Изобретение относится к схватам роботов и манипуляторов.
Целью изобретения является расширение функциональных возможностей схвата за счет возможности разворота детали в схвате.
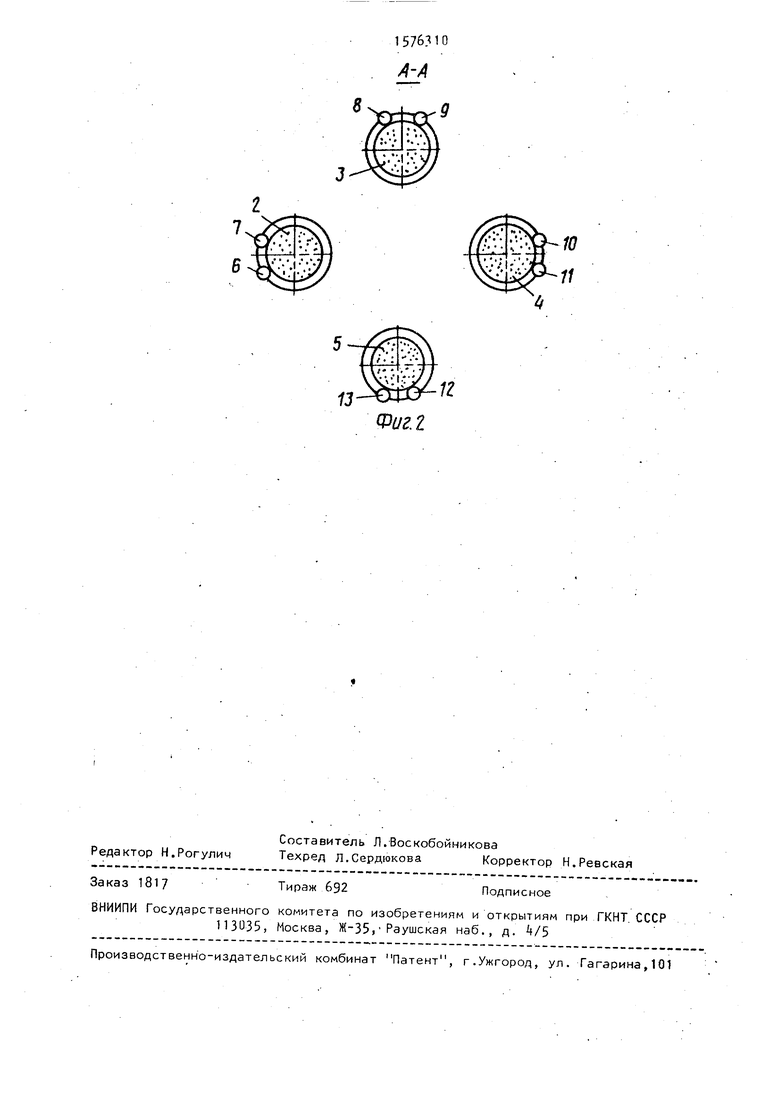
На фиг. 1 показан схват, общий вид в разрезе; на фиг. 2 - сечение А-А на фиг. 1.
Схват манипулятора включает корпус 1, на котором закреплены губки 2 - 5 выполненные в виде эластичных баллонов, заполненных сыпучим материалом и соединенных с вакуумной системой, устройство для сведения губок в виде глухих эластичных гофрированных трубок 6-13, закрепленных, с внешней стороны губок и соединенных с пневмосистемой, причем трубки на каждой губке схвата расположены симметрично относительно плоскости, проходящей через продольную ось схвата (фиг. 1).
Схват работает следующим образом.
В исходном положении схват разомкнут. При захватывании предмета во все гофрированные трубки подается газ под высоким давлением, губки схвата избегаются и захватывают предмет. Затем внутренние полости губок вакуумируются, обеспечивая фиксацию предмета. Для поворота
сл J
ээ
Ю
объекта относительно продольной оси схвата с сохранением удержания объекта давления в трубках 6 7, Ю и 11 стравливается, и губки 2 и 4 разжимаются. Одновременно прекращается вакуумирование внутренних полостей всех губок, стравливается давление в трубках 8 и 12 на губка 3 и 5, повышается давление в трубках 9 и 13 для сохранения силы захвата объекта и поворота губок с. захваченным объектом на некоторый угол против часовой стрелки, и подается высокое давление в трубки 6 и 10 губок 2 и Ц, в результате чего последние сходятся и одновременно поворачиваются на некоторый угол по часовой стрелке. Затем стравливается давление из трубок 9 и 13 на губках 3 и 5, при этом губки 3 и 5 разжимаются, высвобождая объект. Для дальнейшего поворота объекта подается высокое давление в трубки 7 и 11, затем стравливается давление из трубок 6 и 10 и подается в трубки 8 и 12, в результате чего губки 2 и и поворачиваются против часовой стрелки вместе с объектом, а губки 3 и 5 по часовой стрелке и захватывают объект.
Очередность операций повторяется. При этом количество губок может быть
5
0
5
0
кратным 2, 3, 4 и т.д., определяя тем самым минимальное число губок, постоянно удерживающих объект, и/или количество групп губок, действующих самостоятельно.
Формула изобретения
Схват манипулятора, содержащий корпус, смонтированные на нем губки схвата в виде эластичных баллонов, заполненных сыпучим материалом, и привод их перемещения в виде закрепленных на внешней стороне губок эластичных гофрированных трубок, расположенных с внешней стороны губок и соединенных с системой управления,, отличающийся тем, что, с целью расширения функциональных возможностей, гофрированные трубки расположены попарно на каждой губке схвата симметрично относительно плоскости, проходящей через продольную ось схвата и делящей каждую губку на две равные части, причем трубки, расположенные симметрично относительно продольной оси схвата, соединены с системой управления попарно,, каждая пара независимо от других, при этом количество губок образует четное число.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный схват | 1983 |
|
SU1121133A2 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Схват | 1986 |
|
SU1393628A1 |
| Схват манипулятора | 1986 |
|
SU1380938A1 |
| Схват манипулятора | 1987 |
|
SU1426785A1 |
| Схват манипулятора | 1986 |
|
SU1393629A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Захват манипулятора | 1975 |
|
SU556940A1 |
| Центрирующий схват | 1985 |
|
SU1283093A1 |
Изобретение относится к робототехнике и позволяет расширить функциональные возможности схвата за счет придания захваченному предмету одной степени подвижности при сохранении удержания предмета схватом. Схват манипулятора имеет корпус, губки схвата в виде эластичных баллонов, заполненных сыпучим материалом, внешнюю эластичную оболочку, устройство для сведения губок в виде гофрированных эластичных трубок, закрепленных по две на каждой губке с наружной стороны симметрично относительно плоскости, проходящей через продольную ось схвата и делящей губку на две равные части. При работе схвата губки могут захватывать предмет все одновременно. В случае необходимости поворота предмета губки захватывают предмет попарно (для схвата с четырьмя губками), изгибаясь в различных плоскостях за счет неодновременной подачи и регулирования давления в каждой из двух гофрированных трубок на каждой губке. При этом захваченный предмет поворачивается вместе с губками, удерживающими его, в то время как другая пара губок разведена и одновременно со сведением поворачивается в обратном направлении. 2 ил.
4
Ilk.
LJ I IIIIMI
Фиг.1
Редактор Н.Рогулич
Составитель Л.Воскобойникова
Техред л.СердюковаКорректор Н.Ревская
Заказ 181
Тираж 692
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35,- Раушская наб., д. k/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Фиг. г
Подписное
| Захват манипулятора | 1984 |
|
SU1207757A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
