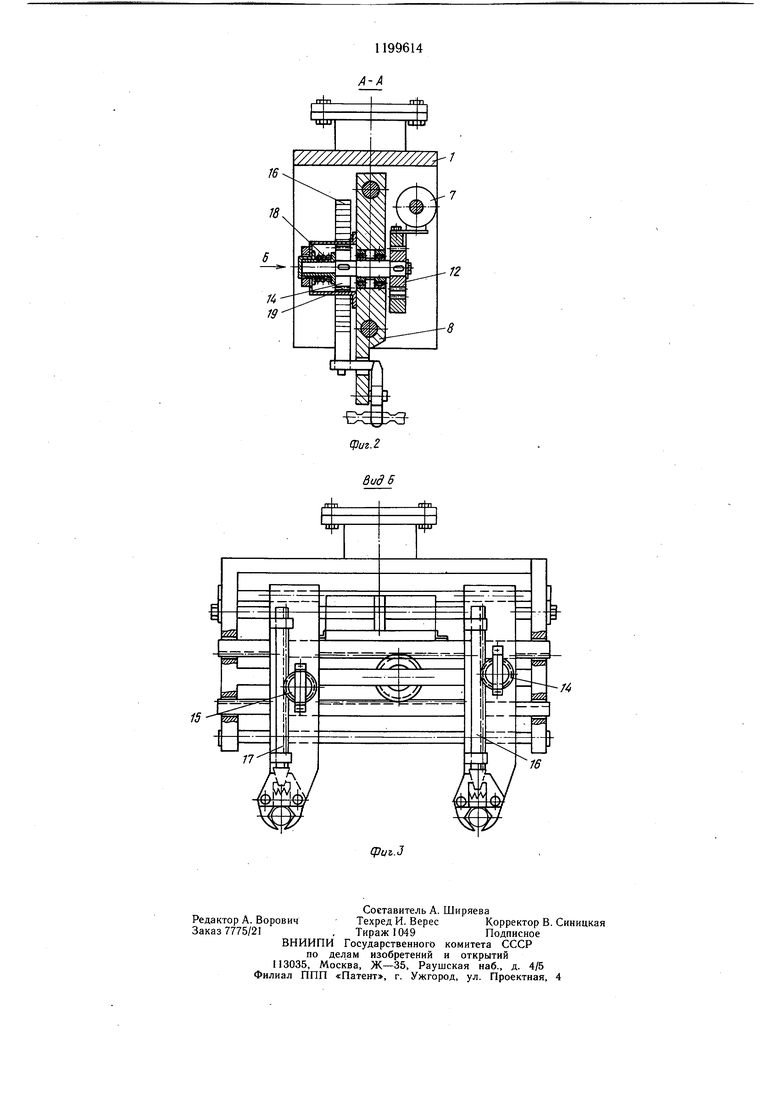
На фиг. 1 изображено захватное устройство промышленного робота (промежуточное положение), общий вид; на фиг. 2 - разрез А-А на фиг. ; на фиг. 3 - вид Б на фиг. 2.
Захватное устройство состоит из корпуса 1 с жестко укрепленными в нем направляющими 2, штоком 3 и поворотносинхроиизирующим зубчатым колесом 4, контактирующим с зубчатыми рейками 5 и 6, смонтированными с возможностью возвратно-поступательного перемещения в корпусе 1. На зубчатой рейке 5 жестко закрсчглен корпус цилиндра 7. На направляющих 2 корпуса подвижно укреплены ползушки 8 и 9, на которых смонтированы валы 10 и 11 с жестко укрепленными на них основными зубчатыми колесами 12 и 13, контактирующими соответственно с зубчатыми рейками 5 и 6 и дополнительными зубчатыми колесами 14 и 15, контактирующими с рейками 16 и 17, подвижно укрепленными в ползушках. На концах валов смонтированы регулируемые пружины 18, создающие тормозной момент на дополнительных зубчатых колесах 14 и 15 при помощи фрикционных прокладок 19, укрепленных на валах .между ползушками 8 и 9 и упо.мянутыми зубчатыми колесами. В нижних частях ползушек 8 и 9 на осях 20 попарно укреплены зажимные губки 21. Каждая пара губок контактирует с клиньями 22 реек 16 и 17 и подпружинена пружинами 23. На корпусе 1 укреплены упоры 24 и 25. Захватное устройство монтируется на руке 26 промышленного робота.
Захватное устройство работает следующим образом.
