fb/ / Л, 13 Ю 8 I
Фиг.1 i S I I
Изобретение относится к области автомобильного транспорта, а именно к приводам управления поворотом двухосной тележки полуприцепов, входящих в состав седельных автопоездов.
Целью изобретения является улучшение управляемости транспортного средства и повышение безопасности путем раздельного поворота колес каждой оси полуприцепа.
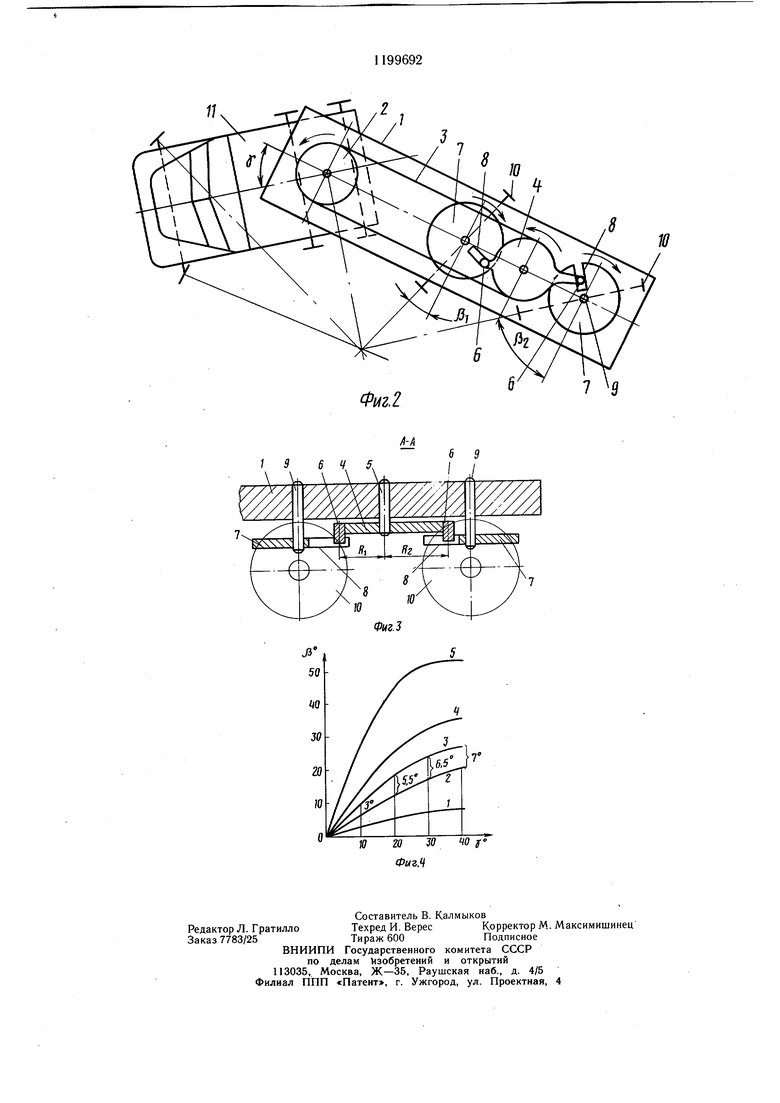
На фиг. 1 изображен привод управления поворотом двухосной тележки полуприцепа при прямолинейном движении автопоезда; на фиг. 2 - то же, при криволинейном движении автопоезда;, на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - график углов поворота осей полуприцепа в зависимости от угла складывания автопоезда при различном расстоянии пальцев от оси ведущего диска.
Полуприцеп 1 имеет привод управления поворотом двухосной тележки, состоящий из задающего диска 2, соединенного посредством тросов 3 с исполнительным диском 4. На исполнительном диске 4, установленном на оси 5, закреплены два пальца 6. С двух сторон исполнительного диска 4 вблизи пальцев 6 установлены дополнительные диски 7 с радиальными пазами 8, закрепленные на осях 9 и связанные с поворотными осями 10 полуприцепа. С полуприцепом 1 кинематически связан тягач 11.
Привод управления поворотом двухосной тележки полуприцепа работает следующим образом.
