/
ю
ел
СП
to
СП 00
Изобретение относится к машиностроению и может быть использовано в сборочных машинах, роботах, манипуляторах, транспортных устройствах, автооператорах и других областях народного хозяйства при тран- спортировке грузов с любой формой поверхности.
Целью изобретения является расширение технологических возможностей путем захвата деталей различной формы..
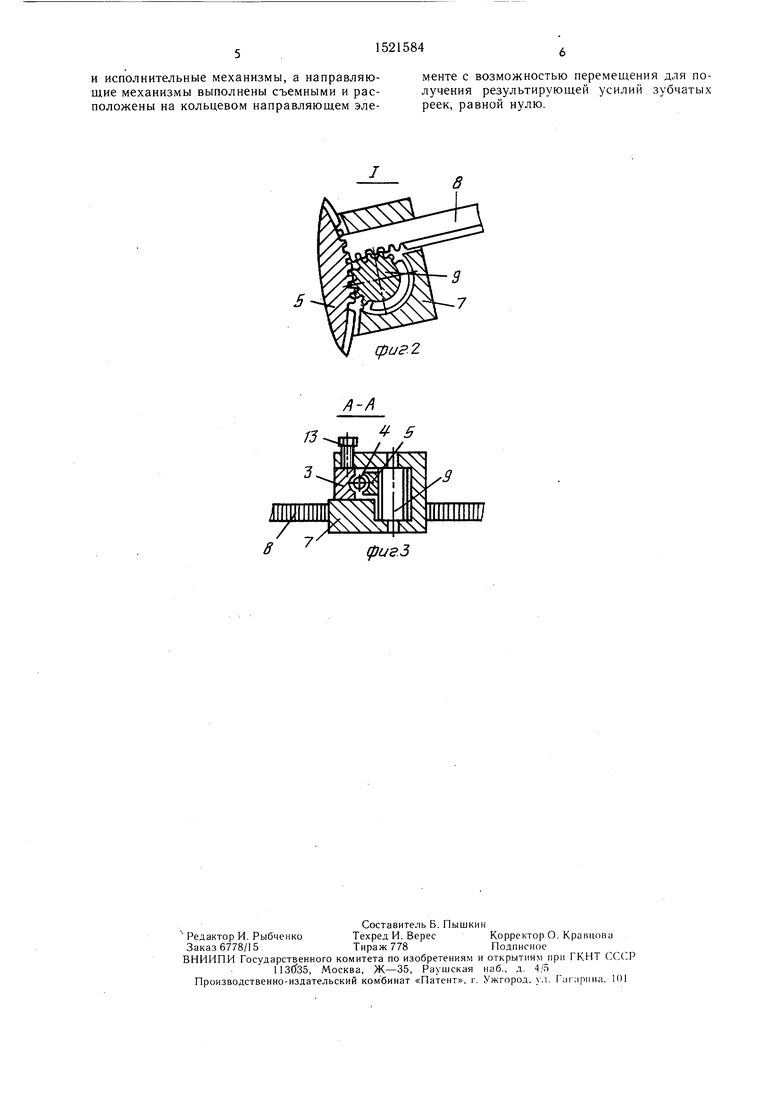
На фиг. 1 изображено захватное устройство; на фиг. 2 - узел I на фиг. 1; на фиг.,3 - разрез А-А на фиг. 1.
Устройство содержит корпус 1, на котором размещен силовой привод 2. К корпусу 1 прикреплен кольцевой наг1равляюш.ий эле- мент 3, на котором с помощью шариков 4 установлен зубчатый венеп5, одна из поверхностей которого выполнена в виде призматической направляющей. Кроме того, на кольцевом направляющем элементе 3 расположе- ны исполнительные механизмы 6. Исполнительный механизм состоит из корпуса 7, являющегося одновременно направляющим механиз.мом зубчатой рейки 8 и щестерни 9. Направляющий механизм предназначен для пере.мещения рейки 8 в определенном неправ- лении, одновременно обеспечивая при этом зубчатое зацепление рейки и Нестерни. При установке исполнительного механизма на направляющем элементе 3 шестерня 9 входит в зацепление с зубчатым венцом 5. Таким образом обеспечивается кинематическая связь зубчатого венца и рейки 8. Посадочное место направляющего механизма на кольцевом направляющем элементе выполнено в виде струбцины, что позволяет быстро устанавливать и снимать исполнительный механизм. Торец рейки 8, обращенный к дета- ли, может быть скругленным, плоским, об- резиненным и т. д. в зависимости от формы зажимаемой детали 10, которая определяет также количество исполнительных механизмов и место их закрепления.
Шток цилиндра 2 соединен с зубчатой рейкой И. Конструкция ее аналогична конструкции рейки 8. Рейка 11 в.ходит в зацепление с шестерней 12. а шестерня 12 зацепляется с зубчатым венцом 5. Количество зубьев шестерен 9 и 12 одинаково.
