(54) ПРО№ШШЕННЫЙ РОБОТ


| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1974 |
|
SU503711A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU867481A1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
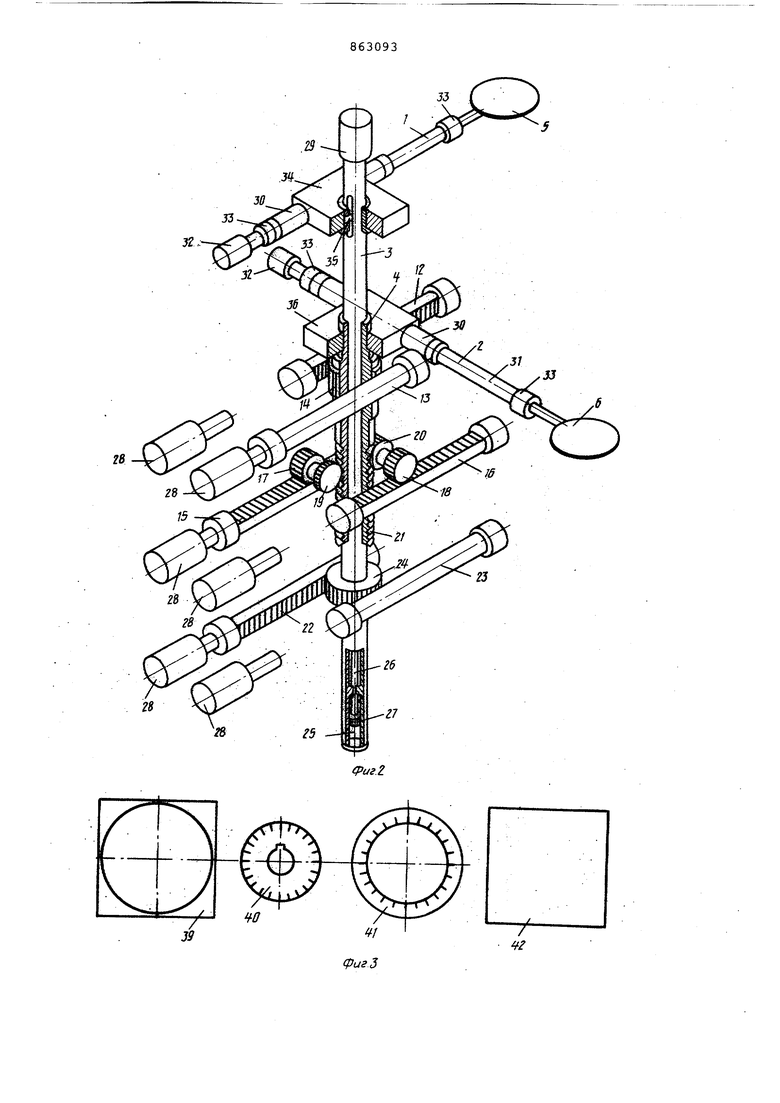
Изобретение относится к машиностроению, в частности к промьшшенным роботам, предназначенным для ме ханизации штамповочных работ. Известен прсниышленный робот, содержгиций две механические руки с захватами, смонтированные в корпусе, вертикально расположенную полую штангу, в полости которой установле nojxueHb со штоком, механизм поворот полой штанги l Недостатком известного промышлен ного 1робота является низкая производительность . Цель нэоСретения - повышение про изводительности. Поставленная цель достигается те что полая штанга закреплена в корпу се неподвижно в вертикальном направ лении, одна из механических рук установлена на полой штанге с возможностью перемещения вдоль нее и связана со штоком, про яышленный робот снабжен дополнительной полой штанго установленной на полой штанге с воз можностью перемещения вдоль нее и оснащенной приводом подъема и приводом ее поворота, а другая механическая рука закреплена на дополнительной полой штанге. Привод подъема дополнительной полой штанги может быть выполнен в . виде двух связанных с силовыми цилиндрами зубчатых реек, входящих в зацепление с шестернями, связанными с шестернями, входящими в зацепление с закрепленной на дополнительной по,лой штанге шестерней, и она выполнена с кольцевыми зубьями. На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 кинематическая схема; на фиг. 3 детали, вырубаемые на прессе; на фиг. 4 - пооперационная схема работы промышленного робота. Промышленный робот содержит две горизонтально расположенные механические руки 1 и 2, вертикально расположенные штанги 3 и 4. На механической руке 1 закреплен плоский электромагнитный захватный орган 5, а на механической руке 2 - плоский электромагнитный захватный орган 6. Штанги 3 и 4 выполнены попыми и установлены в корпусе 7 прс 1шленного робота. В корпусе 7 смонтированы привод 8 поворота и привод 9 прдкъема штанги 4, привод 10 поворота и привод 11 подъема руки 1. Штанга 3 расположена в штанге 4. Привод поворота
штангл 4 содержит два силовых цилиндра, штанги которых выполнены в виде зубчатых реек 12 и 13, входящих в зацепление с шестерней 14, закрепленной на штанге 4. Привод подъема штанги 4 содержит два силовых цилиндра, штоки которых выполнены в виде зубчатых реек 15 и 16, входящих в зацепление, с шестернями 17 и 18.Шестерня 17 связана с шестерней 19, а шестерня 18, связана с шестерней 20.