Изобретение относится к станкостроению, а более конкретно к устройствам автоматической загрузки технологических машин штучными изделиями типа тел вращения.
Целью изобретения является упрощение конструкции путем размещения захватов и механизмов вторичной ориентации в ползунах ротора.
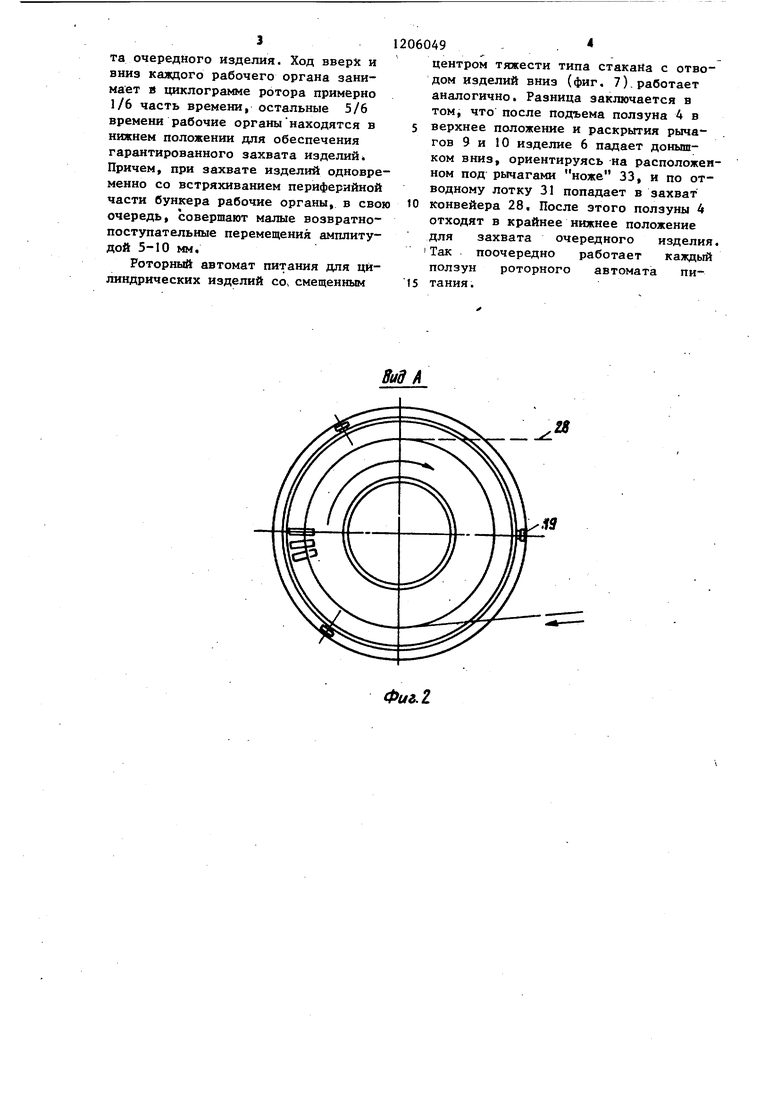
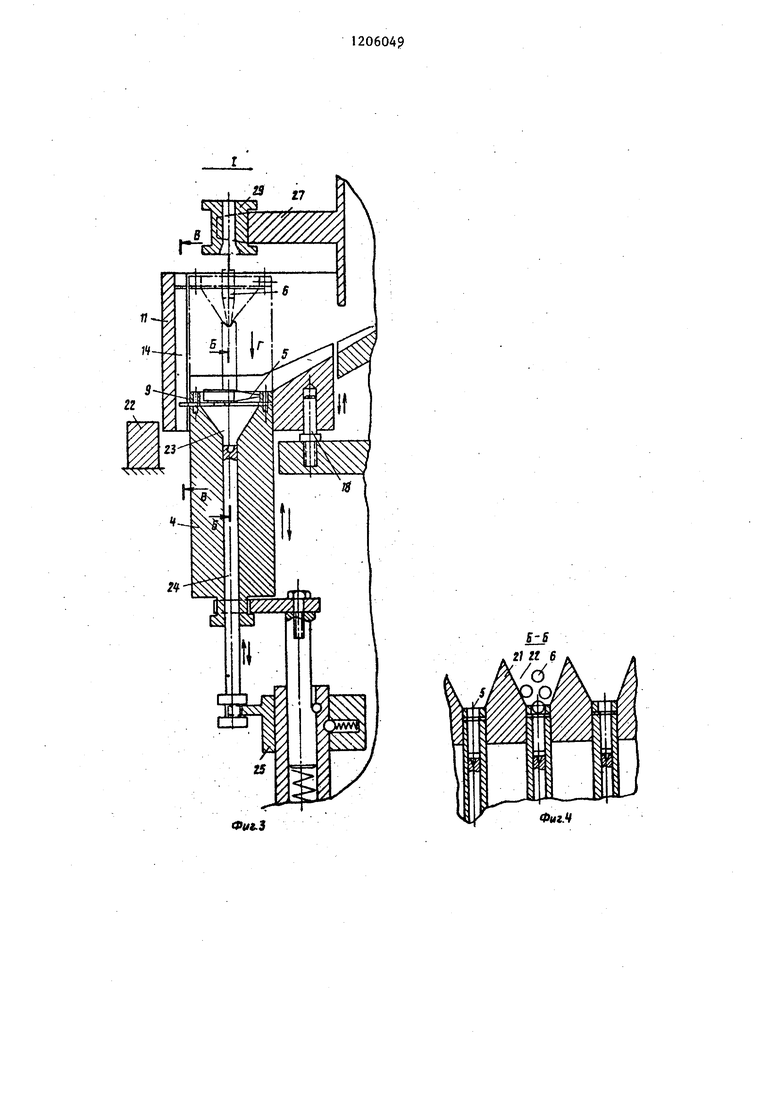