В исходном положении зажимные губки 21 загружены заготовками. При повороте руки робота с захватным устройством из позиции загрузки в позицию выгрузки и
одновременной подаче давления в левую полость цилиндра 7 его корпус вместе с рейкой 5 перемещается влево (фиг. 1), а зубчатая рейка 6 - вправо. При этом ползушка 8 получает такое же перемещение влево, а ползушка 9 - вправо. При достижении ползущками 8 и 9 упоров 24 движение обеих ползушек прекращается, а рейки 5 и 6, продолжая перемещаться, преодолевают тормозные моменты, начинают
0 вращать зубчатые колеса 12 и 13 и жестко соединенные с ними посредством валов 10 и 11 зубчатые колеса 14 и 15, которые, взаимодействуя с зубчатыми рейками 16 и 17, перемещают их вверх, выводя клинья 22, а пружины 23, воздействуя на губки 21, разжимают заготовки.
Для вывода захватного устройства в положение загрузки давление подается в правую полость цилиндра, его корпус 7 вместе с рейкой 5 перемещается вправо, а зубчатая рейка 6 - влево. При достижении положения загрузки ползущки 8 и 9 упираются в упоры 25, рейки 5 и 6, преодолевая тормозные моменты, начинают вращать зубчатые колеса 12 и 13 и жестко соединенные с ними посредство.м валов 10 и 11
5 зубчатые колеса 14 и 15, которые, взаимодействуя с зубчатыми рейками 16 и 17, перемещают их вниз, вводя клинья 22 и, преодолевая сопротивление пружин 23, воздействуют на губки 21 и зажимают заготовки .
0 В дальнейшем цикл повторяется.
Настраивая упоры 24 и 25 соответствующим образом, можно в щироком диапазоне изменять базирование зажимных губок и автоматически изменять позиционирование в позиции захвата заготовок и в позиции их
выгрузки, что позволяет расширить технологические возможности как промышленного робота, так и обслуживаемого им технологического оборудования (в данном конкретном случае робот транспортирует горячие фасонные заготовки от стана поперечно-клиновой прокатки в штамп пресса для их горячей штамповки, причем после разделения заготовок в плоско-клиновом инструменте стана база зажимных губок должна быть наименьшей, а в зоне загрузки заготовок в