1
Изобретение относится к машиностроению, в частности к захватам манипуляторов.
Цель изобретения - повышение надежности работы захвата в условиях пониженного давления и вакуума путем снабжения эластичного баллона герметичной полостью с газом.
На фиг. 1 показан захват манипулятора, jpaapes} на фиг, 2 - разрез А-А на фиг, 1.
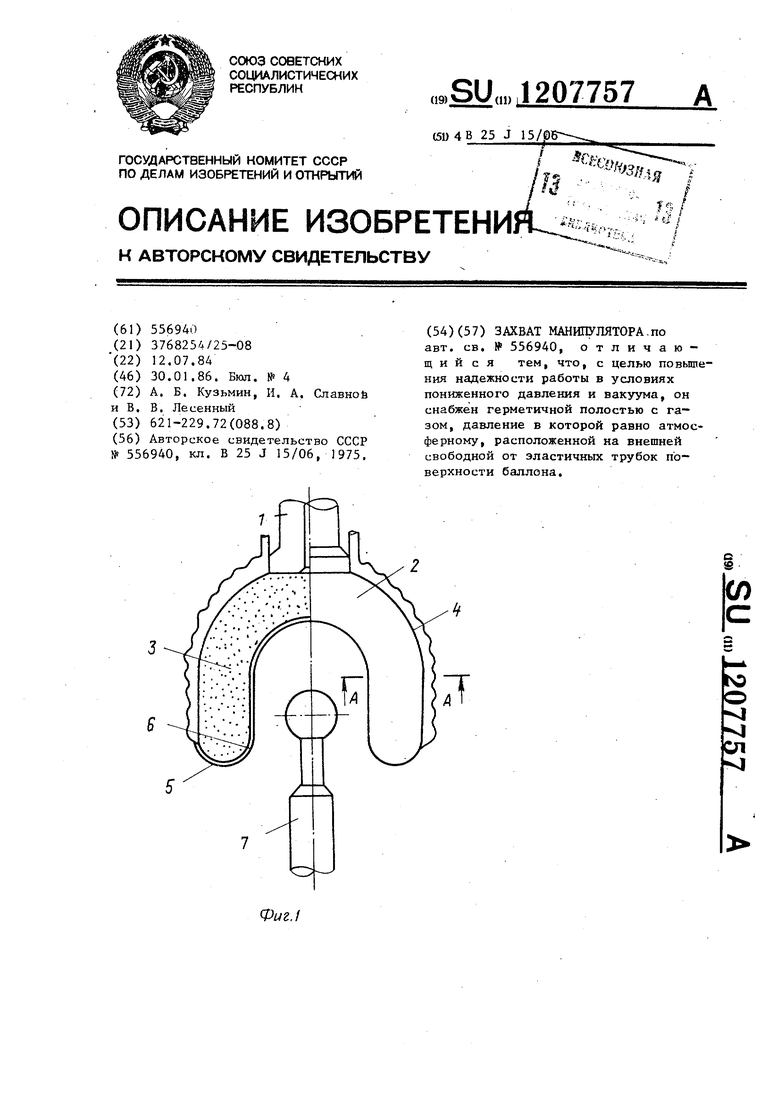
Захват манипулятора содержит корпус 1 с закрепленным на нем эластичным баллоном 2, заполненным сыпучим материалом 3, к внешней поверхности подковообразного баллона 2 прикреплены гофрированные трубки 4, а осталная поверхность баллона 2 снабжена тонкостенной эластичной оболочкой 5, образующей с баллоном 2 герметич- ную полость 6, заполненную газом, объект 7 манипулирования. Внутренняя полость баллона соединена с вакуумно системой. Гофрированные трубки соединены с пневмосистемой.
Захват работает следующим образом
В исходном Положении захват разом нут. Во внутренней полости баллона 2 находится газ под давлением, равным (или близким) к атмосферному. В гер-
10
IS 2025
-. ЗО
207757
матичной полости 6 находится газ под давлением, равным или несколько меньшим, чем давление в баллоне 2. Гофри- . рованные трубки 4 вакуумированы. 5 При захватывании объекта 7 в гофрированные трубки 4 подается газ под давлением. В результате трубки 4 стремятся удлиниться И растягивают внешнюю сторону баллона 2, к которой они присоединены. При этом баллон 2 изгибается и его противоположные- части.
