ФИ9
, ri
корпусе 1 и связанных через передаточный механизм с выходным звеном , силового привода, снабжено пластиной 11, выполненной в виде сектора с пазами. Пластина 11 жестко закреплена на втулке 12 и толкателе 13 с возможностью поворота в горизонтальной плоскости и поочередного взаимодействия своими пазами с кольцевыми проточками 9 осей-реек 8. При включении силового привода происходит вертикальное перемещение толкателя 13, пластины 11 и с лепленной с ней оси- рейки 8. При этом осуществляется зажим-разжим двух пар губок 3, установленных на валах-шестернях 4, взаимодействующих с данной осью-рейкой. Дпя включения в работу другой пары зажимных органов с помощью механизма ротации осуществляют поворот пластины 11 до ее зацепления с проточкой на другой оси-рейке 8. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| УСТРОЙСТВО для ПОДАЧИ ШТУЧНЫХ ЗАГОТОВ( в ЗОНУ ОБРАБОТКИ | 1972 |
|
SU327958A1 |
| Манипулятор | 1986 |
|
SU1313688A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |

Изобретение относится к машиностроению и может быть использовано для загрузки-разгрузки технологического оборудования. Целью изобретения является расширение эксплуатационных возможностей. Для этого захватное устройство, содержащее две пары зажимных органов, закрепленных на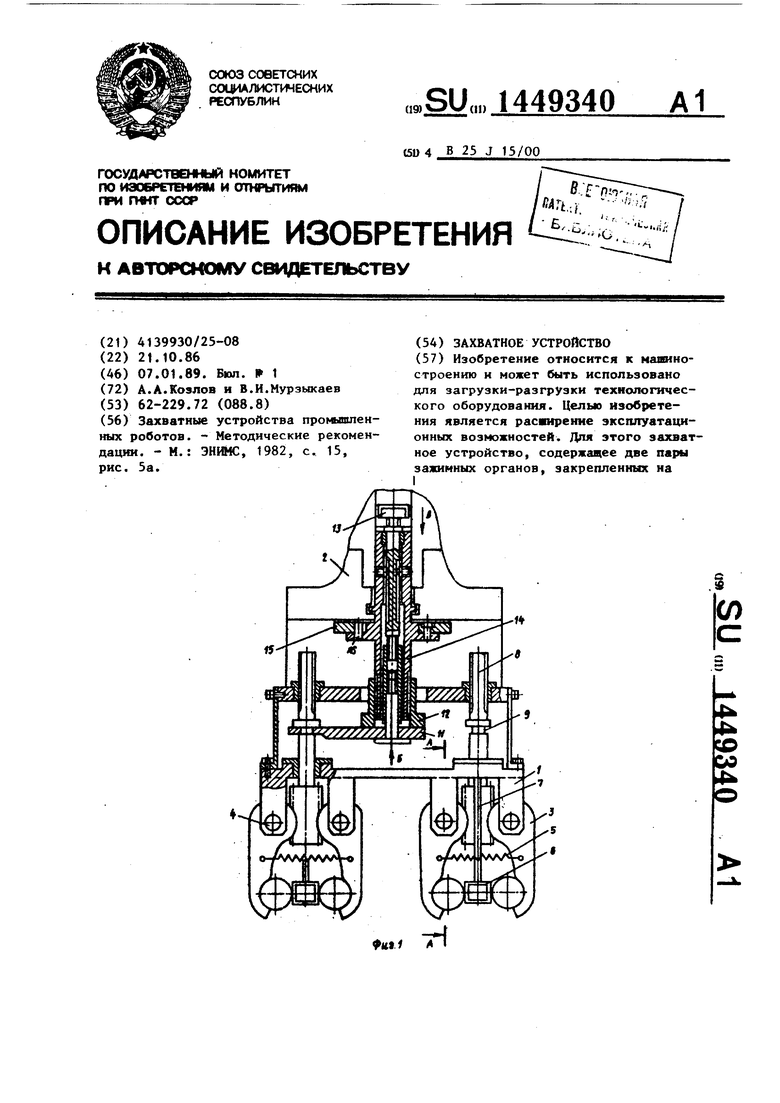
1
Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов (манипуляторов).