При входе автопоезда в составе тягача 11 и полуприцепа 1 в поворот происходит изменение угла складывания автопоезда у (угла между продольными осями тягача 11 и полуприцепа 1) в зависимости от изменения радиуса кривизны дороги и на соответствующий угол поворачивается задающий диск 2. Поворот задающего диска 2 трос 3 передается исполнительному диску 4, на котором установлен асимметрично относительно его оси 5 поворота два пальца 6, входящие в радиальные пазы 8 дополнительных дисков 7. Пальцы 6, поворачиваясь вместе с исполнительным диском и взаимодействуя с радиальными пазами 8, поворачивают дополнительные диски 7 И соответствующие им поворотные оси 10 полуприцепа, причем углы поворота f, дополнительных дисков 7 зависят от плеча установки пальцев 6, т. е. от расстояния Ri и R2 .между осью 5 поворота исполнительного диска 4 и соответствующим пальцем 6. Таким образом, если два пальца 6 установлены на исполнительном диске 4 асимметрично относительно оси 5 его поворота, то каждый из дополнительных дисков 7 и соответствующая ему поворотная ось 10 полуприцепа 1 5 повернутся на различный угол i, . Подбором расстояний от оси 5 поворота исполнительного диска 4 до места установки пальцев б Ri, R2 можно достигнуть любой желаемой разницы углов поворота PI и Р2 поворотных осей 10 полуприцепа 1.
0 При такой конструкции привода управления достигается изменение разности углов поворота поворотных осей 10 полуприцепа 1 в процессе поворота в зависимости от изменения радиуса поворота. Это достигается
, тем, что во время взаимодействия в процессе поворота пальцев 6 с радиальными пазами 8 дополнительных дисков 7 пальцы 6, поворачивая дополнительные диски 7, в то же время скользят вдоль радиальных пазов 8, при этом меняется радиус обкатки дополнительных
0 дисков 7, т. е. расстояние от осей 9 поворота дополнительных дисков 7 до пальцев 6, соответственно меняется в процессе всего поворота соотношение углов поворота и дополнительных дисков 7 в зависимости от поворота исполнительного диска 4. Графически
5 это проиллюстрировано (фиг. 4) на примере двухосной тележки с расстоянием между осями исполнительного диска 4 и каждого из дополнительных дисков 7, равным 1000 мм, и расстоянием R между осью 5 поворота исполQ нительного диска 4 и пальцем 6 200 мм (график 1); 400 мм (график 2), 500 мм (график 3), 600 мм (график 4) и 800 мм (график 5), где Y - УГОЛ складывания автопоезда и соответственно угол поворота задающего диска 2; р - угол поворота дополнительного диска 7 и соответствующей оси полуприцепа 10.