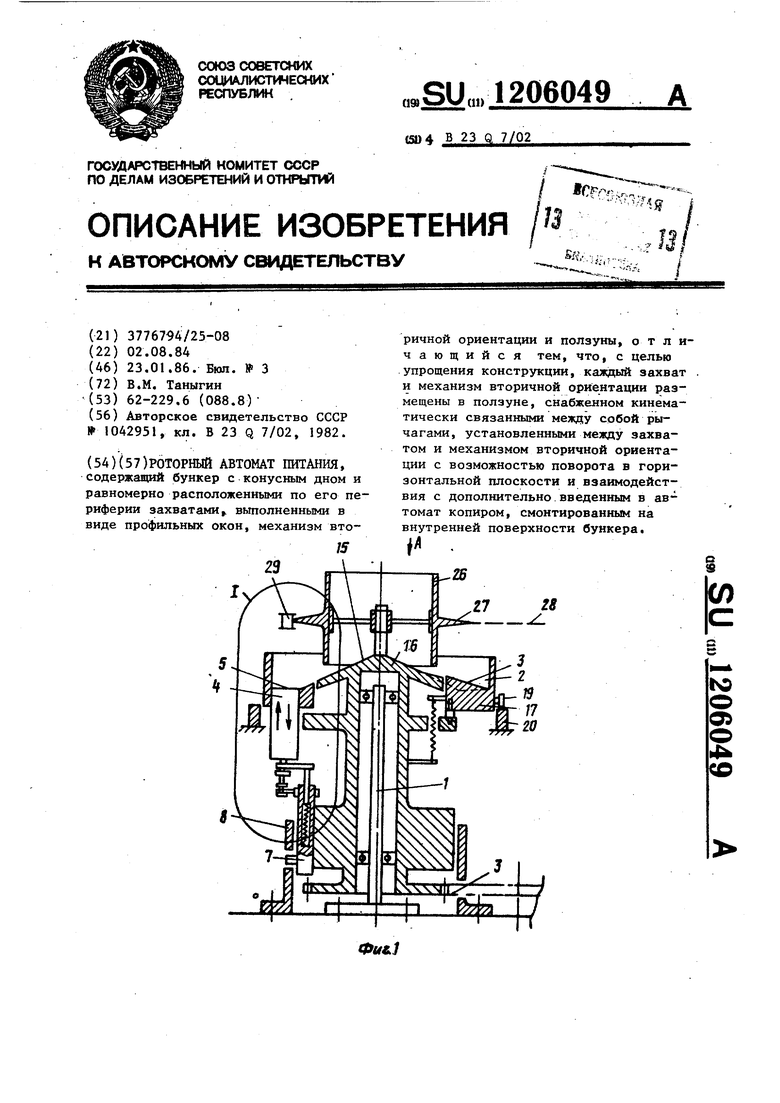
На фиг. 1 изображен роторный ав- томат питания, обший вид; на фиг. 2- вид А на фиг. 1; на фиг. 3 - узел Т на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - вид Г на фиг. 3; на фиг. 7 - узел 1 на фиг.1 вариант исполнения роторного автомат питания при подаче изделия в нижний конвейер.
