1
Изобретение относится к маишностроению, а именно к конструкгщям манипуляторов, и может найти применение в различных областях техники.
Известен захват манипулятора, содержащий захватные рычаги, на рабочих поверхностях которык размещены эластичные контейнеры, заполненные гранулированным сыпучим материалом.
Недостатком указанного захвата является необходимость применения значительной силы, сдавливающей предмет, для надежного его закрепления.
Наиболее близким к изобретению по технической сущности является захват манипулятора, содержащий корпус, устройство для схватывания «редмета, вакуумную систему с органами управления и баллон с растяжимыми стенками, наполненный сьшучим материалом и соединенный с вакуумной системой.
Недостатком этого устройства является сложность конструкции, связанная с наличием рычагов в устройстве для схватывания предмета и приводного механизма для этих рычагов, а также большое усилие схватывания, оказывающее большое дайж iffle на предмет, и недостаточная надежность схвать вашш.
Цель изобретения повышение надежности, уменьшение давления захвата на предмет и упрощение конструкции захвата.
Это достигается тем, что баллон с сыпучим материалом прикреплен к корпусу захвата, а устройство для схватьтания предмета вьшолнено в виде расположенных по внешней поверхности баллона эластичных трубок, имеющих гофры по наружной образующей и соединенных с пгавмосистемой.
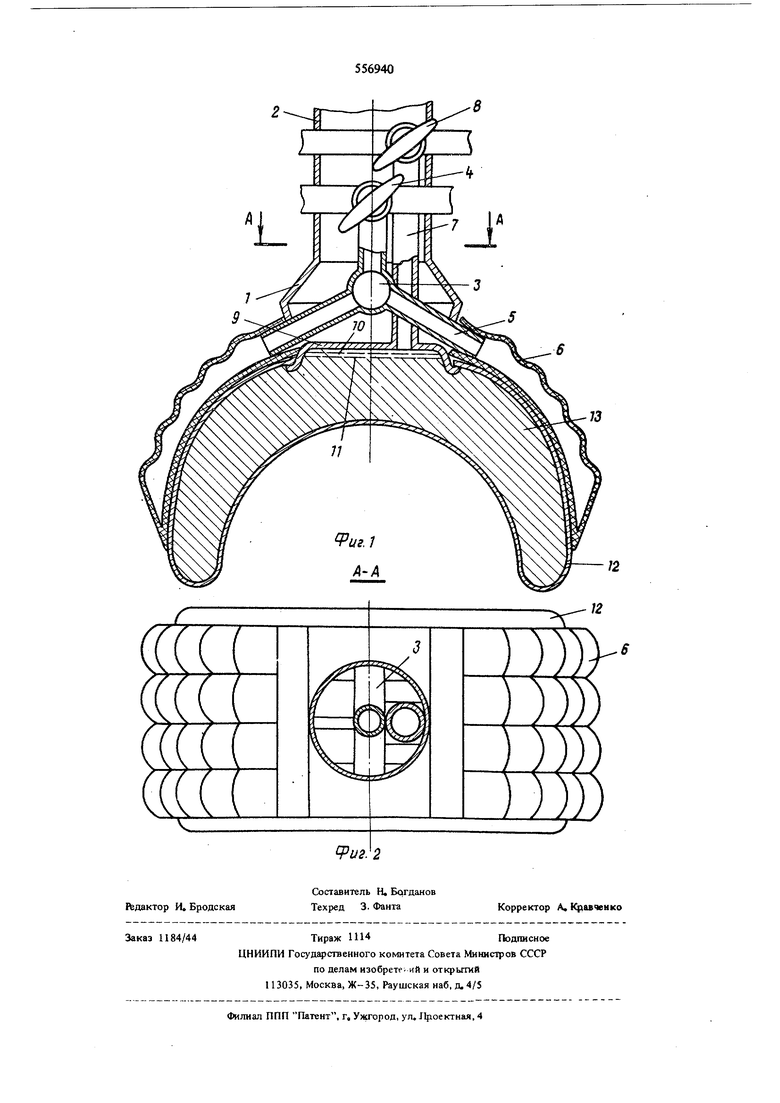
На фиг. 1 изображен предлагаемый захват, продольный разрез; на фиг. 2 - разрез А-А фиг. 1.
Захват манипулятора содержит корпус 1, закрепленный на руке 2 маннпулятора. На корпусе закреплен коллектор 3, соединенный через орган управления 4 с пневмоснстемой (не показана) и снабженный отводящими трубками 5, на концы которых надеты эластичные трубки 6, имеющ;ие гофры по наружной образующей.
На корпусе 1 захвата также закреплены вакуумный коллектор 7, соединенный через орган управления 8 с вакуумной системе (не показана), и корпус 9 фильтра, соединенный с вакуумным коллектором 7 к снабженный крупной сеткой 10 и мелкой сеткой 11.
К корпусу 1 захвата прикреплен баллон 12 из эластичного растяжимого материала, гермел1зированный относительно корпуса 9 фильтра и заполданный сьшучим материалом 13.
Захват шттутттора работает следующим образом.
