2. Устройство по п. 1, отличающееся тем, что платформа снабжена элементами для освобождения закрепленного в отсеке транспортного средства контейнера, выполненными в виде ползунов, установленных с возможностью вертикального перемещения в пазах, выполненных по периметру платформы, и элементами для фиксации ползунов в верхнем положении, связанными с серденичками
1
Изобретение относится к технич с кому обслуживанию транспортных средств, в частности к обслуживанию автоматических аккумуляторных транспортных средств, которые снабжены двумя группами электрических аккумуляторов, работающих параллельно на общую нагрузку, и предназначены для работы в составе безлюдных гибких автоматизированных производств в любых отраслях народного хозяйства.
Цель изобретения - повышение производительности труда при обслуживании автомобилей, снабженных отсеками для контейнеров с аккумуляторами.
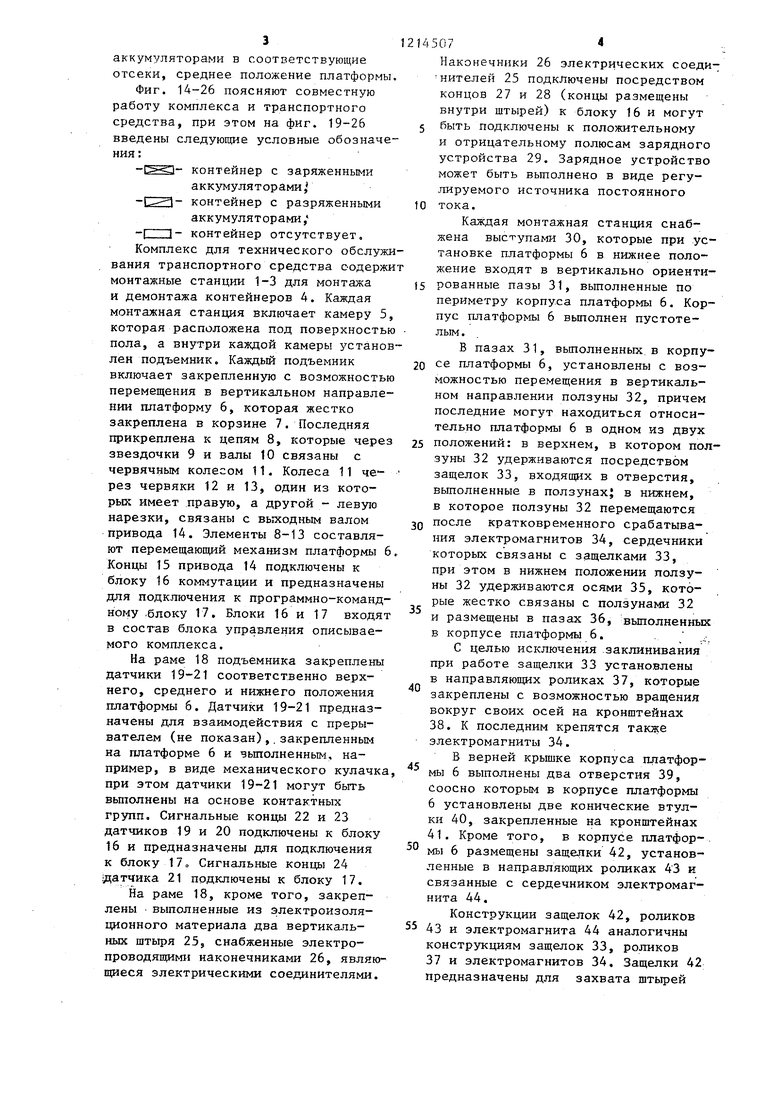
