Предпагаемое изобретение относится области механизации погруэочно-разгрузо и транспортных работ, а именно, к приводам подъемников с уравновешивание груза, преимущественно пневматическим. Известна система управпенин уравновешяваюшим подъемником, содержащая источник сжатого воздуха, соединеннь й с сиповым органом посредством напорной магистрали, в которой /становпено устро ство изменения давпения в сиповом ор- гане, соединенное с магистралью управ™ пенпя, снабженной датчиком веса, имеку щим камеру давпения с каналами входа и сброса сжатого воздуха, отдепенными друг от друга кпапаном, взаимодействующим с мембраной И . К недостаткам описанной системы отно сится; а)- Датчик веса устаковтшн параппепьно магистрапи управпения, т.е. он имеет топько один канап входа р очего тепа (он же явияется ч канапом выхода), а noTOfviy он работает на принципе постоянного истечения в атмосферу рабочего тепа превышающего объем, необходимый дня создания требуемого давпения в регуляторе давления. Для ограничения потерь рабочего тела, в магистрапн управпения перед датчиком веса установпен дроссепь. Это приводит,во-первых, к снижению скорости срабатывания системы, а во-вторых, к понижению точное- ти и стабильности ее иэ-оа постоянно существующих изменений давления в силовой магистрали, т.е. к понижению надежности системы управления. б)Постоянное истечение рабочего тела через датчик веса приводит к понижению кинематической жесткости системы, что в свою очередь приводит к понижению точности и. стаб(шьности последней, т.е. снижению ее надежности. в) в магистрали управления дополнительного элемента-дросселя, а также постоянное истеченне рабочего тепа через датчик веса, приводнт к из-
пишним потерям мощности, т.е. сниженшо КПД системы.
Целью изобретения Евпяется повышение надежности системы управления уравновешивающим подъемником и сни«жениё потерь мощности.
Для этого датчик веса и устройство .изменения давпения в силовом органе установпены в магистрапи управпения поспедоватепьно, а датчик веса вьшопнен с канапом выхода из камеры давления Б магистраль и снабжен дополнительным кпапаном, отделяющим эту камеру от канала входа.
Пример осуществления изобретения схематично показан на чертеже, где; на фнг. 1 - уравновешивающий подъемник; на фиг, 2 - система управпешш ,пoдъe {i
НИКОМ.
Уравновешивающий подъемник содержит грузовую стрепу 1, например, в виде шарнирного параппепограмма, закрепленную на стойке. 2. На стреле закреплен грузовой рычаг 3, на конце которого размещен грузозахватный орган 4, На противопопожном конце стрелы закреппен противовес.5.
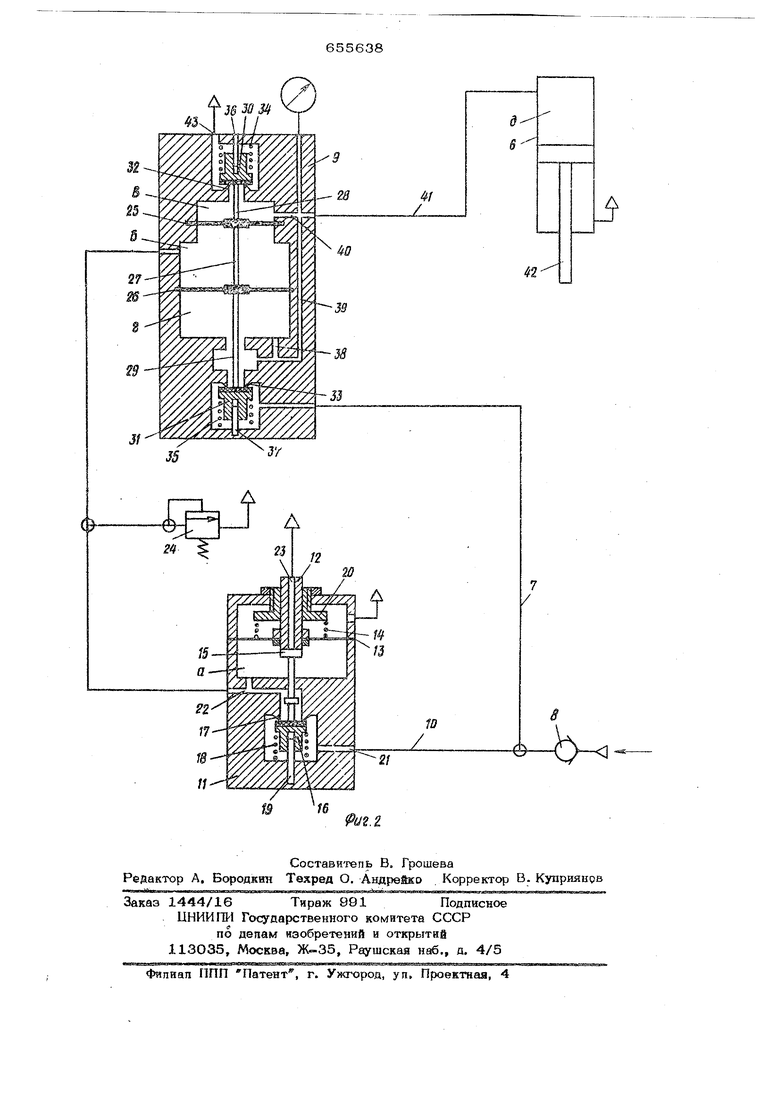
Грузовая стрела связана с силовым органом 6, например, пневматическим, Шпквдр соединен напорной магистрапыо 7 с источником мощности (на чертеже не показан), В напорной магистрали уотановпен обратный клапан 8 и устройс-г во изменения давпения 9 в рабочем органе От напорной магистрали ответвляется магистрапь управпения 10, в которой установпен датчик веса 11. Датчик веса размещен на конце грузового .рычага 3, между последним и гузозахва иым органом 4.
