ta
к; ал
с
«
а
17овьшение точности позиционирования за счет повьшения жесткости в кинема- гнческой цепи связи рычагов. Для это- Jpo кинематич еская цепь связи рычагов включает зубчато-реечные передачи с р,в-умя секторами и с механизмами выборки зазоров в этих передачах, чис- |по которых соответствует числу рыча- |гов 13j 14, 15 и 16, В каждом рычаге Выполнена полость 17, имеющая кони- |Ческке поверхности 30. В полости 17 каждого рычага, например 13 размещена зубчатая рейка 26 и зубчатые секторы 18 и 19, а также механизмы выборки зазоров. Каждый механизм выбор ки зазоров выполнен в виде конического ползуна 31 с роликом 33, подпружиненного относительно рычага пружиной 32 и взаимодействующего с конической поверхностью соответствующего рычага. А ролик 33 ползуна предназначен для взаимодействия с нерабочей поверхностью соответствующей зубчатой рейки, например 26. 5 ил.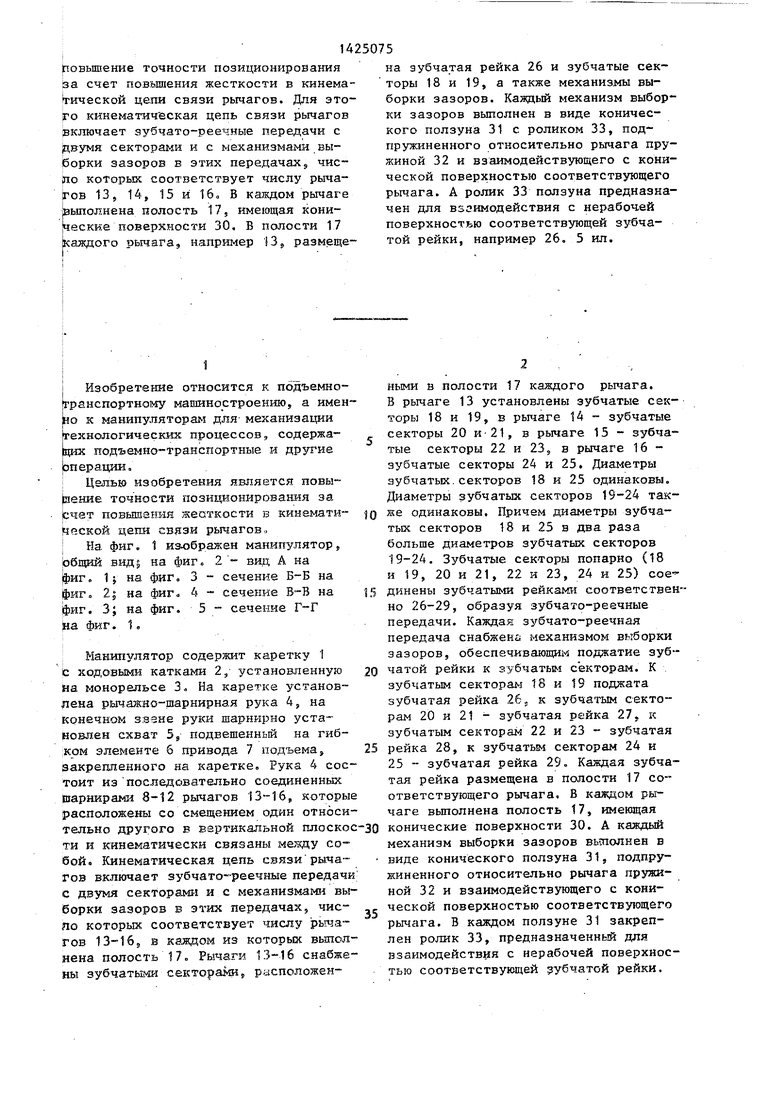

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Манипулятор | 1988 |
|
SU1521580A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
Изобретеняе относится к подъемно-транспортному мапшностроекию, a именно к манипуляторам для механизации технологических процессов, содер- жапщх подъемно-транспортные и другие операции. Целью изобретения является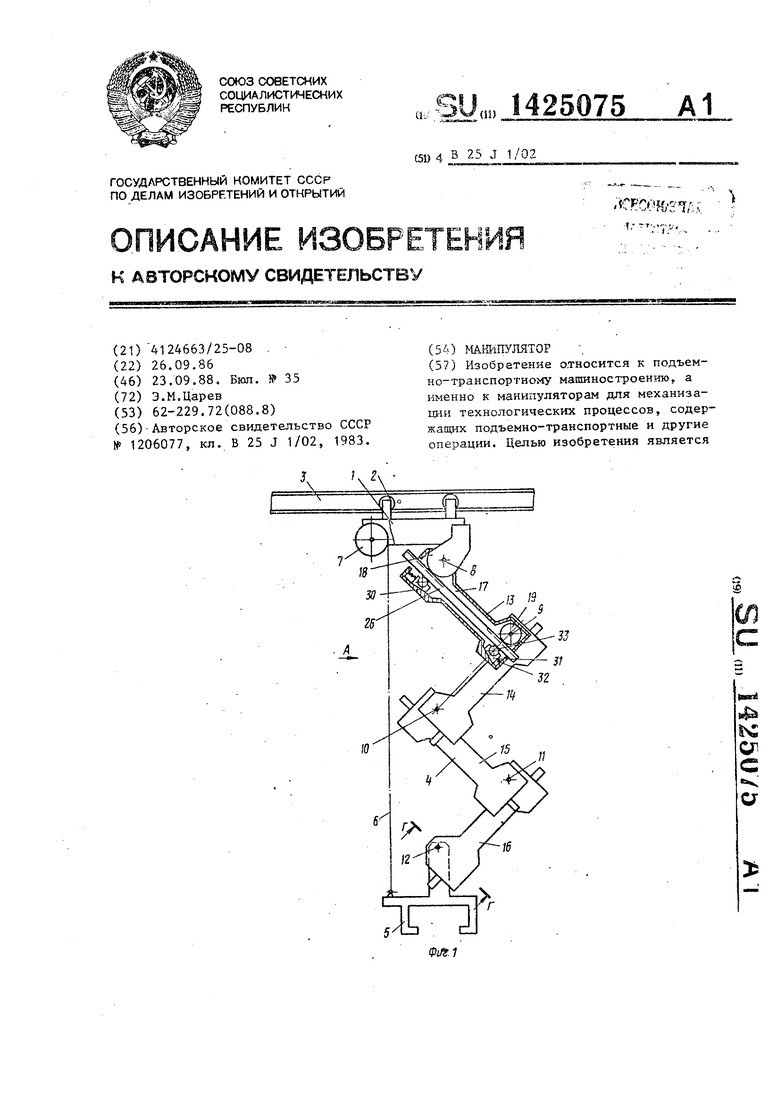
j Изобретение относится к подъемно- транспортному машиностроению, а именно к манипуляторам для- механизации технологических процессов, содержа- ищх подъемно-транспортные и другие операции.
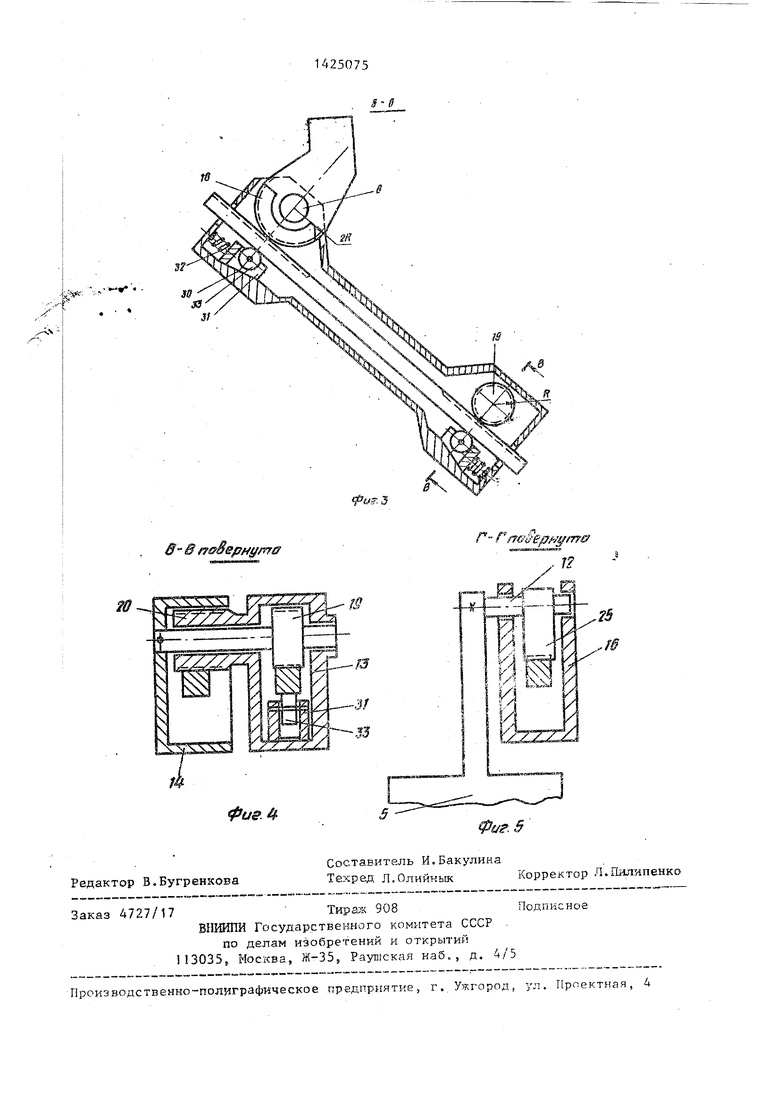
Целью изобретения является повы- |иение точности позиционирования за рчет повыюания жеоткости в кинемати™ ческой цепи связи рычагов I На фиг. 1 изображен манипулятор, Ьбгций вид на фиг. 2 - вид А на фиг. 1; на фиг, 3 - сечение Б-Б на фиг. 2| на фиг. 4 - сечение В-В на |фиг, 3; на фиг. 5 - сечение Г-Г На фиг. 1,
