97
//
13 7
(;о со
О)
о
Изобретение относится к робототехнике, в частности к схватам промышленных роботов, и может быть использовано при загрузке станков плоскими цилиндрическими заготовками, обрабатываемыми с двух сторон на одном или нескольких станках, а также в конструкциях сборочных автоматов и загрузочных устройств, выполняющих переустановку собираемых с двух сторон узлов приборов, механизмов.
Цель изобретения - повышение производительности при расширении технологических возможностей путем обеспечения перехвата деталей.
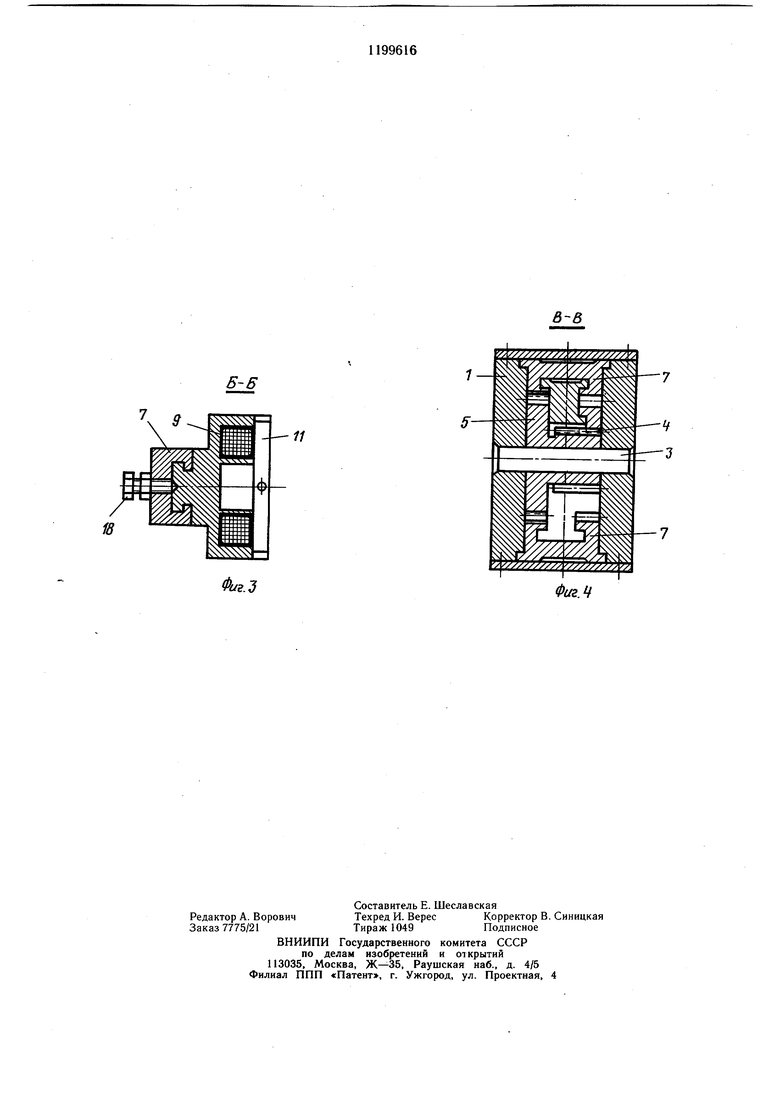
На фиг. 1 изображен предлагаемый схват общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4- разрез В-В на фиг. 2;
Схват робота содержит корпус 1 с размещенны.ми в нем цилиндром 2, осью 3, на которой расположен блок из шестерен 4 и 5, направляющими 6 с установленными в них захватными органами 7, каждый из которых выполнен в виде пластины 8, держателя 9 с электро.магнитом 10 и упором 11, выполненным в виде полукольца, внутренний диаметр которого соответствует наружному диаметру заготовки 12, и на котором закреплен датчик наличия детали, представляющий собой микропереключатель 13. Электромагниты установлены с возможностью взаимодействия с торцовыми поверхностями заготовки, а упоры 11 и микропереключатели 13- .; ее боковой поверхностью. Упоры 11 гарантируют возможность точного перехвата заготовки захватными органами. Каждый из микропереключателей электрически связан с электромагнитом своего захватного органа и с блоком управления робота. На пластинах 8 выполнены рейки 14, которые связаны между собой посредством шестерни 5, а шестерня 4 - с рейкой 15, размещенной в направляющих 16 одной из реек 14 и закреплена на штоке 17.