являющиеся губками захвата, смыкаются и надежно захва1Ъ1вают объект. Эластичные стенки баллона 2 и сыпучий материал 3 обеспечивают мягкий захват объекта практически любой формы. После захватывания объекта внутренняя полость баллона 2 вакуумиру- ется. Раскрытие губок захвата производится в обратном порядке. Баллон .2 заполняется газом из пневмосистемы, гофрированные трубки вакуумируются, в результате чего губки захвата раздвигаются под действием сил упругости стенок, эластичного баллона и ос«- вобождают объект. Захват возвращается в исходное состояние.
Таким образом, изобретение позволяет повысить надежность работы захвата в вакууме.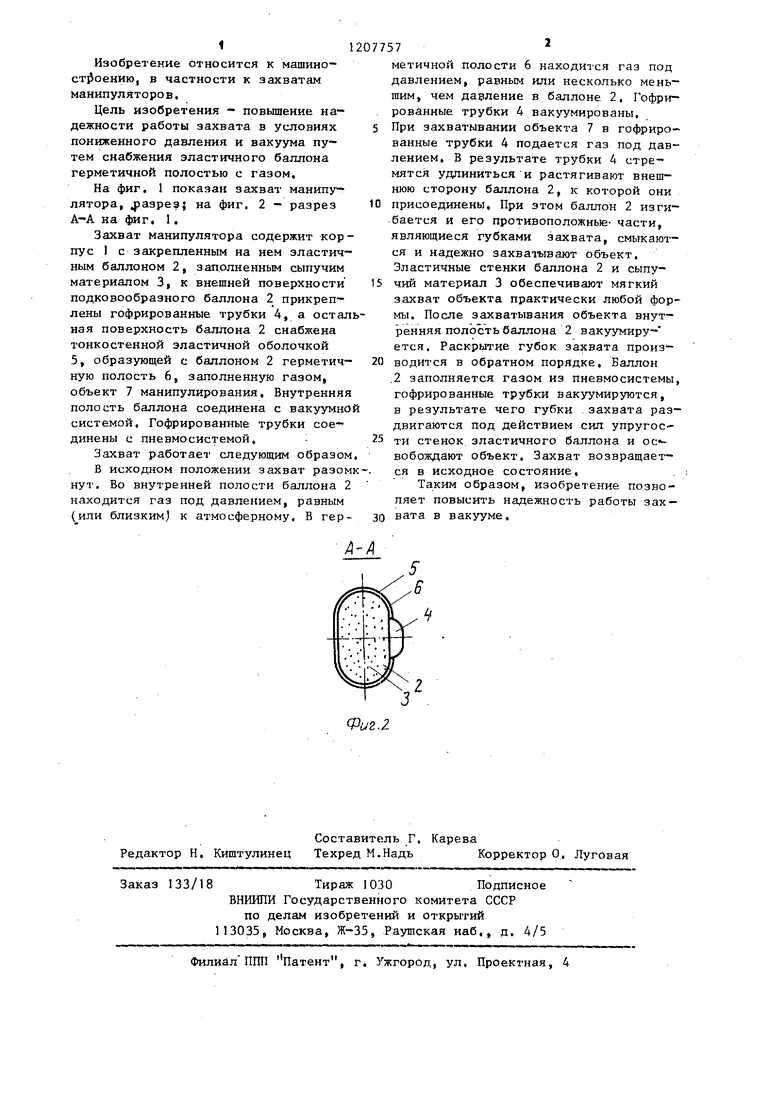
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1988 |
|
SU1576310A1 |
| Захват манипулятора | 1978 |
|
SU935263A2 |
| Вакуумный схват | 1983 |
|
SU1121133A2 |
| Захват манипулятора | 1975 |
|
SU556940A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU831611A2 |
| Схват манипулятора | 1984 |
|
SU1242348A1 |
| Вакуумный захват манипулятора | 1982 |
|
SU1085808A1 |
| Схват манипулятора | 1986 |
|
SU1380938A1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
Фиг.1
Составитель Г, Карева Редактор Н. Киштулинец Техред М.Надь Корректор О. Луговая
Заказ 133/18Тираж 1030 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Захват манипулятора | 1975 |
|
SU556940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
