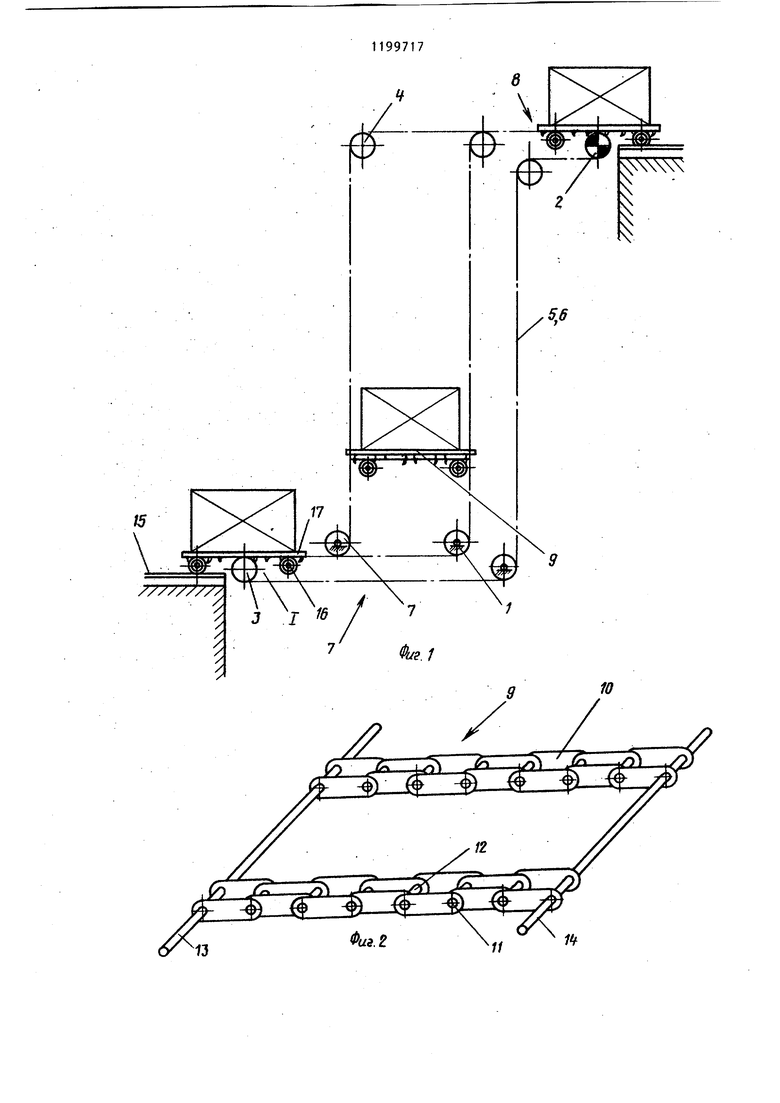
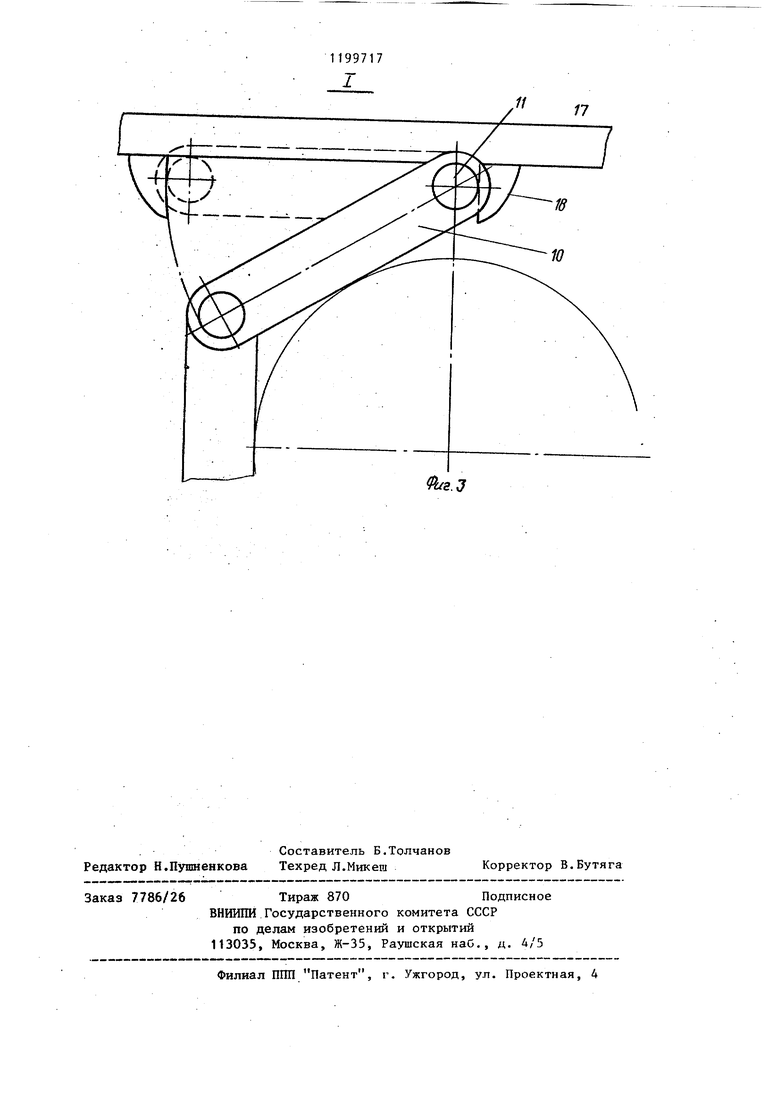
Изобретение относится к промышленному транспорту, а именно к конвейерной системе для вертикального и горизонтального транспортирования штучных грузов. Целью изобретения является повышение надежности. На фиг. 1 изображена конвейерная система, общий вид; на фиг. 2 грузонесущая платформа конвейерной системы, общий вид; на-фиг. 3 узел 1 на фиг. 1. Конвейерная система для вертикал ного и горизонтального-транспортирования грузов включает раму 1, на которой установлены приводные 2, натяжные 3 и отклоняющие 4 звездочки, огибаемые двумя парами внешними 5 у внутренними 6 параллел но расположенные бесконечно замкнутыми тяговыми цепями с нижним 7 и верхним 8 горизонтальными участками Грузонесущие платформы 9 выполнены из звеньев 10 пластинчатых цепей, шарнирно соединенных осями 11 со втулками 12 друг с другом и со штангами, одна из которых 13 прикреплена к внешней 5, а другая 1.4 к внутренней 6 паре тяговых цепей. У нижнего 7 и верхнего 8 горизонтальных участков расположены приемно-подающие механизмы, выполненные из направляющих путей 15 и опорных колес 16, прикрепленных к поддонам 17 с возможностью обкатыва ния по направляющим путям 15. На днищах поддонов 17 закреплены упоры 18, выполненные в виде полусерпов, попарно обращенных друг к другу вогнутыми сторонами с возможностью взаимодействия со втулками 12 звень 10 грузонесущих платформ 9. Упоры 18 расположены с шагом, ра ным ,) шаг закрепления упоров-, шаг звеньев грузонесущей платформы 3 в - диаметр втулок на осях звеньев грузонесущей плат формы, 172 а расстояние между упорами в каждой их паре равно: ,0, где ij, - расстоян ие между упорами в каждой паре. Вогнутые стороны упоров выполнены по радиусу , + 