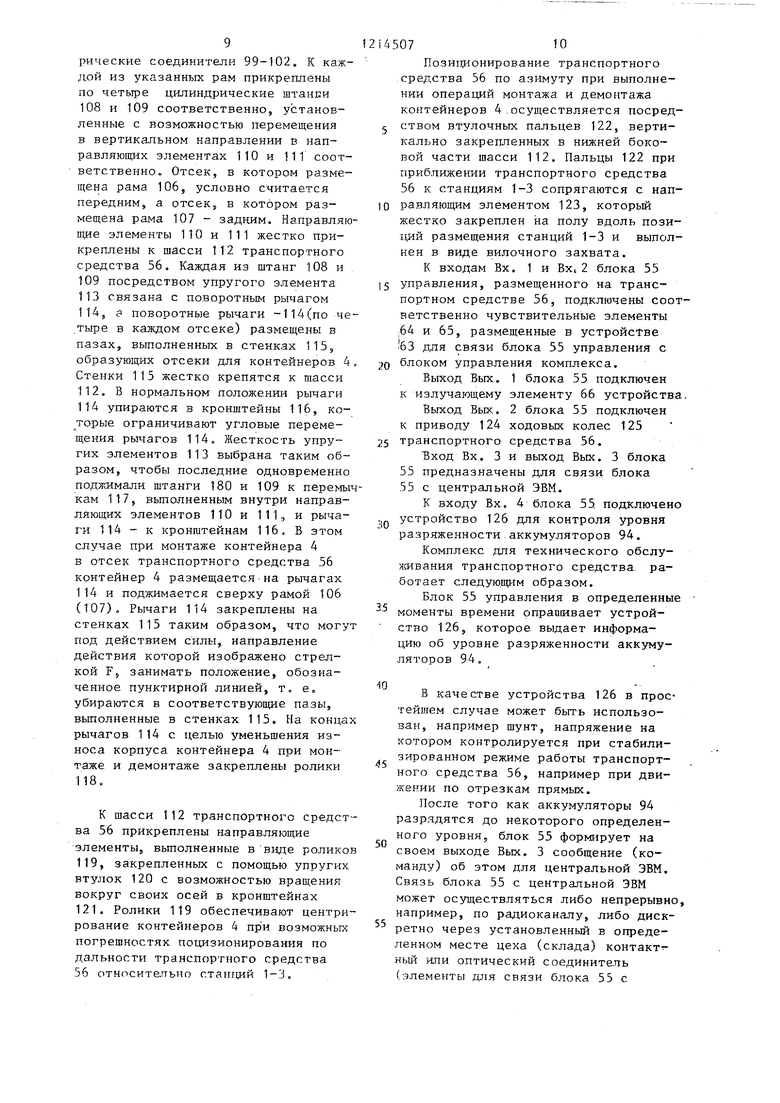
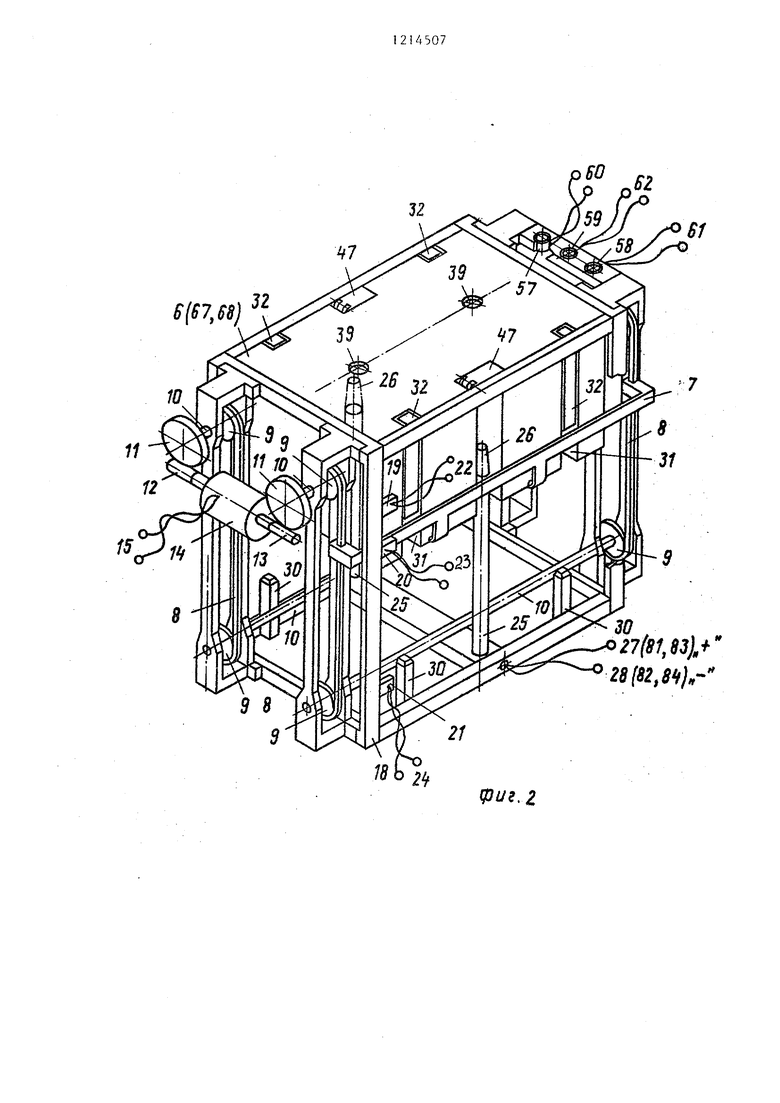
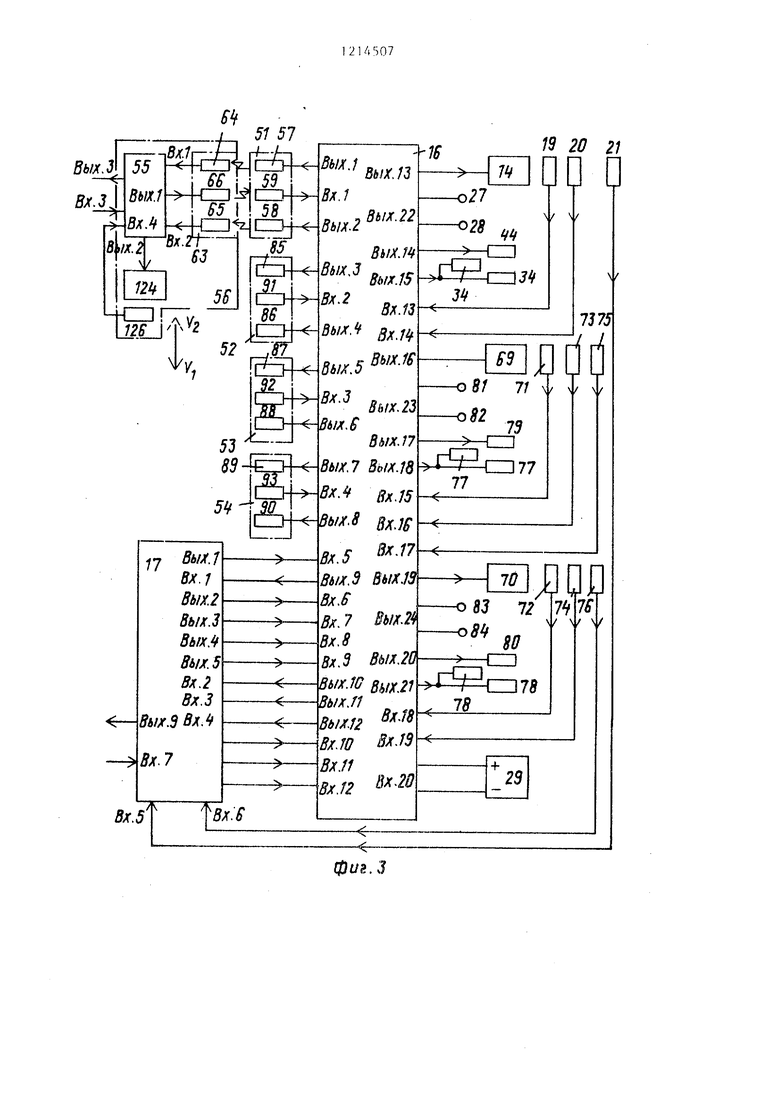
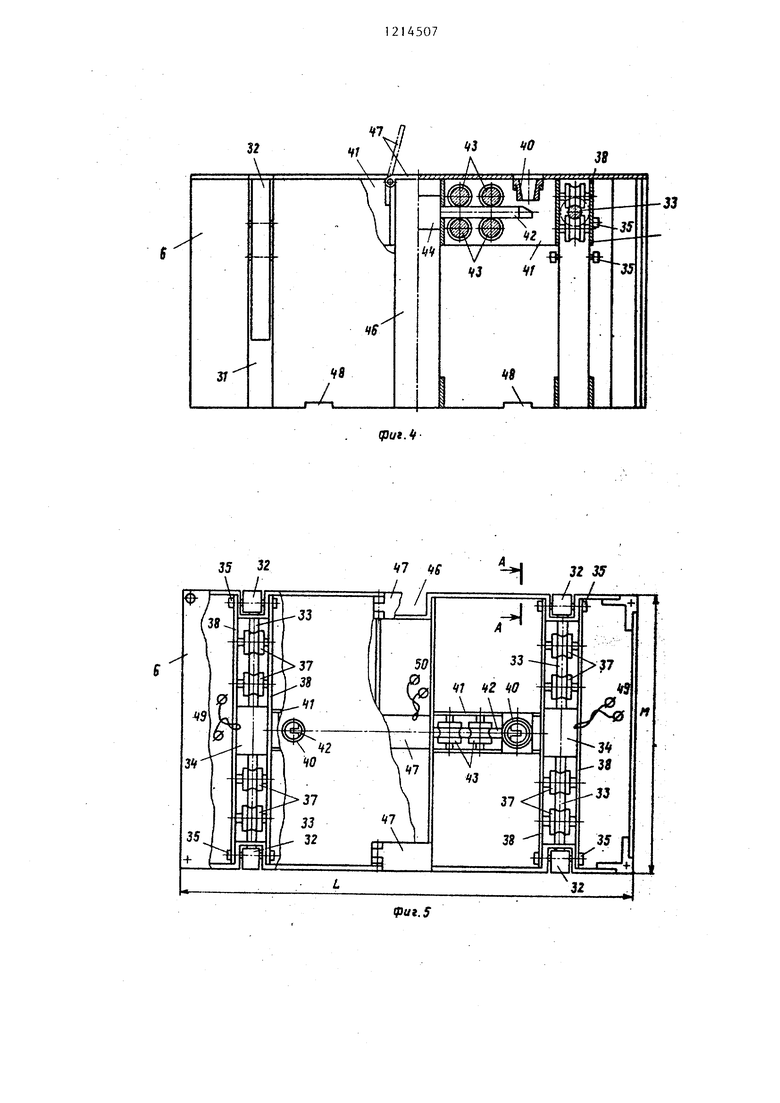
Да фиг. 1 изображен комплекс для технического обслуживания транспортного средства (последнее изображено штрихпунктирной линией), общий вид на фиг. 2 - конструкция подъемника монтажной станции; на фиг. 3 - функциональная блок-схема комплекса для технического обслуживания транспортного средства на фиг. 4 - конструкция платформы подъемника, вид спереди, на фиг. 5 то же, вид сверху; на фиг. 6 - разрез А-А на фиг. 5; на фиг. 7 - то же, при опущенном ползуне,- на фиг. 8 - положение элементов фиксации ползунов при срабатывании электромагнитов; на фиг. 9 - конструкция контейнера для аккумуляторов, вид спереди; на фиг. 10 - то же, вид сверху, на фиг. 11 - вид Б на фиг. 9, на фиг. 12 - конструкция транспортного средства, обслужива14507
