1
Изобретение относится к, станкостроению и может быть использовано во вспомогательном технологическом оснащении автоматизированных процессов производства на основе промыш- ленных роботов, и является усовершенствованием известного устройства, выполненного по авт.св. № 895616.
Цель изобретения - обеспечение точности подачи пружинящих заготовок под схват промьшшенного робота путем исключения их дезориентации при подъеме в рабочей кассете до требуемого уровня.
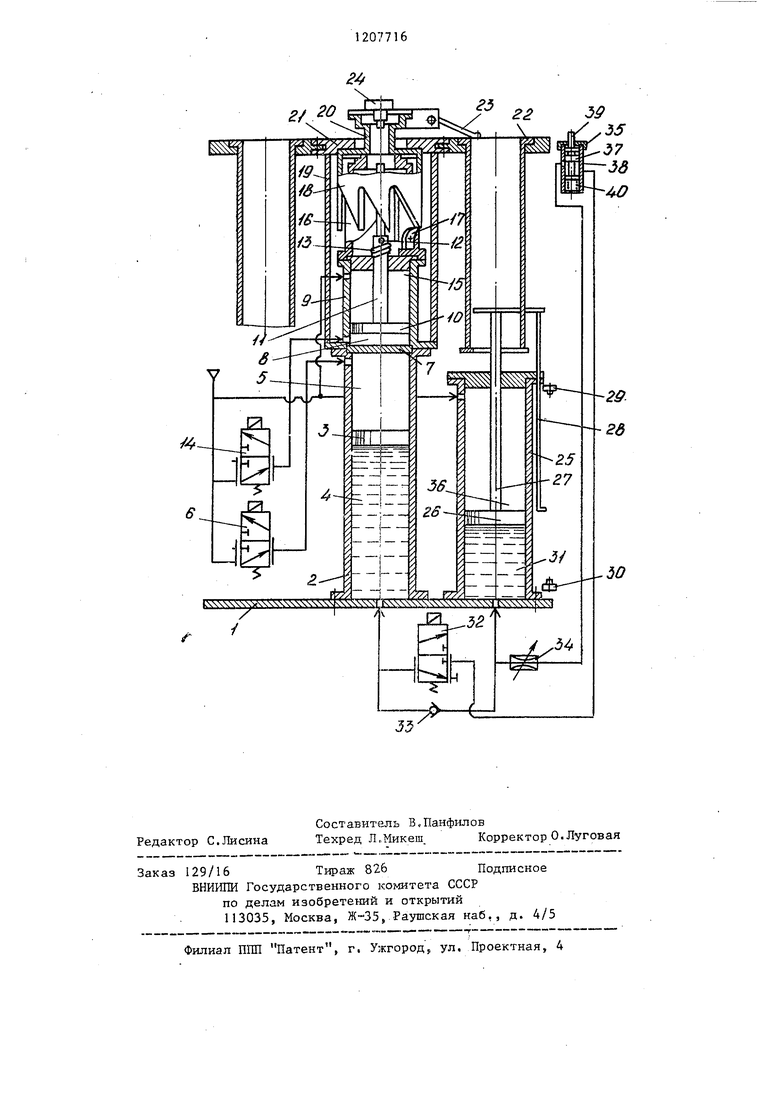
На чертеже представлена конструк- тивная схема предлагаемого устройства .
На основании 1 установлен пненмо- гидравлический преобразователь 2, разделенный порпгаем 3 на две полости полость 4, заполненную маслом, и пневмополость 5, соединенную через нормально открытый электропневмокла- пап 6 с магистралью сжатого воздуха. Через перемычку 7, разделяющую по- лости 5 и 8, на пневмогидравлическом преобразователе 2 установлен пневмо- цилиндр 9 механизма поворота, включающий в себя поршень 10 и шток 11 с установленным на нем коромыслом 12 которое подпружинено пружиной 13. Поршневая полость 8 пневмоцилиндра 9 соединена с магистралью сжатого воздуха через нормально открытый элек- тропневмоклапан 14, а штоковая по- лость 15 соединяется с магистралью сжатого воздуха постоянно.
К пневмоцилнндру 9 крепится стакан 16 механизма поворота с предохранительной защелкой 17. На стакане 16 установлена вращающаяся косозу- бая муфта 18 с закрепленным на ней корпусом 19. Последний содержит стойку 20 и поворотный стол 21 с кассетами 22 для заготовок (не пока- зано). На стойке 20 размещены датчик 23, определяющий рабочий уровень заготовок по вертикали в кассете 22, и конечный выключатель 24, сигнализирующий о наличии поворотно- го стола 21 в заданном положении.
Рядом с пневмогидравлическим преобразователем 2 по оси кассеты 22 установлен механизм подачи заготовок, включающий цилиндр 25, пор- шень 26, шток 27, связанный жестко со штангой 28, предназначенной для включения конечных выключателей 29
162
и 30, Полость 4 пневмогидравличес- кого преобразователя 2 и поршневая полость 31 цилиндра 25 сообщаются между собой через нормально закрытый электрогидравлический кран 32, обратный клапан 33, дроссель 34 и запорный клапан 35, а щтоковая полость 36 цилиндра 25 соединяется с магистралью сжатого воздуха постоянно. Клапан 35 содержит поршень 37, перемещающийся в корпусе 38 и перекрывающий подачу масла через клапан при нажатии на шток 39, и возвратную пружину 40.
