Изобретение относится к механизации погрузочно-разгрузочныХ и транспортных работ, а именно к системам управления приводами подъемником с уравновешиванием груза, и является дополнительным к изобретению по авт.св. № 655638.
Цель изобретения - повьппение надежности системы при работе ее в запыленной среде.
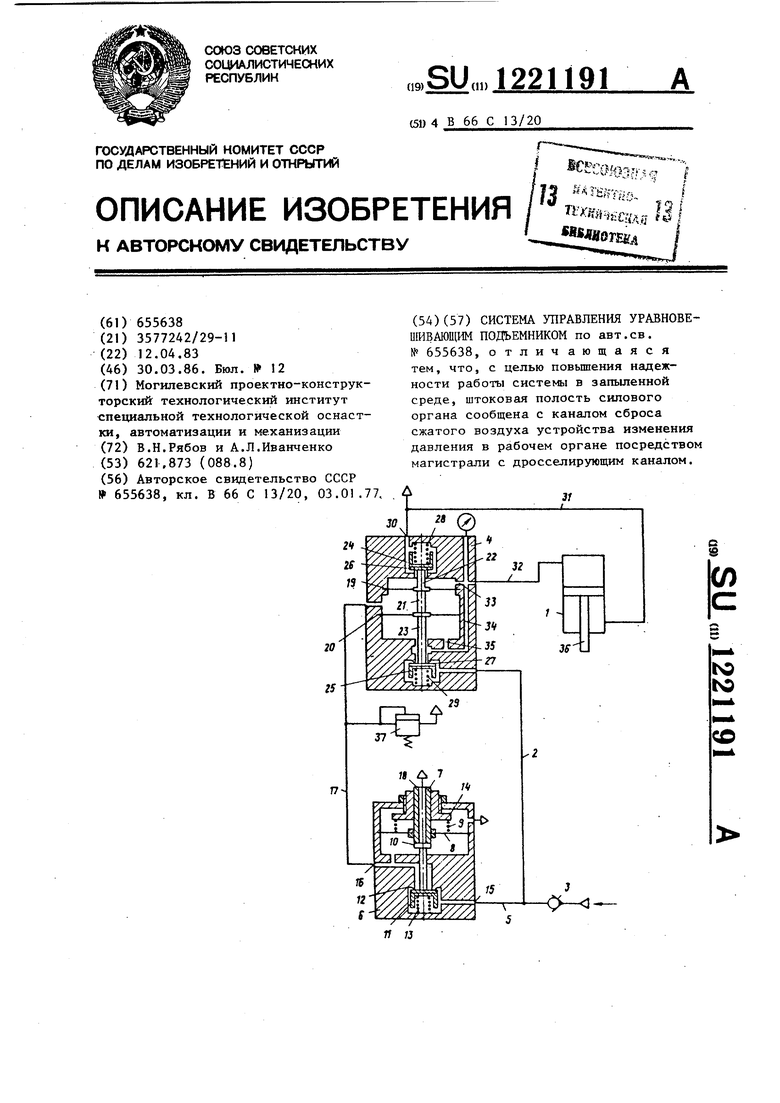
На чертеже схематически показана система управления уравновешивающим подъемником.
Система управления уравновешивающим подъемником содержит силовой орган, представляющий собой пневмо- цилиндр 1, соединенный напорной магистралью 2 с источником сжатого вохдуха ( не показан).В магистрали 2 установлен обратный клапан 3 и уст- ройство изменения давления 4 в рабочем органе. От магистрали 2 ответвляется магистраль 5 управления, в которой установлен датчик веса 6. Датчик веса 6 соединяется с грузо- захватным органом (не показан. Датчик веса 6 имеет толкатель 7, взаимодействующий с грузозахватным органом и мембраной 8, которая поджимается пружиной 9 к клапану 10. Кла- пан 10 упирается в дополнительный клапан 11, который прижат к седлу 12 пружиной 13. Резьбовая втулка 14 является направляющей дпя толкателя 7. Она же служит для регулиров- ки усилия пружины 9. Датчик веса 6 имеет камеру давления, канал 15 входа рабочего тела из магистргши 5, канал I6 выхода в магистраль 17 и канал 18 сброса рабочего тела, в частности воздуха, в атмосферу.