электромагнитов, обмотки которых подключены к блоку управления, а в каждой камере монтажной станции выполнены выступы для перемещения ползунов при подъеме платформы.
3. Устройство по п. 1, о т л и - чающееся тем, что электрические соединители монтажной станции выполнены в виде вертикальных штырей, размещенных в пазах каждой платформы.
ние которого осуществляется посредством предлагаемого комплекса; на фиг. 13 - разрез В-В на фиг. 12-, на фиг, 14 - положение переднего
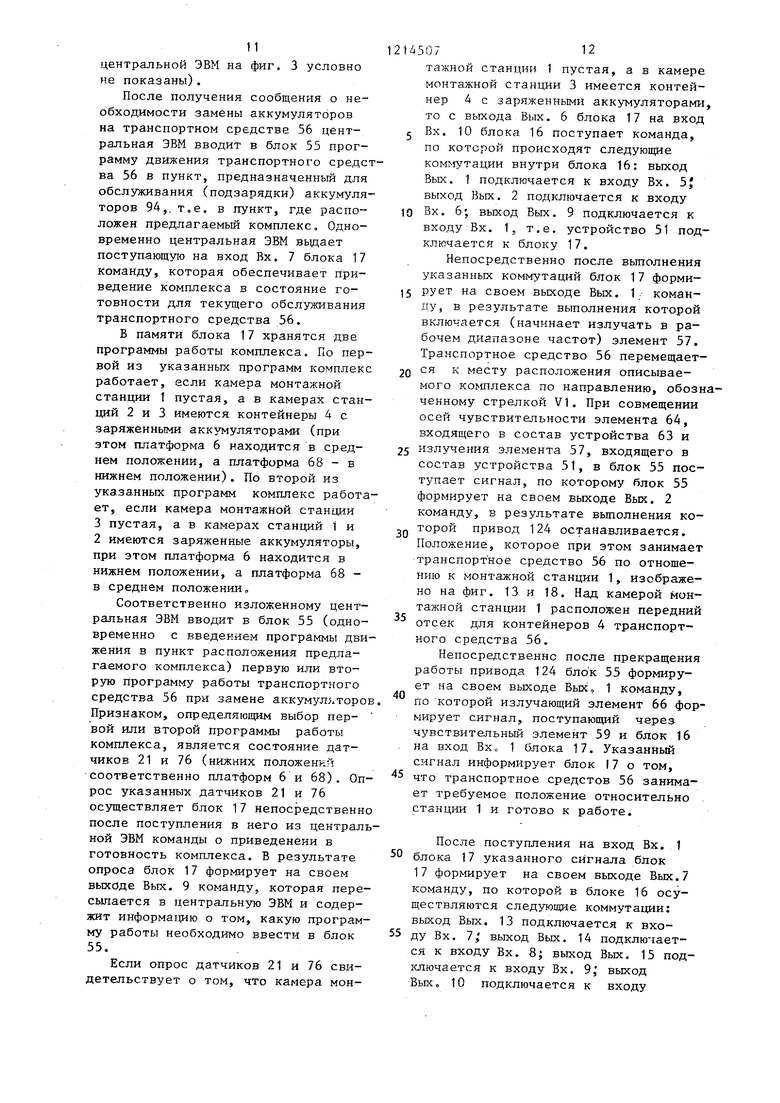
отсека для контейнеров транспортного средства над камерой монтажной.станции, на фиг. 15 - жесткое скрепление контейнера с пластформой; на фиг. 16 - момент срабатывания датчика нижнего положения платформы и взаимное расположение переднего отсека транспортного средства и платформы с контейнером с заряженным аккумулятором; на фиг. 17 - нижнее
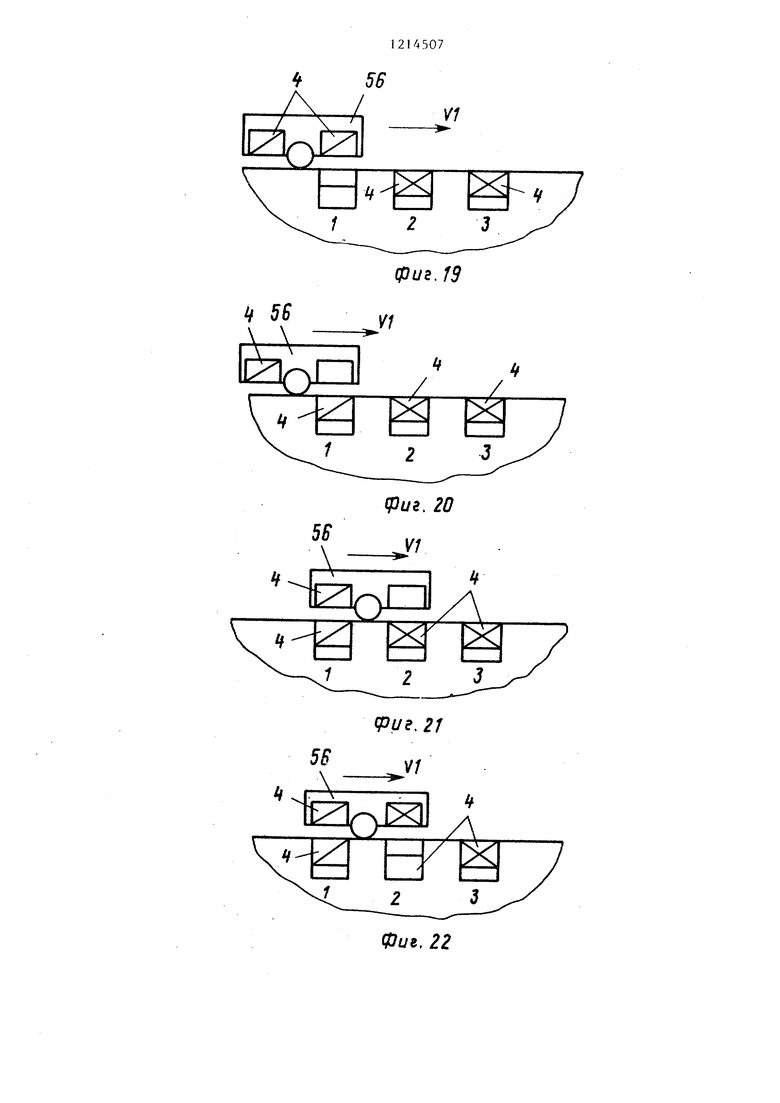