Разность углов поворота дополнительных дисков 7 при различном расположении каждого из соответствующих пальцев 6 от оси 5 поворота исполнительного диска 4 возрастает
с увеличением угла складывания автопоезда, что обеспечивает лучшую вписываемость автопоезда. Например, при расстоянии R 400 мм между одним из пальцев 6 и осью 5 поворота исполнительного диска 4 (соответствует графику 2 на фиг. 4) и 500 мм между другим пальцем 6 и осью 5 (соответствует графику 3 на фиг. 4) и при угле складывания автопоезда f 10° разница углов поворота дополнительных дисков 7 составит 3°, при угле складывания автопоезда 20°
Q эта разница возрастает до 5,5° и при угле, складывания 30° она составит 6,5°.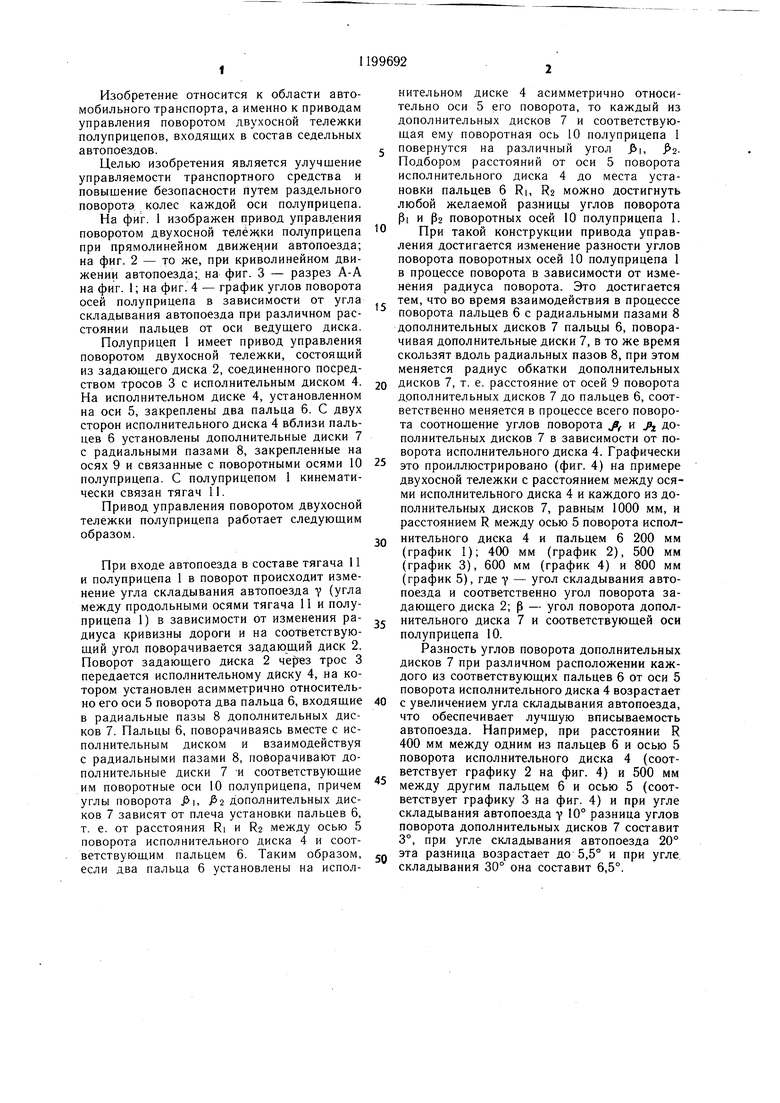
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство | 1987 |
|
SU1428651A1 |
| Привод управления поворотными тележками полуприцепа | 1977 |
|
SU709449A1 |
| Устройство для управления поворотом двухосной тележки полуприцепа | 1985 |
|
SU1273288A1 |
| Автопоезд | 1988 |
|
SU1676907A1 |
| Привод управления поворотом транспортного средства | 1987 |
|
SU1533932A1 |
| Устройство для поворота колес полуприцепа транспортного средства | 1978 |
|
SU747764A1 |
| Устройство управления автопоездом | 1988 |
|
SU1655833A1 |
| Устройство для управления колесами полуприцепа | 1979 |
|
SU856883A1 |
| Способ управления поворотом полуприцепа с блокируемой тележкой и устройство для его осуществления | 1980 |
|
SU925726A1 |
| Система рулевого управления многозвенного большегрузного седельного автопоезда | 1988 |
|
SU1664643A1 |
ПРИВОД УПРАВЛЕНИЯ ПОВОРОТОМ ДВУХОСНОЙ ТЕЛЕЖКИ ПОЛУПРИЦЕПА, содержащий задающий диск, закрепленный на тягаче, и исполнительный диск, установленный на полуприцепе с возможностью его поворота относительно рамы полуприцепа, соединенные между собой посредством тросов, отличающийся тем, что, с целью улучщения управляемости транспортного средства путем раздельного поворота колес каждой оси полуприцепа, он снабжен двумя связанными с поворотными осями полуприцепа дополнительными дисками с выполненными в них радиальными пазами и двумя пальцами, закрепленными на исполнительном диске асимметрично относительно его оси для взаимодействия с радиальными г пазами дополнительных дисков. kA)
| Устройство для поворота колес полуприцепа транспортного средства | 1978 |
|
SU747764A1 |
| В | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