В исходном положении органы управления 4 и 8 соеданяют полости трубок 6 и баллона 12с атмосферой. Захват подводится к захватываемому предмету и посредством органа управления 4 трубки 6 соедюшются с пневмосистемш. При этом под действием внутреннего давления гофры на наружной поверхности трубок 6 распрямляются и трубки, изгибаясь, сводят концы баллона 12. Баллон 12 плотно охватьшает захватываемый предмет своей внутренней поверхностью, которая принимает форму захватываемого предмета за счет деформации материала стенок баллона 12 и смещения друг относительно друга частиц сыпучего материала 13. После этого посредством органа управления 8 полость баллона 12 через вакуумный коллектор 7 соединяется с вакуумной системой. Частицы сыпучего материала 13 под действием атмосферного давлешщ, передаваемого через стенки баллона 12, теряют способность смещаться друг относительно друга, и сьщучий материал как бы затвердевает, сохраняя приобретенную при захвате предмета форму и не Создавая дополнительного давления на захватываемый предмет. При этом баллон 12 образует с
корпусом 1 захвата одно жесткое тело, надежно удерживающее захватываемый предмет. Давление в трубке 6 не влияет при этом на удержание предмета.
Для освобождения предмета полосга трубок 6 и баллона 12 соединяются с атмосферюй посредством органов управления 4 и 8, и трубки 6 вместе с баллоном 12 принимают исходную форму за счет собственной упругости или под действием дополнительных упругих элементов (не показаны).
Сетки 10 и И предотвращают вынос в вакуумную систему частиц сьшучего материала 13.
Формула изобретения
Захват манипулятфа, содержащий кфпус захвата, устройство для схватывания предмета, вакуумную систему с органами управления и баллон с растяжимыми стенками,наполненный сыпучим материалом и соединенный с вакуумной системой, отличающийся тем, что, с целью повыщения надежности схватьшаш1я,уменьшения давления захвата на предмет и упрощения конструкции захвата, баллон с сьшучим материалом прикреплен к корпусу захвата, а ус1ройство для схватьшання предмета выполнено в виде расположенных по внепшей поверхности баллона эластичных трубок, имеющих гофры по наруйшой образующей и соединенных с пневмосистемой.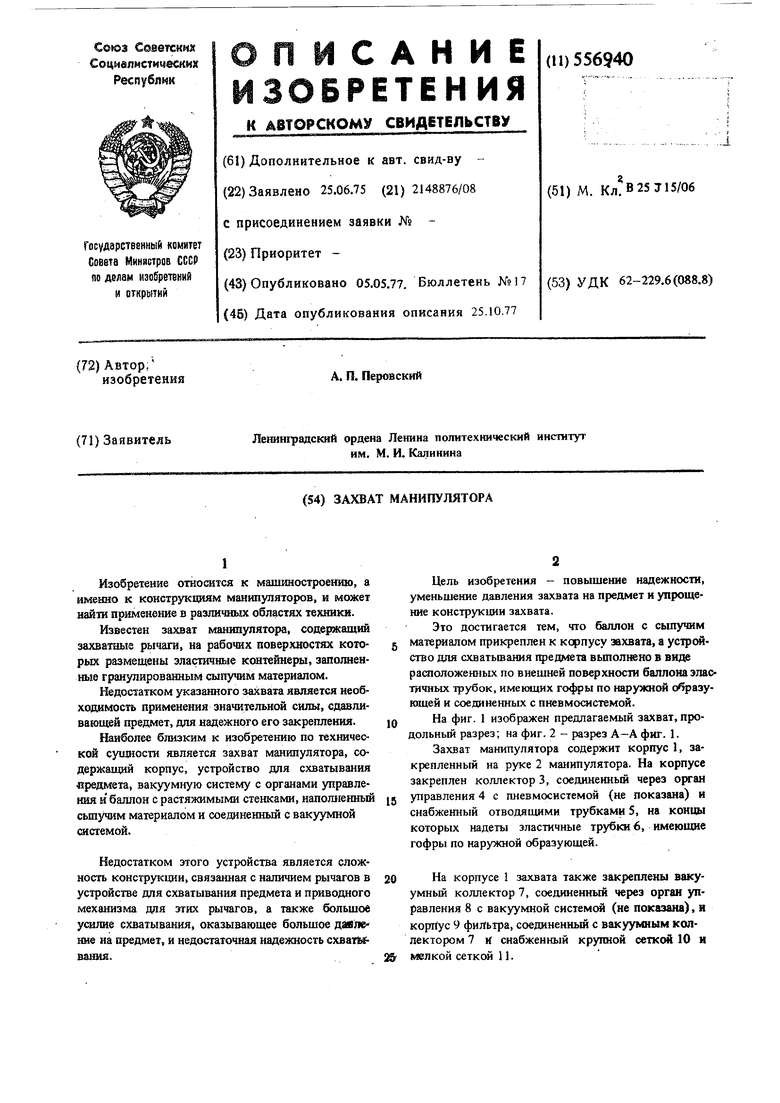
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1242348A1 |
| Схват манипулятора | 1988 |
|
SU1576310A1 |
| Вакуумный схват | 1983 |
|
SU1121133A2 |
| Исполнительный орган манипулятора | 1975 |
|
SU510364A2 |
| Захват манипулятора | 1984 |
|
SU1207757A2 |
| Вакуумный захват манипулятора | 1982 |
|
SU1085808A1 |
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| Исполнительный орган манипулятора | 1979 |
|
SU854709A2 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU770789A2 |