положение ползуна при верхнем положении платформы; на фиг. 18 - верхнее положение ползунов при нижнем положении платформы; на фиг. 19 - схематическое изображение положения, соответствующего изображению на фиг. 14, на фиг. 20 - то же, соответствующего изображению на фиг. 16 на фиг. 21 - то же, положение переднего пустого отсека для
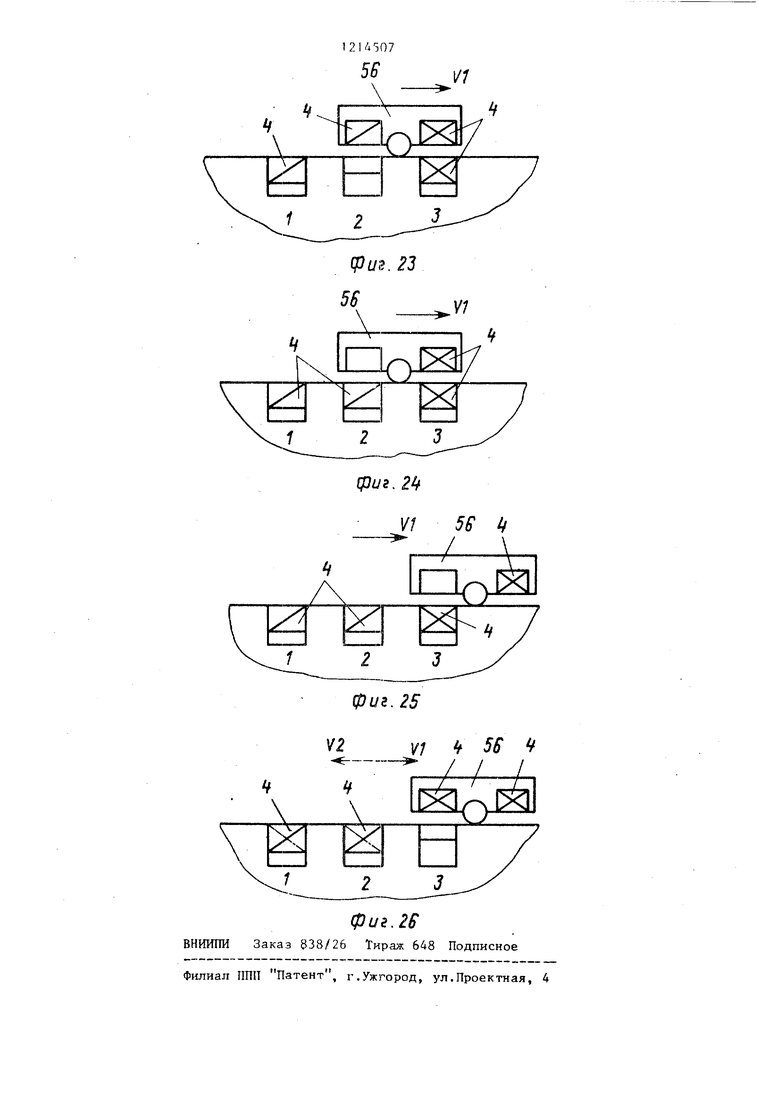
контейнеров над камерой монтажной станции, на фиг, 22 - то же, среднее положение платформы; на фиг. 23 - то же, положение заднего отсека транспортного средства с разряженным контейнером над камерой монтажной станции; на фиг. 24 - то же, положение в конце выгрузки контейнера из заднего отсека на фиг, 25 - то же, положение пустого
отсека транспортного средства над станцией, в камере которой находится контейнер с заряженным аккумулятором , на фиг. 26 - то же, положение установки контейнеров с заряженными
3
аккумуляторами в соответствующие отсеки, среднее положение платформы,