Устройство работает следующим образом.
В исходном положении поршневая полость 8 пневмоцилиндра 9 и пневмополость 5 пневмогидравлического преобразователя 2 соединяются с магистралью сжатого воздуха соответственно через нормально открытые электро- пневмоклапаны 14 и 6, а штоковая полость 15 пневмоцилиндра 9 и штоковая полость 36 цилиндра 25 соединяются с магистралью сжатого воздуха постоянно.
Сжатый воздух из магистрали через электропневмоклапан 6 поступает в полость 5, а через электропневмоклапан 14 - в полость 8. Воздействуя на поршень 10, сжатый воздух поднимает его, вытесняя при этом воздух из полости 15 в основную магистраль. Поршень 10, связанный через шток 11 с коромыслом 12, перемещает последнее по скошенному пазу стакана 16, поворачивая при этом муфту 18 на одни зуб, а с ней и корпус 19, содержащий стол 21 с кассетами 22 для заготовок. По достижении коромыслом 12 верхнего
крайнего положения включается конечный выключатель 24, который сигнализирует о наличии стола с кассетами для заготовок в заданном положении.
Исполнительный орган робота (не показан) подходит к кассете 22 для осуществления захвата заготовки, нажимая при зтом на шток 39 запорного клапана 35. Шток 39 и связанный с ним поршень 37 перемещаются в корпусе 38 клапана, перекрывая магистраль перепуска масла из полости 4 пневмогидравлического преобразователя 2 в поршневую полость 31 цилиндра подачи заготовок. Далее происходит захват заготовки, исполнительный орган робота отходит от кассеты 22 и под воздействием пружины 40 поршень 37 и шток 39 возвращаются в исходное положение, вновь открывая магистраль перепуска масла.
По мере понижения уровня заготовок Б рабочей кассете рычаг датчика 23 опускается и замыкает цепь питания электрогидравлического крана 32, который, открываясь, перепускает мае ло из полости 4 в полость 31 через дроссель 34 и открытый запорный клапан 35.
Если в момент захвата пружиняш;их заготовок их стопа, поджатая охватом робота в кассете, понижается и срабатывает датчик 23, отслеживающий уровень, то подъема заготовок не про исходит, так как нажатый роботом за- порньй клапан перекрывает магистраль перепуска масла. При отходе схвата робота и открытии при этом запорного клапана датчик уровня замеряет освободившуюся от поджатия схватом стопу заготовок и устанавливает требуемьш уровень последних.
Таким образом, периодически по мере взятия заготовок из кассеты 22 поршень 26 со штоком 27 и связанной с ним штангой 28 поднимается до тех пор, пока штанга 28 не нажимает на конечный выключатель 29. Последний дает сигнал на электропневмоклапаны 6 и 14, которые включаются, при этом воздух из полостей 5 и 8 выходит в атмосферу. Поскольку штоковые полости 15 и 36 постоянно соединены с ма10
15
гистралью сжатого воздуха, поршень 10 вместе со штоком 11 и коромыслом 12 опускается в нижнее крайнее положение, при этом защелка 17 удерживает муфту 18 от обратного поворота, а пружина 13, воздействуя на коромысло 12, заводит его за следующий зуб, и механизм поворота приходит в исходное положение.
Одновремеино поршень 26 под воздействием давления воздуха в полости 36 вытесняет масло через обратный клапан 33 из полости 31 в полость 4. По достижении поршнем 26, а с ним- и штангой 28 нижнего положения включается конечный выключатель 30, который дает сигнал на обесточивание электропневмоклапа- нов 6 и 14. Через последние сжатый воздух поступает в полости 5 и 8, после чего устройство приходит в исходное положение.
Для остановки работы устройства снимается питание с электропневмо- 25 клапанов 6 и 14, электрогидравлического крана 32, и устройство отсоединяется от магистрали сжатого воздуха.
30 Включение запорного клапана в магистраль перепуска масла из пнев- могидравлического преобразователя в цилиндр подъема заготовок позволяет обеспечить стабильный уровень пружинящих в момент захвата стопы заго20
35
товок в кассете и предотвратить их дезориентацию при освобождении стопы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок | 1980 |
|
SU895616A1 |
| Устройство для подачи заготовок | 1982 |
|
SU1047659A2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Устройство для подачи заготовок | 1981 |
|
SU961923A2 |
| Устройство для подачи заготовок | 1985 |
|
SU1220717A2 |
| Устройство для подачи заготовок | 1976 |
|
SU623706A1 |
| Устройство для выдачи плоских заготовок из стопы | 1984 |
|
SU1235595A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Устройство для подачи плоских заготовок в рабочую зону пресса | 1984 |
|
SU1238834A1 |
| Устройство для изготовления трубок с гофрами | 1977 |
|
SU867466A1 |
Редактор С.Лисина
Составит«шь В.Панфилов
Техред Л.Микеш. Корректор О. Луговая
129/16 Тираж 826Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ПИП Патент, г. Ужгород, ул. Проектная, 4
| Устройство для подачи заготовок | 1980 |
|
SU895616A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
