(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1979 |
|
SU854709A2 |
| Исполнительный орган манипулятора | 1978 |
|
SU770789A2 |
| Исполнительный орган манипулятора | 1975 |
|
SU510364A2 |
| Исполнительный орган манипулятора | 1974 |
|
SU498156A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Манипулятор | 1974 |
|
SU547336A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Захватное устройство | 1984 |
|
SU1237423A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
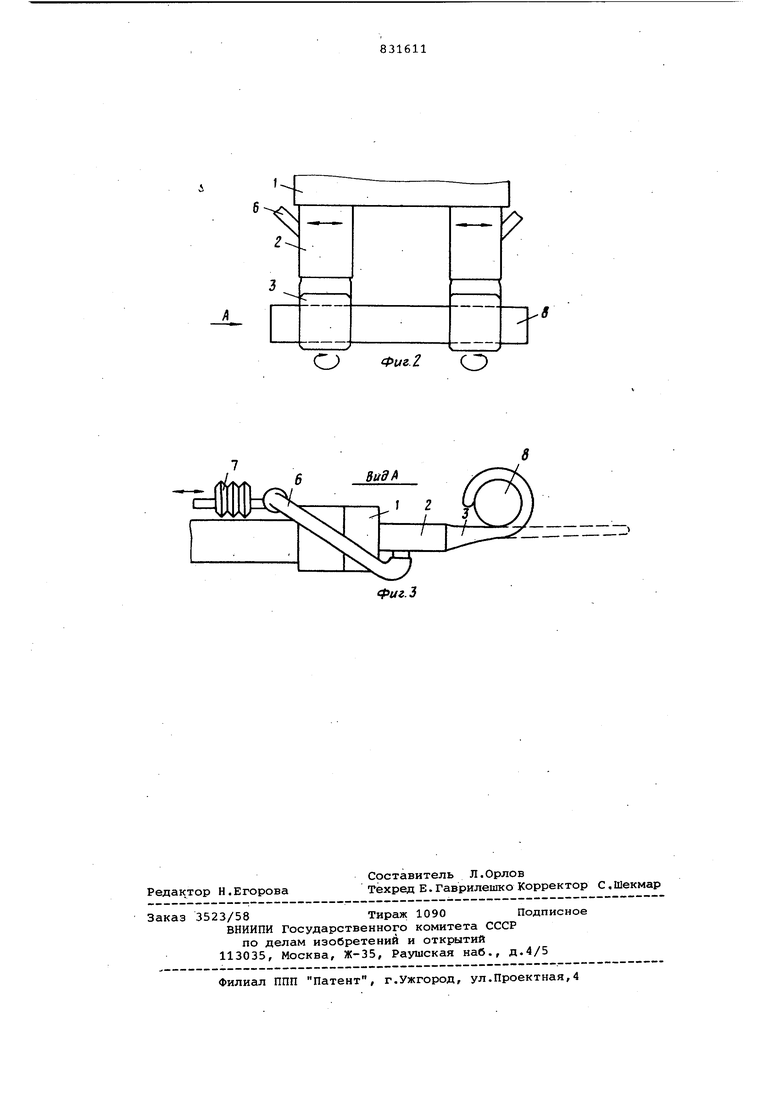
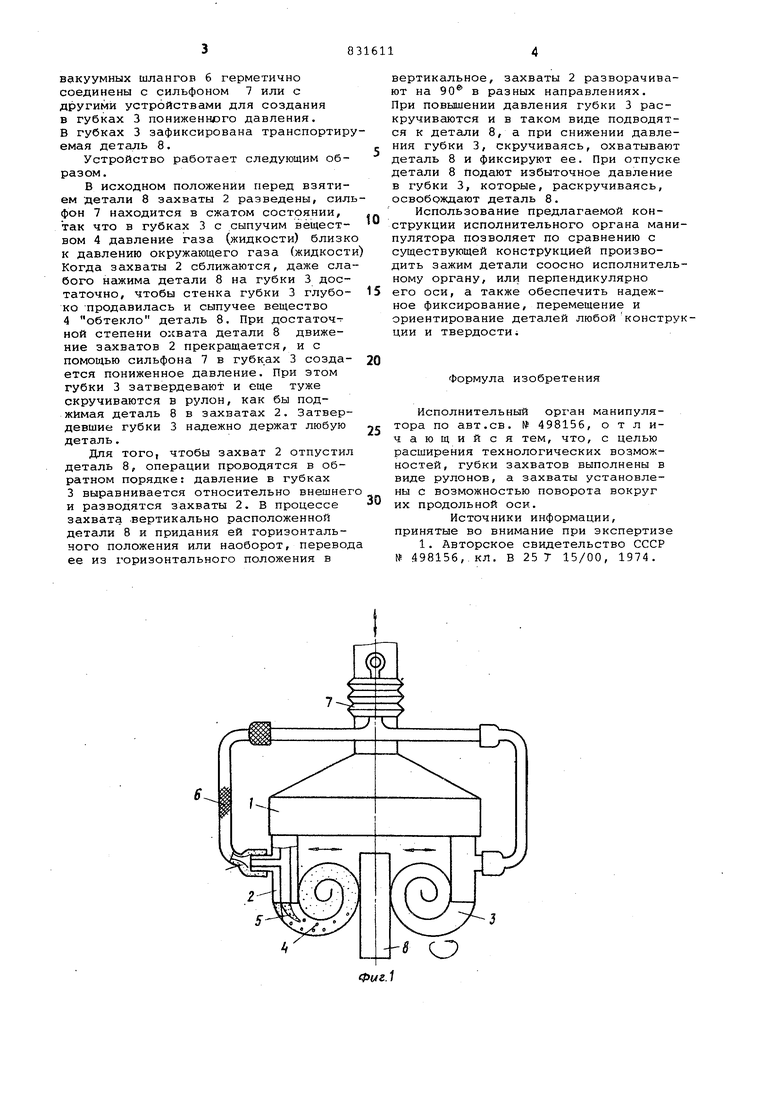
Изобретение относится к изготов.т ению манипуляторов промышленных роботов и может быть использовано для надежного захватывания и закрепления деталей различной формы. По основному авт.св. № 498156 известен исполнительный орган манипулятора, содержащий захваты с губками, выполненными из эластичного тонкосте ного материала и заполненными сыпучим гранулированным веществом, а также герметично связанным с губками устройством для создания в них пониженного давления на время закрепления детали l . Недостатком известного исполнител ного органа манипулятора является то что он не обеспечивает захват плоски и цилиндрических изделий, так как при затвердевании губок, т.е. в момент создания пониженногодавления эластичный материал, сжимаясь, плот нее охватывает сыпучее гранулированное вещество и снижает первоначально действующее усилие зажима. Это приводит к проскальзыванию зажимаемых и делий, что ограничивает технологические возможности исполнительного о гана манипулятора и снижает надежность захвата деталей. Цель изобретения - расширение технологических возможностей и повышение надежности захвата деталаП. Для достижения поставленной цели губки захватов выполнены в виде рулонов, а захваты установлены с возможностью поворота вокруг их продольной оси. На фиг.1 изображен исполнительный орган манипулятора, общий вид; на фиг.2 - исполнительный орган манипулятора в случае захвата горизонтально расположенного предмета; на фиг.З - вид А на фи.г.2. Исполнительный орган манипулятора содержит Kofinyc 1 с вращающимися вокруг своей оси захватами 2, которые могут сближаться, расходиться или останавливаться в выбранном положении с помощью электроили гидропривода Сна чертеже не показан). На захвате 2 закреплены губки 3, выполненные в форме рулонов из эластичного материала (резина, прорезиненная ткань и т.