Фиг. 14-26 поясняют совместную работу комплекса и транспортного средства, при этом на фиг. 19-26 введены следующие условные обозначения :
-схд- контейнер с заряженными аккумуляторами,
контейнер с разряженными аккумуляторами,
-( |- контейнер отсутствует.
Комплекс для технического обслуживания транспортного средства содержи монтажные станции 1-3 для монтажа и демонтажа контейнеров Д. Каждая монтажная станция включает камеру 5, которая расположена под поверхностью пола, а внутри каждой камеры установлен подъемник. Каждый подъемник включает закрепленную с возможностью перемещения в вертикальном направлении платформу 6, которая жестко закреплена в корзине 7. Последняя прикреплена к цепям 8, которые через звездочки 9 и валы 10 связаны с червячным колесом 11, Колеса 11 че- рез червяки 12 и 13, один из которых имеет правую, а другой - левую нарезки, связаны с выходным валом привода 14. Элементы 8-13 составляют перемещающий механизм платформы 6 Концы 15 привода 14 подключены к блоку 16 коммутации и предназначены для подключения к программно-командному .блоку 17. Блоки 16 и 17 входят в состав блока управления описываемого комплекса.
На раме 18 подъемника закреплены датчики 19-21 соответственно верхнего, среднего и нижнего положения платформы 6. Датчики 19-21 предназначены для взаимодействия с прерывателем (не показан),,закрепленным на платформе 6 и выполненным, например, в виде механического кулачка при этом датчики 19-21 могут быть вьптолнены на основе контактных групп. Сигнальные концы 22 и 23 датчиков 19 и 20 подключены к блоку 16 и предназначены для подключения к блоку 17, Сигнальные концы 24 .датчика 21 подключены к блоку 17.
На раме 18, кроме того, закреплены выполненные из электроизоляционного материала два вертикальных штьфя 25, снабженные электропроводящими наконечниками 26, являющиеся электрическими соединителями.