Роторный автомат питания содержит (фиг.1) неподвижньй вал 1, на котором смонтирован бункер 2 с конусным днищем.3 и равномерно расположенные по окружности рабочие ползуны А с захватами 5 .для изделий 6, толкатели 7, взаимодействукшще с неподвижным кулачком 8 и связанные с ползунами 4. Каждый захват 5 ползуна 4 выполнен в поперечном сечении прямоугольным в виде профильного окна (фиг.З, 6), ограниченного снизу двумя рычагами 9 и 10, установленными на ползуне 4 с возможностью поворота на противоположно расположенных осях 11 и 12 в горизонтальной плоскости и кине матически связанными между собой пос редством шарнира 13, при этом на внутренней стороне корпуса бункера 2 вдоль оси каждого ползуна 4 смонтированы копиры 14 (фиг. 5), контак- тирующие с рычагами 9 каждого ползуна 4. Конусное днище 3 бункера 2 вьшолнено из дух частей - центральной части 15, жестко связанной с корпусом 16 ротора, и периферийной части 17, установленной на закрепленных на корпусе 16 трех пальцах 18 с возможностью осевого возвратно- поступательного перемещения за счет взаимодействия роликов 19 с непод- вижным. кольцевым кулачком 20. Причем, в днище 3 выполнены радиапьно расположенные в перемы ах между ползунами 4 ребра 21, создающие в зоне захвата изделий 6(фиг. 4) ко- нусообразные карманы 22, где изделия лежат только вдоль захватов 5, т.е. подготовленные к захвату;
5
5
5 0 5 0 5
Под рычагами 9 и 10 каждого пол- j зуна смонтирован механизм вторичной ориентации, выполненный в виде центрального канала 23, в котором расположен шток 24, соединенный посредством вилки 25 с толкателем 7 На корпусе бункера 2 смонтирован пред- бункер 26, на наружной поверхности которого установлена звездочка 27, огибаемая конвейером 28 с носителями 29 для изделий 6.
Для обеспечения вторичной ориентации цилиндрических изделий со смещенным центром тяжести типа стакана, которые не могут ориентировать- ся в профильном окне, а только на ноже с отводом изделий вниз, каждый ползун 4 может быть выполнен с центральным каналом 30 (фиг. 7), в котором расположен отводной лоток 31, зафиксированный от осевого перемещения посредством прихвата 32 а в каждом захвате 5 ползуна 4 механизм вторичной ориентации вьтолнен в виде ориентирующего элемента ножа 33, расположенного под рычагами 9 и 10, перекрьтающими захват 5.
Роторный автомат питания работа-, ет следующим образом.