Датчик веса 11 имеет толкатель 12, взаимодействующий с грузозахватным органом 4, и мембрану 13, которая поджимается пружиной 14 к клапану 15. Кпапан 15 упирается в дополнитепьный кпапан 1-6, который прижат к седлу 17 пружтшй 18, Дополнительный клапан 16 имеет направляющий стержень 19. Резьбовая втулка 20 является направпйющей дпй толкатели 12. Ояа же служит дня регулировки натяга пружины 14 Датчик вмвет давления нап 21 входа рабочего тепа аз магисг рапи, канал 22 выхода в магистраль и канап 23 сброса рабочего тепа, в част ности, воздуха в.атмосферу. Канал отделен от каьдары а кпапаном 16, а канал сброса Ю1а11аном 15. В магистрапи управления за датчиком веса установлен предохраните пьный клапан 24. - Устройство изменетгия давления 9, служащее для усипения по мощности сиг S нэпа, полученного от датчика веса 11, содерншт две мембраны 25 и 26, раз™ депяюшке полость усгройства на три камеры б
Мембраны 25 и
26 неподвижно закреплены на топкат-е- ле 27, который своими концами 28 и 29 упирается соответственно в клапаны ЗО и 31, которые прижимаются соответст BeiiHo к седлам 32 и 33 пружинами 34 и 35 и напршзляются стерЖ1шми 36 и 37.
Уравновешивающий подъемник работа ет следующим образом,.
Вес грузозахватного органа 4 без груза или с грузом 13 уравновец явается
усилием силового органа 6, развиваемого за счет давления рабочего тела. Opvi этом управление давлением рабочего тела в силовом органе осуществляется следующим образом. Рабочее тело, в частности
S сжатый воздух, через обратньгй клапан 8 поступает в силовую магистраль 7 и магистраль управпения 10, Вогздух, по ступающий .ПО магистрали 10, попадает по каналу 21 в полость клапана 16. Вес
груза 13 и грузозахватного органа 4 воздействует, на толкатель 12, который прогибает г мег1/йрану 13. Послед1{яя заставляет перемещаться клапан 15, а тот, в свою очере.ць, открывает клапан
3 16. Воздух по каналу 22 поступает в камеру а датчика веса и в камеру б устройства 9 до тех пор, пока он не уравновесит вес груза, т.е. вернет в исходное положение мембрану 13, посла чего кла-
пан 16 перекроет доступ воздуха по вход ному какаду 21,
Воздух, поступающий в камеру б устройства изменения давления, перемещает толкатель 27 в сторощ - клапана 31, т.к. мембрана 26 имеет больщую площадь, чем мембрана 25. Клапан 31 под дейстаием толкателя 27 открывается и воздух по KaHBiiy 38 поступает в камеру г, по каналам 39« 4О в камеру в, а по каналу 4-1 в полость л силового органа 6 до тех пор, пока давление во всех камерах не сравняетса. Когда давление в камфах 6, ъ и г устройства изменения давяе ния, а следовательно и в камере в. дат чика веса, и в полости и цилиндра станет одинаковым, тодкатепь 27 под действием Мембран 25 и 26 вернется в 5 исходное noiio KeHvie, клапан 31 закроетс и прекратит подачу воздуха. Таким обр зом, в рабочей полости д циливдра 6 создается давпенне, необходимое для создания штоком 42 усилия, уравновешивающего вес грузозахватного органа 4 11 груза 13, воздействующих на толк.