Наконечники 26 электрических соеди- нителей 25 подключены посредством концов 27 и 28 (концы размещены внутри штырей) к блоку 16 и могут
быть подключены к положительному и отрицательному полюсам зарядного устройства 29. Зарядное устройство может быть вьтолнено в виде регулируемого источника постоянного
тока.
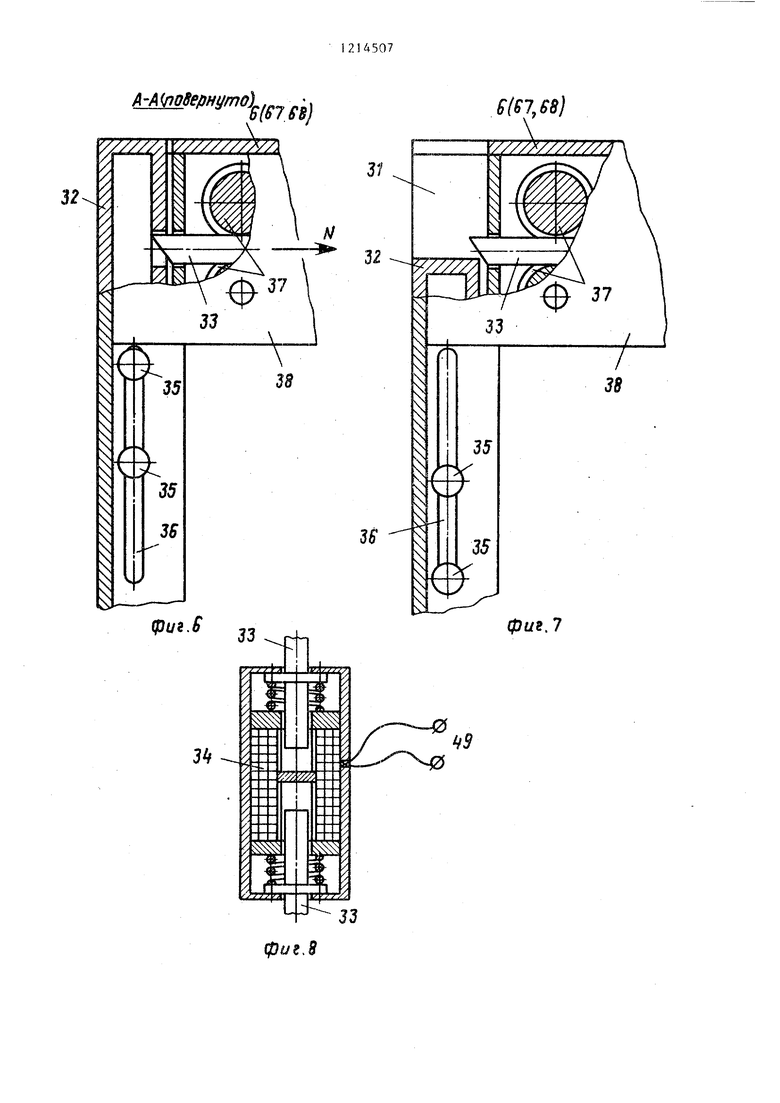
Каждая монтажная станция снабжена выступами 30, которые при установке платформы 6 в нижнее положение входят в вертикально ориентированные пазы 31, выполненные по периметру корпуса платформы 6. Корпус платформы 6 вьшолнен пустотелым.
В пазах 31, выполненных в корпусе платформы 6, установлены с возможностью перемещения в вертикальном направлении ползуны 32, причем последние могут находиться относительно платформы 6 в одном из двух
положений: в верхнем, в котором ползуны 32 удерживаются посредством защелок 33, входящих в отверстия, вьшолненные в ползунах в нижнем, в которое ползуны 32 перемещаются
после кратковременного срабатывания электромагнитов 34, сердечники которых связаны с защелками 33, при этом в нижнем положении ползуны 32 удерживаются осями 35, которые жестко связаны с ползунами 32 и размещены в пазах 36, выполненных в корпусе платформы 6. . J ,- С целью исключения заклинивания при работе защелки 33 установлены в направляющих роликах 37, которы(е закреплены с возможностью вращения вокруг своих осей на кронштейнах 38. К последним крепятся также электромагниты 34.
В верней крышке корпуса платформы 6 выполнены два отверстия 39, соосно которым в корпусе платформы 6 установлены две конические втулки 40, закрепленные на кронштейнах 41. Кроме того, в корпусе платфор-.
мы 6 размещены защелки 42, установленные в направляющих роликах 43 и связанные с сердечником электромагнита 44.