Устройство изменения давления 4 содержит две мембраны 19 и 20, разделяющие полость устройства изменен давления 4 на три камеры. Мембраны 19 и 20 закреплены на толкателе 21, который своими концами 22 и 23 упирается соответственно в клапаны -24 и 25, которые прижимаются соответственно к седлам 26 и 27 пружинами |28 и 29. Канал 30 устройства изменения давления 4 соединяется через магистраль 31 с дросселирующим каналом со штоковой полостью пневмо- цилиндра 1. Бесщтоковая полость пневмоцилиндра 1 соединяется магистралью 32 с каналами 33 - 35. Пневмо- цилиндр связан с исполнительным ме
5 0 5 О с л
5
0
191
ханизмом через шток 36. В магистрали управления 17 за датчиком веса 6 . установлен предохранительный клапан 37.
Система управления уравновешивающим подъемником работает следующим образом.
Вес грузозахватного органа уравновешивается усилием пневмоцилиндра 1, развиваемым за счет давления рабочего тела. При этом управление давлением в пневмоцилиндре 1 осуществ- ляеься следующим образом. Воздух через обратный клапан 3 поступает в магистраль 2 и магистраль 5. Воздух поступает по магистрали 5 управления, попадает по каналу 15 в полость, занимаемую клапаном 11. Грузозахватный орган воздействует на толкатель 7, находящийся в резьбовой втулке 14 и имеющий канал 18 сброса воздуха в атмосферу. Толкатель 7 прогибает мембрану 8, поджимаемую пружиной 9 к клапану 10. Последняя перемещает клапан 10, а тот, в свою очередь, открывает дополнительный клапан 11, прижимаемый пружиной 13 к седлу 12. Воздух по каналу 16 поступает в камеру датчика веса 6 и через магистраль 17 - в камеру устройства изменения давления 4 до тех пор, пока он не уравняет вес груза, т.е. вернет в исходное положение мембрану 8 и клапан 11, перекроет доступ воздуха по каналу 15. Воздух, поступающий в камеру устройства изменения давления 4, служащегр для усиления по мощности сигнала, полученного от датчика веса 6, перемещает толкатель 21, взаимодействующий концом 23 с клапаном 25 в сторону клапана 25, прижимаемого пружиной 29 к седлу 27, так как мембрана -20 имеет большую площадь, чем мембрана 19. Клапан 25 под действием толкателя 21 открьшается и воздух по каналам 35,34 и 33 поступает в камеру, а также по магистрали 32 в рабочую полость пневмоцилиндра 1 до тех пор, пока давление во всех камерах не сравняется. Когда давление в камерах устройства изменения давления 4, а следовательно, и в камере датчика веса бив полости пневмоцилиндра 1 станет одинаковым, толкатель 21 под действием мембран 19 и 20 вернется в исход31
ное положение, клапан 25 закроется и прекратит подачу воздуха.
Таким образом, в рабочей полости пневмоцилиндра 1 создается давление, необходимое для создания усилия, уравновешивающего грузозахватный орган, воздействующий на толкатель 7
При перемещении штока 36 пневмоцилиндра 1 вверх или вниз происходит автоматическая подстройка системы, когда шток 36 перемещается в бесштоковую полость, давление в этой полости в одних камерах устройства изменения давления 4 возрастет и станет больше, чем в другой его камере. Это приведет к тому, что толкатель 21, взаимодействующий конп цом 22 с клапаном 24 переместится в сторону клапана 24 и откроет его. Воздух из камер устройства 4 пойдет в полость, занимаемую клапаном 24. а из него по каналу 30 - в атмосфе21191
ру до тех пор, пока давление в указанных камерах не сравняется. При этом часть воздуха по каналу 31 поступает в штоковую полость пневмо- 5 цилиндра 1, компенсируя тем самым разрежение, создающееся в этой полости за счет движения поршня. Магистраль 31 имеет сопротивление большее, чем канал 30. За счет этого to давление в штоковой полости значительно меньше давления, возникающего в канале 30 при выходе воздуха в атмосферу. Предохранительный клапан 37 предназначен для сброса дав- 15 ления в магистрали 17 в случае поднятия груза, превьшгающего номинальную грузоподъемность.
Таким образом, система управления I. 20 уравновешивающим подъемником, имеет сравнительно высокую надежность работы в запыленной среде.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Устройство для управления уравновешивающим стреловым подъемником | 1988 |
|
SU1650561A1 |
| Устройство для управления пневматическим уравновешивающим стреловым подъемником | 1984 |
|
SU1328279A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