На наружной стороне штанги 4 выполнены зубья 21, входящие в зацепление с шестернями 19 и 20. Привод поворота штанги 3 содержит два силовых цилиндра, штоки которых выполнены в виде зубчатых реек 22 и 23, входящих в запепление с шестерней 24, закрепленной на штанге 3. Привод подъема руки 1 содержит силовой цилиндр 25, корпус которого жестко связан со штангой 3. Шток 26 связан с поршнем 27 и расположен в полости штанги 3. Приводы 8-10 снабжены тормозными устройствами 28, установленными на силовых цилиндрах приводов. Привод 11 сНабжен тормозным устройством 29, размещенным на верхнем конце штанги 3. Механические руки 1 и 2 идентичны по конструкции и содержат силовой цилиндр 30 с полым штоком 31, размещенным эксцентрично по отношению к поршню силового цилиндра 30.Плоские электромагнитные захватные органы 5 и -6 закреплены на одном из концов штоков 31. На другом конце каждого из штоков 31 закреплена штекерная панель 32 для подвода сжатого воздуха. Тормозные устройства 33 размещены на обоих концах штоков 31. Механическая рука 1 закреплена в обойме 34, установленной на штанге 3 с возможностью осевого перемещения и связанной со штоком 26 штифтами 35, расположенными в пазах, вьшолненных в стенках штанги 3. Механическая рука 2 закреплена в обойме 36,смонтированной на штанге 4. Захвдтные органы 5 и б содержат электромагниты 37. Электромагниты 37 захватного органа 5 ориентированы рабочей поверхностью вниз, а одна часть электромагнитов 37 захватного органа б ориентирована рабочей поверхностью вниз, а другая часть - вверх. Промышленный робот предназначен для обслуживания пресса 38 с совмещенным штампом, в котором из одной заготовк 39 вырубают две концентричные детали 40 и 41 и отделяется отход 42. Заготовки 39 укладываются на стол. Силовые цилиндры могут быть выполнены в виде пневмоцилиндров, гидроцилиндров.
Промышленный робот работает следующим образом.
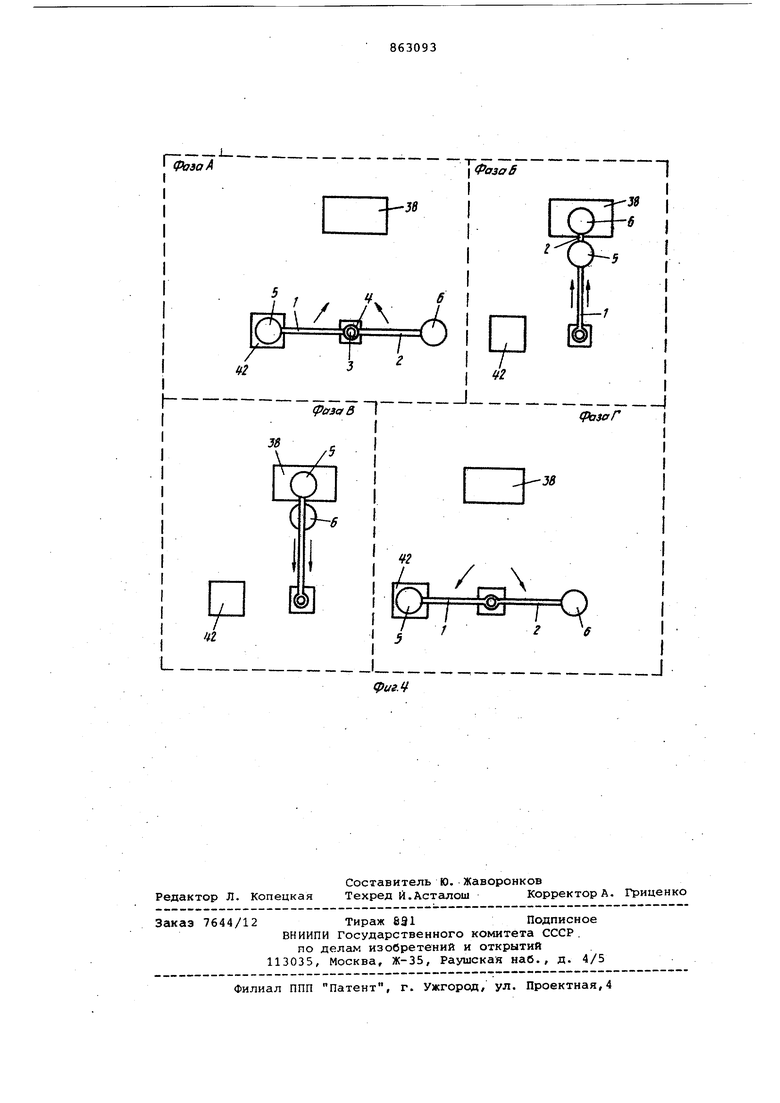
Программа работы для промышленного робота, т.е. последовательность движения механических рук 1 и 2,операций, ими выполняемых, задается коммутационными проводниками на штекерной панели пульта управления прсйлышленным роботом. Эта программа зависит от взаимного расположения обслуживаемых роботом агрегатов, заданного темпа штамповки, количест вырубаемых деталей. Наиболее предпочтительная последовательность двиний и операций, изображенная на фиг.4 (фазы А,Б,В и Г).В фазе А вырубной пресс 38 производит в автоматическом режиме вырубку деталей 40 и 41 из заготовки 39.В это время механические руки 1 и 2 расположенн на одной, прямой, развернуты на 180° и опущены. При этом захватный орган