штамп-большей, что объясняется конструктивными и технологическими условиями установки ручьевых вставок штампа, их взаимным расположением и другими факторами). Кроме того, за счет совмещения операций захвата (выгрузки) заготовок, автоматического изменения позиционирования зажимных губок при одновременном повороте руки робота повышается производительность труда, а следовательно повышается коэффициент загрузки технологического оборудования.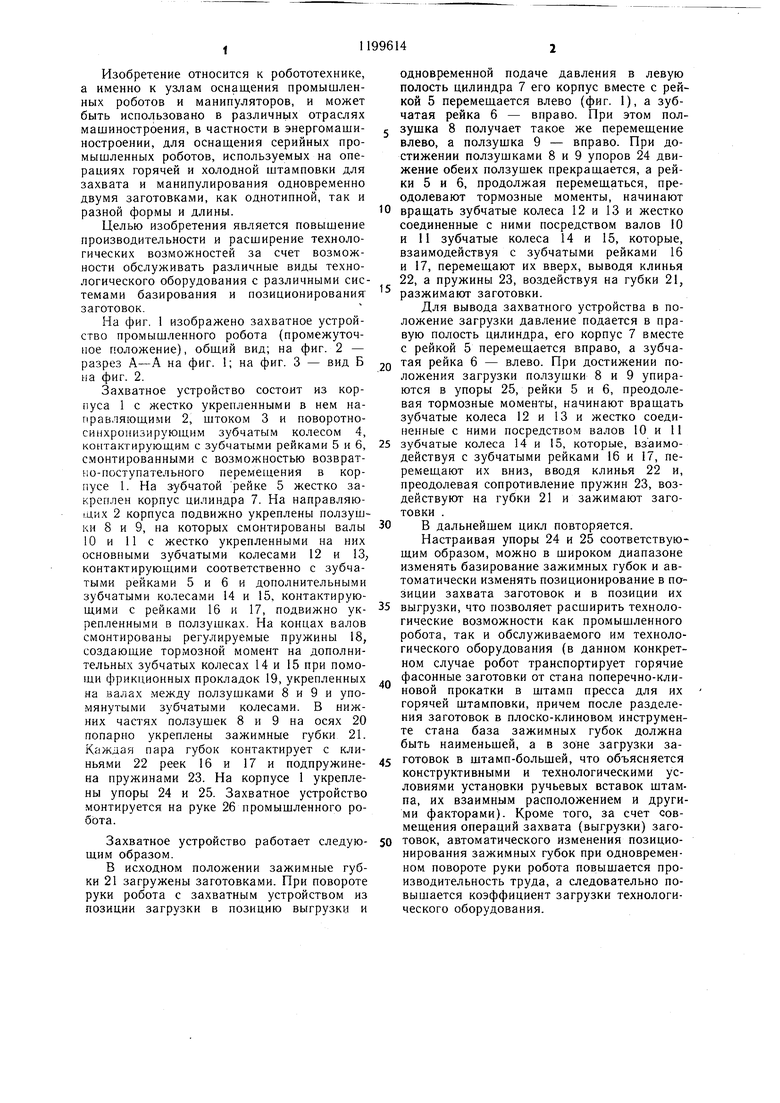
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок-автомат для двусторонней гибки труб | 1985 |
|
SU1271611A1 |
| Захватное устройство | 1986 |
|
SU1449340A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Штамп для листовой штамповки | 1984 |
|
SU1247124A1 |
| Многопозиционное захватное устройство | 1983 |
|
SU1180261A1 |
| Грейферная подача к многопозицион-НОМу пРЕССу | 1979 |
|
SU829266A1 |
| Захватное устройство | 1987 |
|
SU1407800A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1980 |
|
SU912353A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее силовой цилиндр, зажимные узлы, установленные на корпусе с возможностью перемещения один относительно другого, и механизм перемещения зажимных узлов, причем каждый зажимной узел содержит зажимные губки и механизм их сведения, отличающееся тем, что, с целью повышения производительности и расщире ния технологических возможностей, каждый механизм сведения зубчатых губок снабжен зубчатой рейкой, основным и дополнительным зубчатыми колесами, смонтированными на общем валу, а механизм перемещения зажимных узлов выполнен в виде двух зубчатых реек, связанных между собой зубчатым колесом, одна из зубчатых реек жестко связана с корпусом силового цилиндра, при этом основное зубчатое колесо механизма сведения зажимных губок взаимодействует с одной из зубчатых реек механизма перемещения зажимных узлов, а дополнительное зубчатое колесо взаимодействует с зубчатой рейкой механизма сведения зажимных губок. (Л ;0 Од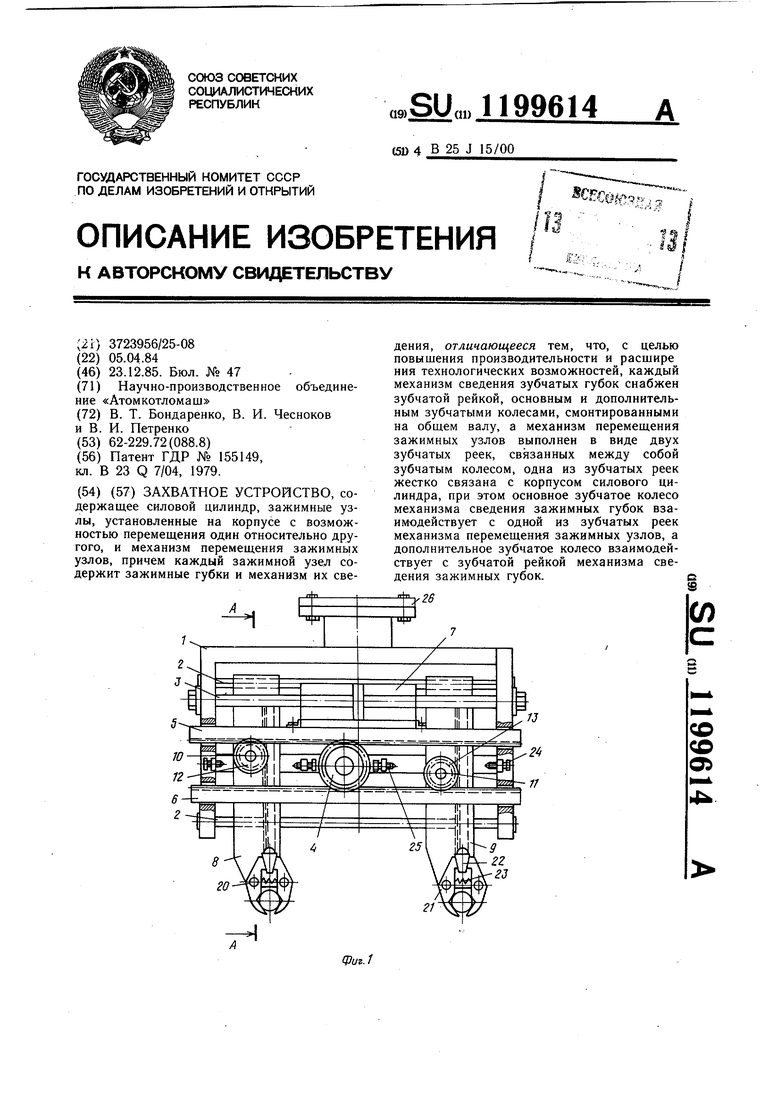
| 0 |
|
SU155149A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