0.5dg. Поддон 17 с грузом подается по направляющим путям 15 к месту погрузки. Грузонесущая платформа 9 на участке погрузки огибает натяжную звездочку 3 и в момент выхода первой пиры втулок 12 звеньев 10 грузонесущей платформы 9 на горизонтальный участок происходит зацепление этих втулок 12 упорами 18 поддона 17. При.дальнейшем оги- бании грузонесущей платформой 9 натяжной звездочки 3 и выхода второй пары втулок 12 звеньев 10 грузонесущей платформы .9 на горизонтальный участок эти втулки 12 замыкаются упорами 18 поддона 17. Таким образом, первая пара звеньев 10 грузонесущей платформы 9 оказывается жестко замкнутой двумя упорами 18. По мере перемещения грузонесущей платформы 9 и выхода ее звеньев 10 на горизонтальный участок вертикального конвейера поддон 17 последовательно с помощью упоров 18 жестко закрепляется на грузонесущей платформе 9. Грузонесущая платформа 9 с установленным на ней поддоном 17 с грузом перемещается по трассе вертикального конвейера к месту выгрузки. Съем с грузонесущей платформы 9 поддона 17 с грузом и их дальнейшая транспортировка по направляющему пути 15 происходит в порядке, обратном процессу загрузки их на конвейер.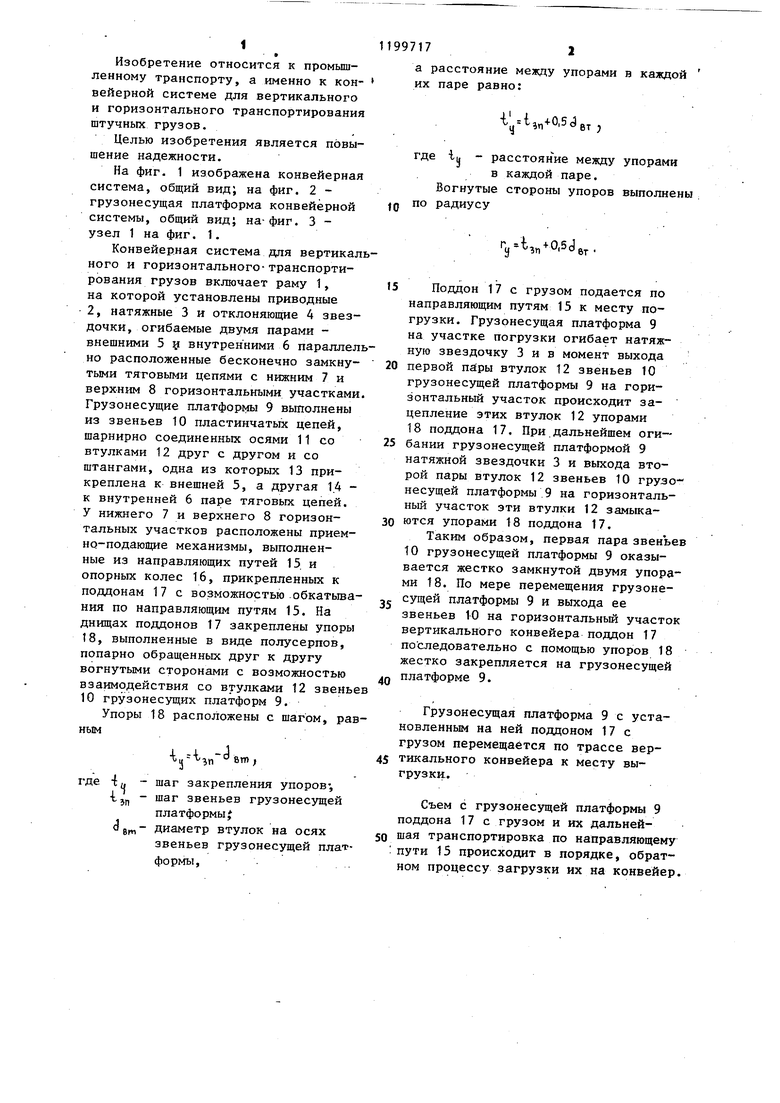
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1982 |
|
SU1071537A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1972 |
|
SU466157A1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1995 |
|
RU2083454C1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 2002 |
|
RU2240968C2 |
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |
| Вертикальный конвейер для штучных грузов | 1988 |
|
SU1549863A1 |
| Вертикально-замкнутый тележечный конвейер | 1986 |
|
SU1375531A1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1994 |
|
RU2068381C1 |