5механической руки 1 электромагнитами 37 захватывает заготовку 39 со стола, а захватный орган 6 механической руки 2 отпускает отход 42 и детали 40 и 41, вынесенные из рабочей зоны пресса 38. Затем включаются приводы 9 и 11. Штанга 4 и шток 26 поднимаются, а вместе с ними и механические руки 1 и 2. Включают привод 8 и 10, штанги 3 и 4 поворачиваются на 90° так, что механические руки 1 и 2 двигаются навстречу друг другу. В фазе Б механическая рука 2 расположена под механической рукой 1. Подают сжатый воздух в одну из полостей силового цилиндра 30 механической руки 2, шток 31 с захватным органом 6 перемещается в сторону пресса 38. В это же время ползун пресса 38 поднимается. Отход
42 и деталь 41 лежат на зеркале матрицы, а деталь 40 пуансонами штампа поднята над зеркалом матрицы Когда захватный орган 6 входит в рабочую зону пресса 38, механическая рука 2 опускается, и захватный орга
6электромагнитами 37, обращенными рабочей поверхностью вниз, захватывает отход 42 и деталь 41, а на электромагниты 37, обращенные рабочми поверхностями вверх, падает деталь 40. В другую полость силового цилиндра 30 подают сжатый воздух, и захватный орган 6 выдвигается из рабочей зоны пресса 38. В это время захватный орган 5 входит в рабоч зону пресса 38 и опускает заготовки 39 на зеркало матрицы. Затем подается сжатый воздух в полость цилиндра 30 механической руки 1, и захватный орган 5 выходит из рабочей зоны пресса 38. После выхода захватных органов 5 и б из рабочей зоны tipecca 38 включают приводы 8 и 10. Механические руки 1 и 2 начинают порачиваться в разные стороны, и при
их повороте на 90°включ с1ются приводы 9 и 11. Механические руки 1 и 2 опускаются, отключают электромагниты 37 захватного органа 6, и детали 41 и отход 42 подают на оправки (не изображены), а деталь 40 удаляется с электромагнитов 37 удаляющим механизмом (не изображен). В это время производится вырубка деталей 40 и 41 прессом 38 (фаза Г). Затем цикл повторяется. Формула изобретения 1. Промышленный робот, содержащи две механические руки с захватамИ| смонтированные в корпусе, вертикаль но расположенную полую штангу, в полости которой установлен поршень со штоком, механизм поворота полой штанги, отличающийся тем, что, с целью повышения производительности, полая штанга закреплена в корпусе неподвижно в вертикальном направлении, одна из меха ческих рук установлена на полой штанге с возможностью перемещения вдоль нее и связана со штоком, промышленный робот снабжен; дополнительной полой штанг.ой, установленной на полой штанге с возможностью перемещения вдоль нее и оснащенной приводом подъема и приводом.ее поворота, а другая механическая рука закреплена на дополнительной полой штанге. 2. Робот ПОП.1, отличающийся тем, что привод подъема дополнительной полой штанги выполнен в виде двух связанных с силовыми цилиндрами зубчатых реек, входящих в зацепление с шестернями, связанными с шестернями, входящими в зацепление с закрепленной на дополнительной полой штанге шестерней, и она выполнена с кольцевыми зубьями. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 503712, кл. В 25 J 9/00,04.09.74 (прототип).
/
чг