Возможно исполнение конструкции, при котором зубчатые передачи за.менены фрикционными.
Захватное устройство работает следующим образом. Корпус 1 с помощью подъемно-транспортного механизма, например руки робота, опускается на деталь 10 таким образом, кгобы она оказалась примерно в центре кольцевого ,:1яющего элемента 3. На сило- вой привод 2 (в данном случае пневмо- цилиндр) нодается давление. Шток цилиндра, выдвигаясь, толкает рейку 11. Рейка, нередавая усилие через нлестерню 12 на
зубчатый венец 5, приводит его в движение по кольцевому направляющему элементу 3. Рейка 1 1 продолжает движение вперед до упора в деталь 10. Зубчатый венец 5, поворачиваясь, передает крутящий момент на щестерни 9 исполнительных механизмов 6. Далее усилие передается на рейки 8 и приводит их в движение к центру схвата. Рейки 8 перемещаются одновременно с рейкой 11 до упора в детальУ Ю. После необходимых манипуляций с деталью действие давления на шток в цилиндре 2 меняется и он возвращается в исходное положение, увлекая за собой рейку 11. Зубчатый венец 5 поворчи- вается в обратную сторону, и рейки 8 раздвигаются, освобождая деталь 10.
Диапазон перемещения реек 8 и 11 определяется ходом поршня в цилиндре 2.
Переход на зажим деталей той же конфигурации, но другого размера не требует дополнительной настройки схвата. Переход на зажим детали новой конфигурации сопровождается перестройкой. Для этого надо ос-; лабить болт 13 и, сняв исполнительный механизм с кольцевого направляющего элемента 3, переместить его в новое место и закрепить с помощью болта 13. Место на кольцевом направляющем элементе следует выбирать так, чтобы результирующая сил, создаваемых рейками 8 и 11, была ра&на нулю. В общем случае это происходит, если рейки направлены по нормали к поверхности дета.пи. Количество исполнительных механизмов определяется оператором в зависимости от формы детали.
При настройке на зажим несим.метрич- ных деталей первоначальное положение реек 8 оператор устанавливает на снятом исполнительном механизме, а при установке механизма 6 на кольцевой направляющий элемент 3 в небольщих пределах корректирует положение механизма для обеспечения зубчатого зацепления шестерни 9 и зубчатого венца 5.
Конструкция данного захватного устройства позволяет осуществлять захват деталей различной формы и размеров.
