fS
Г
ю
(Л
со 00 о
00
сх
Изобретение относится к машино- строеншо, а именно к робототехнике, и может быть использовано при конструировании исполнительных органов роботов и манипуляторов.
Целью изобретения является расширение технологических возможностей з за счет увеличения грузоподъемности. На чертеже изображен схват манипулятора, общий вид.
Схват содержит закрепленный на основании 1 баллон 2, заполненный гранулами 3, которые состоят из твердых ядер, дражжированных в упругом, возможно, пористом полимере для придания им округлой формы. В баллоне 2 между гранулами 3 расположены элластичные трубки 4, связанные чере патрубок 5 и управляемые клапаны 6 и 7 с полостью 8, выполненной в основании 1 и связанной с источником сжатого газа (не показан). По бокам баллона 2 расположены гофрированные камеры 9, внутри которых располагаются упругие жгуты 10 или пружины. Схват соединен с рукой 11 манипулятора с помощью шарнира 12, параллель rio которому расположен сильфон 13, внутри которого установлена пружина 14, при этом внутренняя полость сильфона 13 соединена через золотник 15 с шлангом 16, по которому подается сжатый газ в полость 8. Камеры 9 соединяются Патрубком 17, содержащим управляемые клапаны 18 и 19, с полостью 8.
Устройство работает следующим образом.
Для захвата детали открывается клапан 18, при зтом клапан 19 закрыт Сжатый газ из полости 8 основания 1 поступает в камеры 9 и те под его давлением, растягивая жгуты 10, заставляют баллон 2 охватить захватываемую деталь. При этом клапан 7 открыт, а клапан 6 закрыт, а поэтому в трубках 4 находится газ под атмосферным давлением (жесткость баллона невелика). Упругий полимер на поверхности гранул 3 под действием небольшого давления почти не дефор0
5
0
5
0
5
0
5
0
мируется, а поэтому гранулы легко пересыпаются .
Для фиксации детали закрывают клапан 7 и открывают клапан 6, что вызывает наполнение трубок 4 сжатым газом, расширение их и спрессование вокруг низ гранул. Полимер (особенно, если это пористое вещество) на поверхности гранул деформируется и они сцепляются между собой за счет выступов на поверхности твердых ядер гранул.
Деталь после заполнения трубок 4 сжатым газом (2-3 атм) может быть перенесена. Для поворота детали после фиксации ер в захвате может служить сильфон 13, который при наполнении его сжатым газом поворачивает схват относительно руки 11. При соединении сильфона с помощью золотника 15 с атмосферой он под действием пружины 14 сокращается, возвращая схват в исходное положение. Повернув деталь, после захвата можно в ряде случаев уменьшить давление на ее поверхность.
Для опускания детали клапан 7 открывается, а клапан 6 закрывается, выпуская газ из трубок 4 в атмосферу, одновременно клапан 18 закрывается, клапан 19 открьшается, соединяя камеры 9 с атмосферой.
При этом гранулы восстанавливают свою округлую форму, баллон 2 теряет свою жесткость, упругие жгуты сокращаются, разводя схват и выпуская деталь.
Формула изобретения
I
Схват манипулятора, содержащий губки, выполненные в виде эластичного баллона, заполненного гранулами, отличающийся тем, что, с целью расширения технологических воз можностей за счет увеличения его грузоподъемности, он снабжен источником сжатого газа и расположенными, внутри баллона элластичными трубками, полости которых связаны с источником сжатого газа.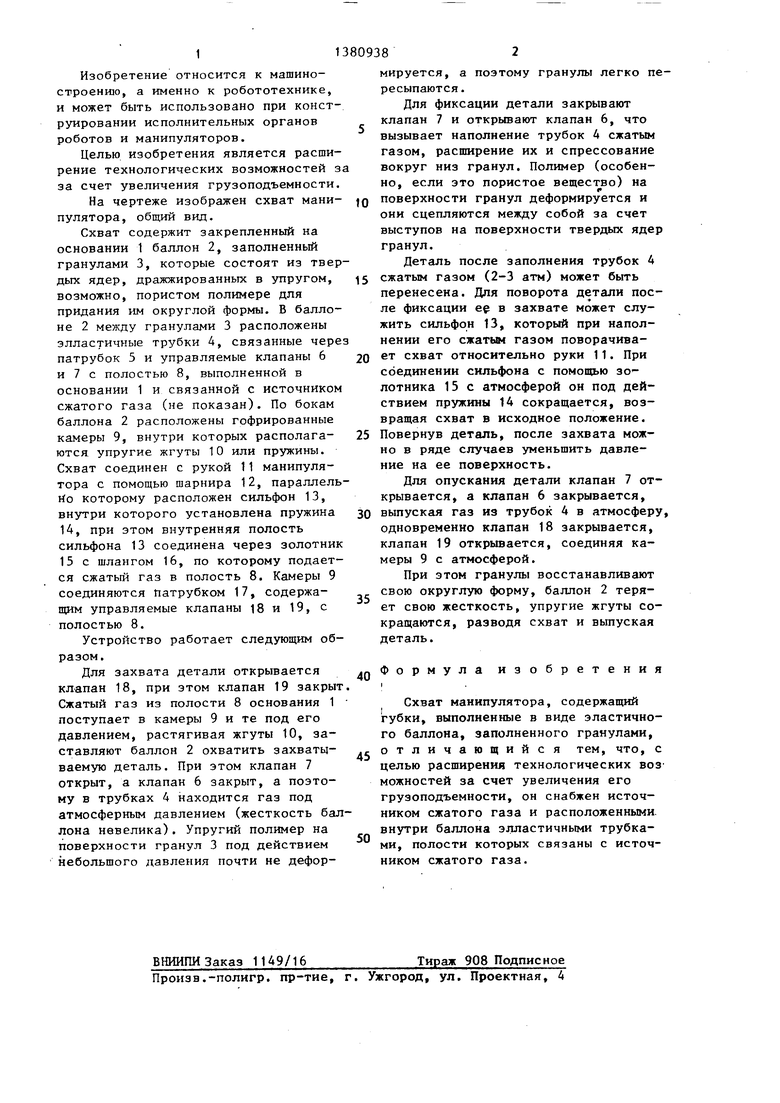
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора | 1988 |
|
SU1576310A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Универсальный схват робота | 1986 |
|
SU1393636A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Устройство для захвата детали | 1990 |
|
SU1815222A1 |
| Схват | 1990 |
|
SU1811477A3 |
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано при конструировании исполнительных органов роботов и манипуляторов. Целью изобретения является расширение технологических возможностей за счет увеличения грузоподъемности. Для захвата детали сжатый газ подается в гофрированные камеры 9, расположенные по бокам баллона 2, при этом происходит растягивание жгутов 10 и обхват захватываемой детали. Фиксация детали происходит при наполнении эластичных трубок 4, расположенных внутри баллона 2, газом, находящимся под давлением, что вызывает их расширение и спрессовывание вокруг них гранул 3, заполняющих баллон 1. Отпускание детали происходит после того, как из трубок 4 и камер 9 сжатый газ выпускается в атмосферу. 1 ил. с 
ВНИИПИ Заказ 1149/16
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Тираж 908 Подписное
| Исполнительный орган манипулятора | 1974 |
|
SU498156A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