Манипулятор содержит каретку 1 С ходовыми катками 2 , установленную На монорельсе 3. На каретке установлена рычажно-щарнирная рука 4, на Конечном ззэне руки шарнирно установлен схват 5 9 подвешенный на гиб- :ком элементе 6 привода 7 подъема, закрепленного на каретке. Рука 4 состоит из последовательно соединенных Иарнирами 8-12 рычагов 13-16, которые расположены со смещением один относительно другого в вертикальной плоское ти и кинематически связаны между собой. Кинематическая цепь связи рычагов включает зубчато-реечные передачи с двумя секторами и с механизмами выборки зазоров в этих передачах, чис- По которых соответствует числу jpbraa- гов 13-16, в каждом из которых вьшол- иена полость 17о Рычаги 13-16 снабжены зубчатыми секторами, расположениыми в полости 17 каждого рычага. В рычаге 13 установлены зубчатые секторы 18 и 19, в рычаге 14 - зубчатые секторы 20 и 21, в рычаге 15 - зубчатые секторы 22 и 23, в рычаге 16 - зубчатые секторы 24 и 25. Диа1-1етры зубчатых.секторов 18 и 25 одинаковы. Диаметры зубчатых секторов 19-24 такQ же одинаковы. Причем диаметры зубчатых секторов 18 и 25 в два раза больше диаметров зубчатых секторов 19-24. Зубчатые секторы попарно (18 и 19, 20 и 21, 22 и 23, 24 и 25) сое5 динены зубчатыми рейкаья соответствен но 26-29, образуя зубчато-реечные передачи. Каждая зубчато-реечная передача снабжена механизмом выборки зазоров, обеспачивающим поджатие зуб0 чатой рейки к зубчатьм секторам. К зубчатым секторам 18 и 19 поджата зубчатая рейка 26, к зубчатым секторам 20 и 21 - зубчатая рейка 27, к зубчатым секторам 22 и 23 - зубчатая
5 рейка 28, к зубчать м секторам 24 и 25 - зубчатая рейка 29. Каждая зубчатая рейка размещена в полости 17 соответствующего рычага. В каждом рычаге выполнена полость 17, имеющая