С целью уменьщения продольного габарита схвата, а также повыщения его быстродействия, система реечных передач выполнена в виде мультипликатора, где диаметр щестерни 4 меньше диаметра шестерни 5.
Переналадка схвата осуществляется путем смены захватных органов, держатели которых установлены в направляющих с фиксацией их винтом 18.
Схват работает следующим образом.
При подаче сжатого воздуха в штоковую полость цилиндра 2 рейка 15, перемещаясь со штоком 17, приводит во вращение блок с шестернями 4 и 5. От вращения шестерни 5 рейки 14 получают продольное перемещение в противоположном направлении, в результате чего происходит сближение захватных органов. Удерживаемая захватным органом 7 заготовка 12, дойдя до упора 11 захватного органа 7, своей боковой поверхностью нажимает на его микропереключатель 13, который переключает электрический ток с электромагнита одного захватного органа на электромагнит другого захватного органа, в результате чего происходит перехват заготовки. После этого заготовка, удерживаемая другим захватным органом уже за необработанную поверхность может быть установлена в патрон того или другого станка.
Применение схвата позволяет расширить технологические возможности робота и увеличить производительность при переустановке.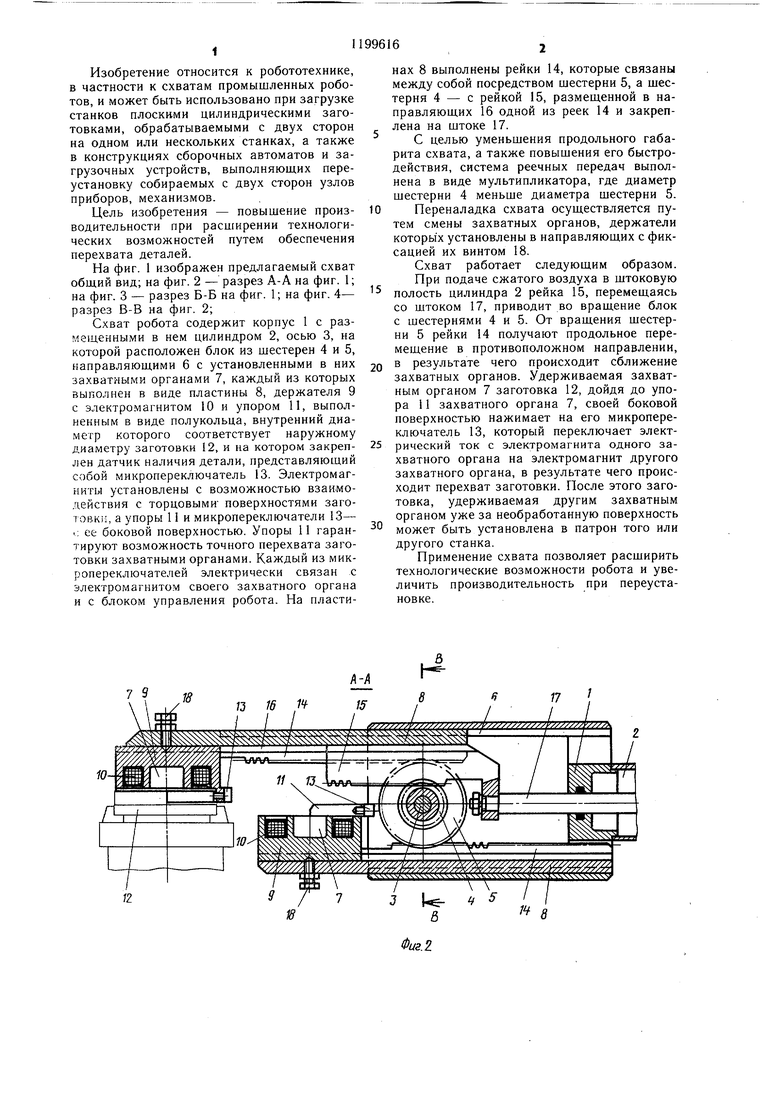
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1987 |
|