| Грузоподъемная платформа крана-штабелера | 1987 |
|
SU1416386A1 |
1. КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ, включающая раму, на которой установлены приводные, натяжные и отклоняющие звездочки, огибаемые двумя парами внешних и внутренних параллельно расположенных бесконечно замкнутых тяговых цепей с нижним и верхним горизонтальными участками, грузонесущие платформы, выполненные из звеньев пластинчатых цепей, шарнирно соединенных осями со втулками друг с другом и со штангами, одна из которых прикреплена, к внешней, а другая - к внутренней парам бесконечно замкнутых тяговых цепей, и приемно-подающие механизмы, смон- тированные у концов нижнего и верхнего горизонтальных участков и имеющие поддоны для груза, отличающаяся тем, что, с целью повышения надежности в работе, поддоны для груза снабжены жестко прикрепленными к их днищам упорами, выполненными в виде полусерпов, попарно обращенными друг к другу вогнутыми сторонами, с возможностью взаимодействия со втулками звеньев грузонесущих платформ, при этом упоры расположены на днищах поддонов с шагом, равным . , с где 1,; - шаг звеньев грузонесущей « платформыi (Л диаметр втулок на осях звеньев грузонесущей платформы, а расстояние между упорами в каждой их паре равно ,. со со 2. Система по п. 1, отличающаяся тем, что вогнутые стороны упоров выполнены по радиусу .SJe. 3. Система по п. 1, отличающаяся тем, что приемноподающие механизмы выполнены из направляющих пУтей и опорных колес, прикрепленных к поддонам с возможностью обкатывания по направляющим путям.
| Спиваковский А.О | |||
| и др | |||
| Транспортирующие машины | |||
| М.: Машиностроение, 1983, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 0 |
|
SU198225A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