0 конические поверхности 30. А каждый механизм выборки зазоров вьшолнен в виде конического ползуна 31, подпружиненного относительно рычага пружиной 32 и взаимодействующего с кониBj ческой поверхностью соответствующего рычага. В каждом ползуне 31 закреплен ролик 33, предназначенный для взаимодействия с нерабочей поверхностью соответствующей зубчатой рейки.
Манипулятор работает следующим образом.
После остановки манипулятора под рабочим местом приводом 7 подъема опускают подвешенньй на тросе 6 схват 5. Рука 4 раскладывается. Шарниры 9 и 11 перемещаются строго по вертикали вследствие равенства расстояний между шарнирами каждого рьг-tara и пе- редаточного отношения 2:1 между крайними и внутренними зубчатыми секторами .руки 4, рычаги 13 и 15, а также 14 и 16 перемещается попарно парал- лельно, а шарниры 8, 10 и 12 всегда находятся на одной вертикальной линии
о р м у л а
изобретения
20
Манипулятор, содержащ.€й кареткуj установленную на ней рычажно-шарнир- ную руку, последовательно соединенные рычаги которой расположены со
Вид .А
ад. гв
JQ - j .
25075
смещением один
20
относительно другого в вертикальной плоскос и и кинемати- связаны между собой, схват, шгрнирно соединенный с конечным зве- Hc.f руки, и привод подъема схвата, закрепленный на каретке, о т л и- чающийся тем, что, с целью повышения точности позиционирования уа счет повышения жесткости в кинематической цепи связи рычагов, пос- ледняк включает зуЗчато-реечные пера- дач1ч е двумя сектора и с механизмами выборки зазоров в этих передачах, число которых соответствует числу ры -гагов, причем в калэдом рычаге выполнена полость, имеющая конические поверхности, а механизм выборки зазоров выполнен в виде подпружиненного конического ползуна с роликом и размещен соответственно неж,цу конической поверхностью рычага и нерабочей поверхностью зубчатой рейки.
в тд21
15,21,2128
фиг.г
&- в /7i &e/ff fffl7ff
Фи§.
pLt.
Г Г ffG&e f-jfffTfff
ваяв
, ff
5
| Манипулятор | 1983 |
|
SU1206077A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