При вращении роторного автомата питания ползуны 4 совершают возвратно-поступательные движения, захватывая изделия 6, находясь в крайнем нижнем положении, а в крайнем верхнем положении - выдавая их во вторично ориентированном виде (тонкая часть конуса снизу) в захватные органы цепного конвейера 28. При этом в нижнем положении ползунов 4 захваты 5 перекрыты рычагами 9 и 10 (фиг. 6), образуя глухое гнездо, в котором размещается только одно изделие 6. В верхнем положении рабочего органа рычаги 9 и 10 разводятся (фиг. 6) за счет взаимодействия рычага 9 с копиром 14, изделие 6 попадает в центральный канал 23. В результате тонкая часть изделия 6 (фиг. 3) проваливается вниз и попадает в лунку штока 24, а верхняя часть изделия удерживается по оси самим фигурным окном, образованным
рычагами 9 и 10. После зтого ползун 4 со штоком 24 вновь идет вверх, взаимодействуя с толкателем 7, и заталкивает изделие 6 в захват конвейера 2& и сразу же опускается в крайнее нижнее положение для захвата очередного изделия. Ход вверх и вниз каждого рабочего органа занимает в циклограмме ротора примерно 1/6 часть времени, остальные 5/6 времени рабочие органы находятся в нижнем положении для обеспечения гарантированного захвата изделий Причем, при захвате изделий одновременно со встряхиванием периферийной части бункера рабочие органы, в свою очередь, совершают малые возвратно- поступательные перемещения амплитудой 5-10 мм,
Роторный автомат питания для цилиндрических изделий со смещенным
06049
центром тяжести типа стакана с отводом изделий вниз (фиг. 7).работает аналогично. Разница заключается в том, что после подъема ползуна А в
5 верхнее положение и раскрытия рычагов 9 и 10 изделие 6 падает донышком вниз, ориентируясь на расположенном под рычагами ноже 33, и по отводному лотку 31 попадает в захват
10 конвейера 28, После этого ползуны 4 отходят в крайнее нижнее положение для захвата очередного изделия. I Так поочередно работает каждый ползун роторного автомата пи15 тания.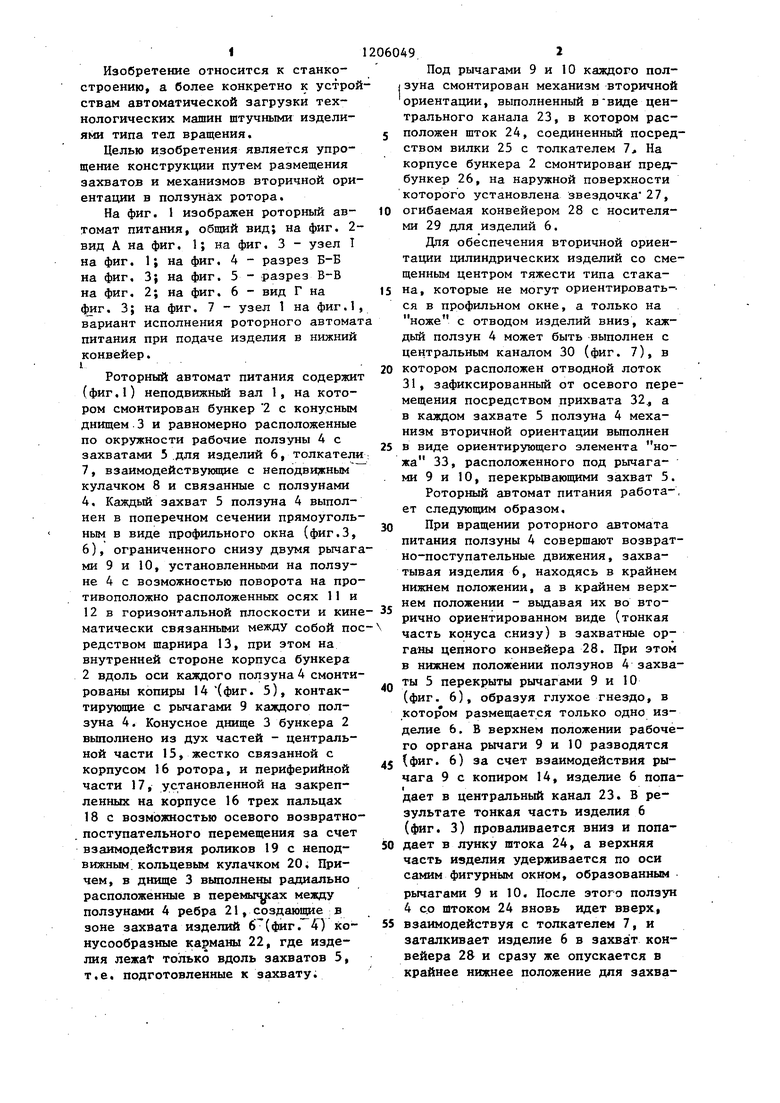
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1986 |
|
SU1371848A1 |
| Загрузочный ротор | 1989 |
|
SU1673382A2 |
| Роторный автомат питания | 1987 |
|
SU1414555A2 |
| Роторный автомат питания | 1983 |
|
SU1129056A1 |
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Роторный автомат питания | 1987 |
|
SU1530407A1 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Автомат питания для поштучной выдачи изделий | 1980 |
|
SU897468A2 |
| Роторный автомат питания | 1981 |
|
SU1000222A1 |
| Загрузочный ротор | 1989 |
|
SU1671441A1 |
Фиг.1
22
Фиг.З
f4
ВидГ
J / - I V /-
r/
7
JZ
Фиг, 6
ВНИИПИ Тираж
Заказ 8608/13 Подписное
Филиал mm Патент /
г.Ужгород,ул.Проектиая, 4
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