этепь 12 датчика веса. Груз, уравповешен Ый посредством . силового органа, перемешается оператором вручную. При изменении угла наклон стрелы 1 происходит автоматическая под настройка системы. При этом может возникнуть момент, когда шток 42 сило вого органа 6 при движении стрепы 1 будет вдвигаться в полость д. Давление в попости Tl , а также в камерах в и г устройства изменения давления связанных между собой каналами, возрастет и станет больше, чем в камере б. Это приведет к тоглу, что топкатепь 27 переместится в сторону клапана ЗО и откроет его. Воздух из камер в, г и д пойдет в полость клапана 30, а из него ло каналу 43 в атмосферу до тех пор, пока давление в камерах в, г и д не станет равньш давлен1по в камере б, Есия шток 42 движением стрепы вы двигается из попости д, т,е. давление в последней уменьшается, а соответственно уменьшается давление в камерах в и г. Давление в камере б, связанной с датчиком веса, остается прен«ним. Толкатель 27 начнет перемешаться
ФигЛ 38 в сторону клапана 31 и откроет его. Воздух из силовой магистрали 7 поступает в камеры в и г и полость д до тех пор, пока давление в них не сравняется с давлением в камере б. мупаизобретения Система.управления уравновешиваю- цим подъемником, содержащая источник сжатого воздуха, соединенный с силовым органом ,посредством напорной магистрали, в которой установпено устройство изменения давления в силовом органе, соедине1шое с магистралью управления, снабженной датчиком веса, имеющим камеру давления с каналами входа и сброса сжатого воздуха, отделенными друг от друга клапаном, взанмодейсгвующим с мембраной, о г л и ч а ю щ а я с я тем, что, с цепью повышения надежности и снижения потерь мсщноо ти, датчик веса и устройство изменения давления в силовом органе установпены в магистрали управления посп§дователь но, а датчик веса выполнен с канапом выхода из камеры давления в магист раль и снабжен дополнительным кпапаном, отпеляюшим эту камеру от канала входа. Источники информации, прц5штые во внимание при экспертизе: 1. Патент Англии № 1221О47, кл. В 8 В от 1971.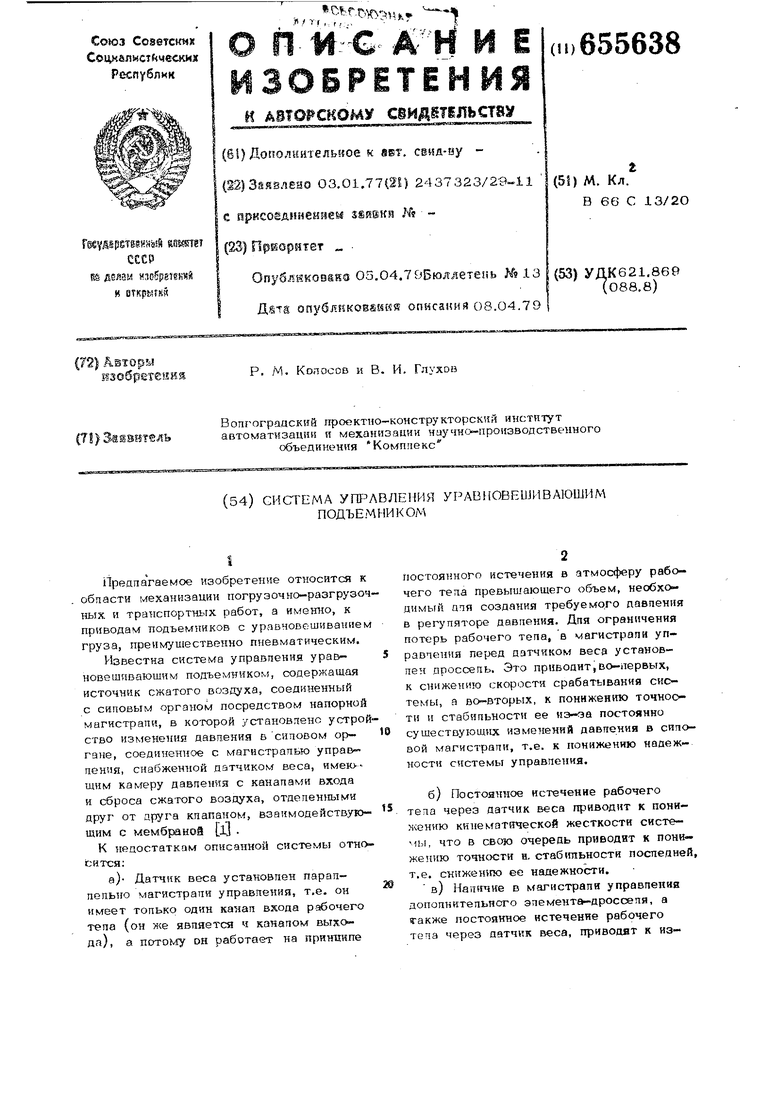
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Система управления уравновешивающим подъемником | 1983 |
|
SU1221191A2 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Система управления уравновешивающим подъемником | 1980 |
|
SU895904A2 |
| Уравновешивающий подъемник | 1984 |
|
SU1184799A1 |