Целью изобретения является расши- рение эксплуатационных возможностей устройства за счет переноса одновременно четьфех длинномерных заготовок
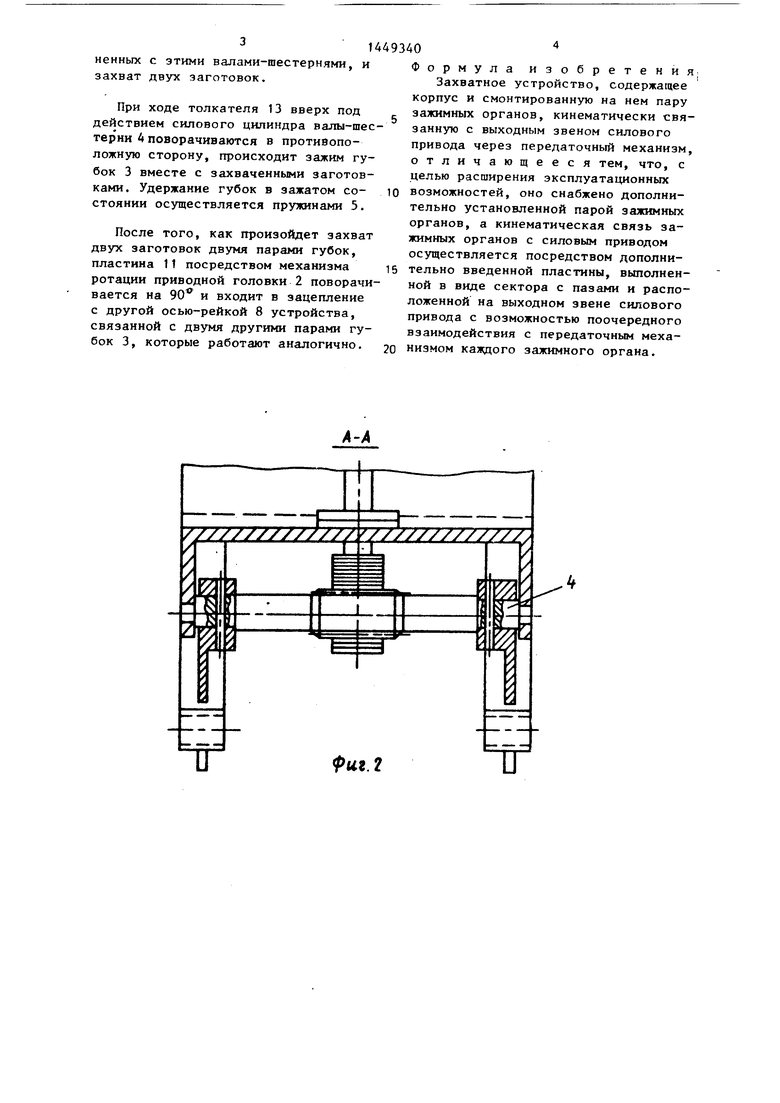
На фиг. 1 изображено захватное устройство промышленного робота, общий вид, разрез, на фиг. 2 - разрез А-А на фиг. 1/ на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 1,
Захватное устройство состоит из корпуса 1, жестко закрепленного на приводной головке 2 промьгашенного робота, и передаточного механизма, кинематически связьтающего силовой привод промышленного робота с зажиц- ными органами захватного устройства. Приводная головка 2 промышленного робота (на фиг. 1 показано условно) содержит вертикальный силовой цилиндр и механизм ротации.
Корпус 1 снабжен двумя парами зажимных органов, состояЕЩХ из четырех подвижных губок 3, установленных на валах-ш стернях 4 и соединенных между собой попарно пружинами 5. Между губками 3 каждой пары установлена дополнительная губка 6, закрепленная на упругой пластине 7, соединенной с корпусом 1. Упругая пластина 7 обеспечивает самоустановку дополнительно губки 6.
Передаточный механизм состоит из двух осей-реек 8, находящихся в зацеплении с двумя валами-шестернями 4 каждая и имеющих кольцевую проточку
0 5
С
0
5
9, в которую входит своим пазом 10 пластина 11, выполненная в виде сектора и жестко закрепленная на втулке 12 и толкателе 13. Втулка 12 имеет внутренние шлицевые пазы, которыми она входит в зацепление с корпусом 14 толкателя 13, на нижнем конце которого имеются также шлицевые пазы. На корпусе 14 толкателя 13 также жестко закреплен диск 15, с помощью которого осуществляется поворот пластины 11 в горизонтальной плоское ти на нужный угол.
Толкатель 13 взаимодействует с вертикальным силовым цилиндром про- мьшшенного робота (не показан), который сообщает ему возвратно-поступательное движение и осуществляет зажим и разжим губок 3.
Устройство работает следующим образом.
Механизм ротации приводной головки 2 поворачивает жестко связанный с ним корпус 14 толкателя 13, который передает вращение через шлицевое соединение втулке 12 и жестко связанной с ней пластине 11, которая своим пазом входит в зацепление с кольцевой проточкой одной из осей-реек 8.
После этого силовой цилиндр приводной головки 2 воздействует на толкатель 13, сообщая ему движение вниз, при этом перемещается вниз связанная с ним пластина 11 и ось-рейка 8. Через зубчатое зацепление оси- рейки 8 с валами-шестернями 4, последние поворачиваются вокруг собственной оси, вследствие чего происходит разжим двух пар губок 3, соеди ненных с этими валами-шестернями, и захват двух заготовок.
При ходе толкателя 13 вверх под действием силового цилиндра валы-шестерни 4 поворачиваются в противоположную сторону, происходит зажим губок 3 вместе с захваченными заготовками. Удержание губок в зажатом состоянии осуществляется пружинами 5.
После того, как произойдет захват двух заготовок двумя парами губок, пластина 11 посредством механизма ротации приводной головки 2 поворачивается на 90 и входит в зацепление с другой осью-рейкой 8 устройства, связанной с двумя другими парами губок 3, которые работают аналогично.
1449340
Формула изобретения Захватное устройство, содержащее корпус и смонтированную на нем пару зажимных органов, кинематически связанную с выходным звеном силового привода через передаточный механизм, отличающееся тем, что, с целью расширения эксплуатационных возможностей, оно снабжено дополнительно установленной парой зажимных органов, а кинематическая связь зажимных органов с силовым приводом осуществляется посредством дополнительно введенной пластины, выполненной в виде сектора с пазами и расположенной на выходном звене силового привода с возможностью поочередного взаимодействия с передаточным механизмом каждого зажимного органа.
Вид Б
15
| Захватные устройства промышленных роботов | |||
| - Методические рекомендации | |||
| - М.: ЭНИМС, 1982, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