SU1516349A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU867481A1 |
| Промышленный робот | 1978 |
|
SU863093A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Захватное устройство | 1988 |
|
SU1521584A1 |
| Устройство для вырубки заготовокиз лиСТОВОгО МАТЕРиАлА | 1978 |
|
SU795962A2 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU899210A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
СХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий установленный в корпусе захватный орган, выполненный в виде закрепленного на пластине держателя с электромагнитом, и привод, отличающийся тем, что, с целью повышения производительности и расширения технологических возможностей путем обеспечения перехвата заготовки, он снабжен дополнительным захватным органом, выполненным аналогично указанному захватному органу и связанным с ним посредством кинематической связи, которая выполнена в виде закрепленного в корпусе блока шестерен и реек, две из которых выполнены на пластинах захватных органов и связаны с одной из шестерен блока, а третья размеш,ена на рейке одного из захватных органов, связана с другой шестерней блока и с приводом, при этом наружная . поверхность каждого захватного органа снабжена упором с микропереключателем.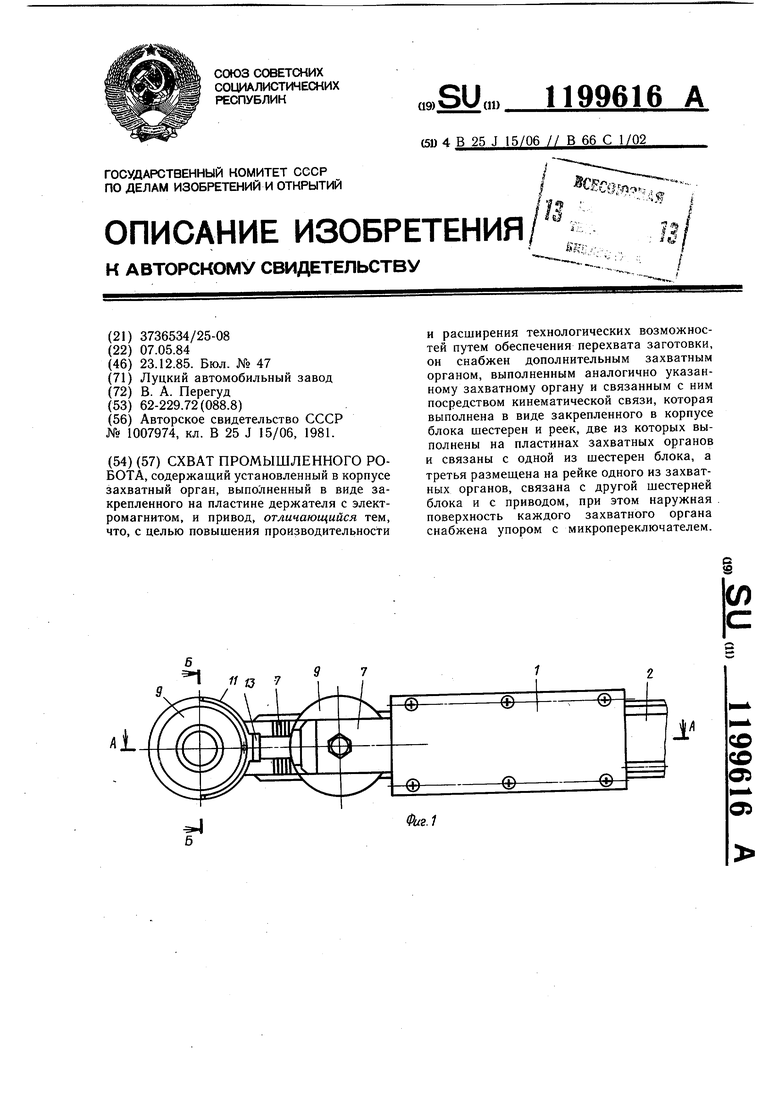
Б-Б
Фиг.д
Фиг. Ц
| Схват | 1981 |
|
SU1007974A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