п.) , в которых помещено сыпучее гранулированное вещество 4 (пластмассовые, пенопластовые и т.п. полые шарики), причем внутрь губок 3 введены перфорированные трубки 5, которые посредством вакуумных шлангов 6 герметично соединены с сильфоном 7 или с другими устройствами для создания в губках 3 пониженного давления. В губках 3 зафиксирована транспортир емая деталь 8. Устройство работает следующим образом. В исходном положении перед взятием детали 8 захваты 2 разведены, сил фон 7 находится в сжатом состоянии, так что в губках 3 с сыпучим веществом 4 давление газа (жидкости) близк к давлению окружающего газа (жидкост Когда захваты 2 сближаются, даже сла бого нажима детали 8 на губки 3 достаточно, чтобы стенка губки 3 глубо ко продавилась и сыпучее вещество 4 обтекло деталь 8. При достаточ ной степени охвата детали 8 движение захватов 2 прекращается, и с помощью сильфона 7 в губках 3 созда ется пониженное давление. При этом губки 3 затвердевают и еще туже скручиваются в рулон, как бы поджимая деталь 8 в захватах 2. Затвер девшие губки 3 надежно держат любую деталь. Для того, чтобы захват 2 отпусти деталь 8, операции проводятся в обратном порядке: давление в губках 3 выравнивается относительно внешне и разводятся захваты 2. В процессе захвата вертикально расположенной детали В и придания ей горизонтального положения или наоборот, перево ее из горизонтального положения в
« О вертикальное, захваты 2 разворачивают на 90 в разных направлениях. При повышении давления губки 3 раскручиваются и в таком виде подводятся к детали 8, а при снижении давления губки 3, скручиваясь, охватывают деталь 8 и фиксируют ее. При отпуске детали 8 подают избыточное давление в губки 3, которые, раскручиваясь, освобождают деталь 8. Использование предлагаемой конструкции исполнительного органа манипулятора позволяет по сравнению с существующей конструкцией производить зажим детали соосно исполнительному органу, или перпендикулярно его оси, а также обеспечить надежное фиксирование, перемещение и ориентирование деталей любойконструкции и твердости; Формула изобретения Исполнительный орган манипулятора по авт.св. № 498156, отличающийся тем, что, с целью расширения технологических возможностей, губки захватов выполнены в виде рулонов, а захваты установлены с возможностью поворота вокруг их продольной оси. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 498156, кл. В 25 Т 15/00, 1974.
О о