Формула изобретения
Захватное устройство, содержащее корпус, силовой привод, исполнительные механизмы, каждый из которых включает зубчатую рейку, расположенную в направляющем механизме и направленную к центру захвата, связанную через щестерню с силовым приводом, отличающееся тем, что, с целью расщирения технологических возможностей путем обеспечения захвата деталей различной формы, оно снабжено кольцевым направляющим элементом с установленным на нем с возможностью перемещения зубчатым венцом, находящимся в зацеплении с щестернями, связывающими силовой привод
и исполнительные механизмы, а направляющие механизмы выполнены съемными и расположены на кольцевом направляющем элементе с возможностью перемещения для получения результирующей усилий зубчатых реек, равной нулю.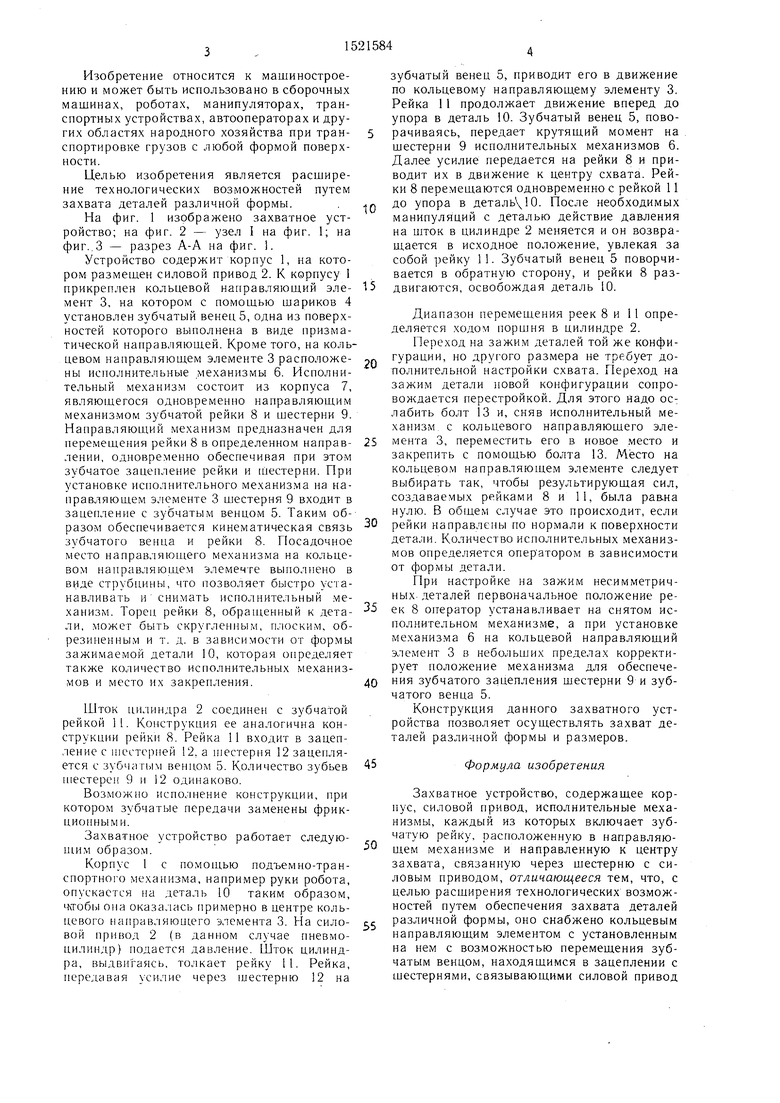
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1093548A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Устройство для захвата деталей | 1979 |
|
SU795942A1 |
| Автооператор | 1983 |
|
SU1073073A1 |
| Схват промышленного робота | 1988 |
|
SU1583287A2 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
Изобретение относится к машиностроению и может быть использовано в сборочных машинах, роботах, манипуляторах, транспортных устройствах, автооператорах и других областях народного хозяйства при транспортировке грузов с любой формой поверхности. Целью изобретения является расширение технологических возможностей путем захвата деталей различной формы. Устройство содержит корпус 1, на котором размещены силовой привод 2 и кольцевой направляющий элемент 3. На кольцевом направляющем элементе установлен с возможностью перемещения зубчатый венец 5. Кроме того, на кольцевом направляющем элементе установлены съемные исполнительные механизмы 6, каждый из которых состоит из корпуса 7, являющегося одновременно направляющим механизмом зубчатой рейки 8 и шестерни 9. Направляющий механизм предназначен для перемещения рейки 8, одновременно обеспечивая зубчатое зацепление рейки 8 и шестерни 9. Направляющий механизм кинематически связан с силовым приводом 2. 3 ил.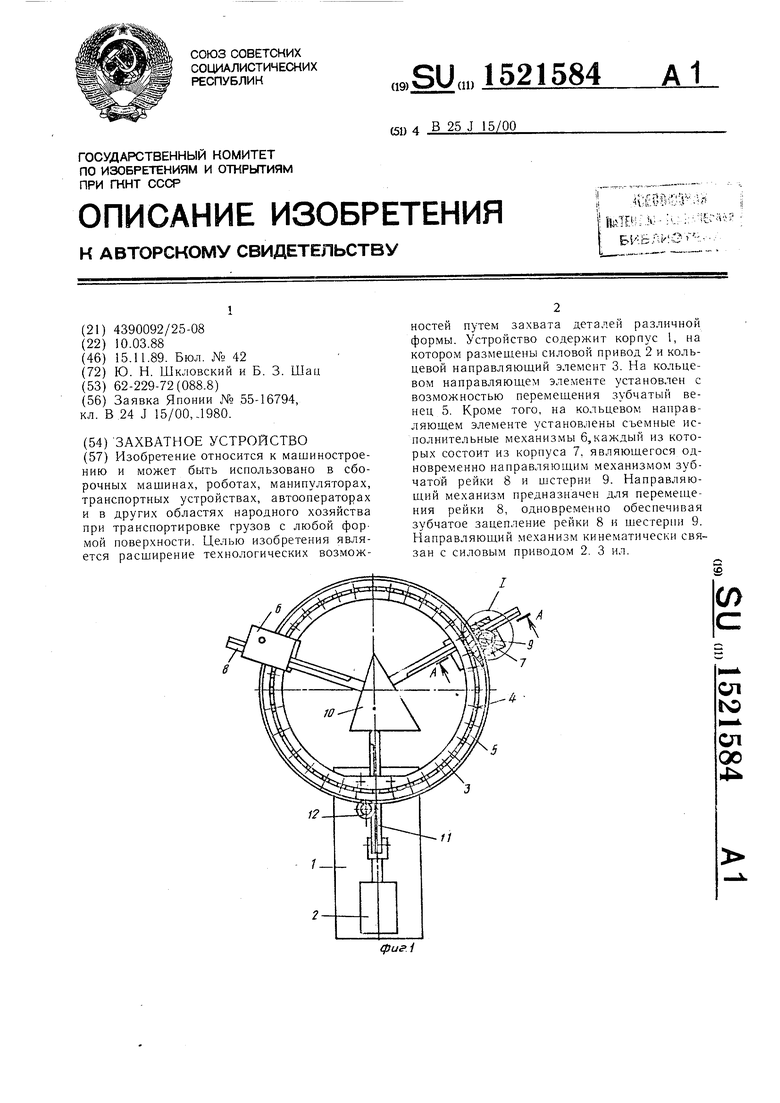
фиг2
фигЗ
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