Конструкции защелок 42, роликов
43 и электромагнита 44 аналогичны конструкциям защелок 33, роликов 37 и электромагнитов 34. Защелки 42 предназначены для захвата штьфей
45j закрепленных на нижней поверхноти контейнера 4 для аккумуляторов,
В корпусе платформы 6 с боковых сторон вьшолнены два вертикальных паза 46 (см, фиг. 4 и 5), в которых размещены штыри 25, При нахождении платформы 6 в верхнем и среднем положениях пазы 46 закрыты крышками 4 (для защиты от попадания в камеры посторонних предметов)j а при перемещении платформы- 6 в вдшнее положение крьшки 47 отклоняются штыря 15И 25 и занимают положения, указанные штрихпунктирной линией
Пазы 48, выполненные в корпусе платформы 6s предназначены для центрирования последней в корзине 7.
Ко.нцы 49 и 50 обмоток соответственно электромагнитов 34 и 44 подключены к блоку 16 и предназначены дли подключения к блоку 17. Вдоль позиций размещения монтажных станци 1-3 равномерно размещены идентичные по конструкции устройства для связи блока 17 с блоком 55 управле- мия (последний установлен на транспортном средстве 56), Устройства подключены к блока 16 и могут быть подключены поочередно к блоку 17„
Устройство 51 содержит два излу- 1ающих элемента 57 и 58 (например излучающ 1е диоды) и один чувстви- Т12льный элемент 59 (например, фот-о диод)5 оси излучения (чувствительности) которых ориентированы верти- ка.чьног а сигнальные концы 61-62 соответственно элементов 57-59 подключены к блоку 16,
На транспортном средстве 56 размещено устройство 63 для связи-,, сопрягаемое при работе комплекса с устройствами 51-54, Конструктивно устройство 63 вьшолнено аналогично устройствам 51-54 и содержит два чувствительных элемента 64 и 65 и один излучающий элемент 66, оси чувствительности которых ориентированы вертикально. Элементы 64-66 в устройстве 63 и устройство 63 на транспортном средстве 56 размещены таким образом, что при вьшолнении операции монтажа и демонтажа контейнеров 4 устройство 63 оказьгеается расположено над одним из устройств 51--54j при этом чувствительные и излучающие элементы обоих сопряженных устройств расположены попарно
соосно, например на фиг. 3 попарно сопряжены элементы 57 и 64,, 59 и 66, 58 и 65.
Шаги размещения монтажных станций 1-3, а также устройств 51-54 равны шагу размещения контейнеров 4 на транспортном средстве 56.
Как было отмечено, станции 2 и 3
конструктивно вьшолнены идентично станции 1 и содержит соответственно платформы 67 и 68, приводы 69 и 70, датчики 71 и 72 верхнего, 73 и 74 среднего, 75 и 76 нижнего положе ния платформ 67 и 68, электромагниты 77 и 78 для фиксации ползунов 32 платформ 67 и 68, электромагниты 79 и 80 для захвата платфор- 67 и 68 контейнеров 4. Кроме
того, к электрическим соединителям станций 2 и 3 подключены соответственно концы 81 и 82, 83 и 84, соединенные с блоком 16 и предназначенные для подключения к положительному и отрицательному полюсам зарядного устройства 29.
Устройства 52-54 для связи по аналогии с устройством 51 включают соответственно излучающие элементы
85 и 86, 87 и 88, 89 и 90, а также чувствительные элементы 91-93.
Блок 16 коммутации и программно- командный блок 17 обеспечивают
взаимосвязанное функционирование
всех устройств и элементов рассматриваемого комплекса. Блок 16 включает набор устройств, осуществляющих поочередное (в соответствии с
программой, заложенной в блок 17) подключение исполнительньк устройств и чувствительных элементов стан- 15ИЙ 1-3 и устройств 51-54 к блоку 17j а также подключение обслуживаемьпс контейнеров (концов 27 и 28,81 и 82, 83 и 84) к зарядному блоку 29.
Блок 17 включает программно-командное устройство (контроллер), которое в соответствии с введенной
и него программой управляет работ той комплекса, причем работу блока 17 координирует центральная ЭВМ, например ЭВМ, управляющая работой автоматизированного склада или механообраб.атывающего цеха.
К входам Вх. 1 - ВХо 4 блока 16 подключены чувствительные элементы 59 и 91-93.
7
Выходы Вых. 1 - Вых. 8 блока 16 подключены соответственно к излучающим элементам 57, 58 и 85-90.
К входам Вх. 5 - Вх,12 блока 16 подключены соответственно выходы Вых. 1 - Вык. 8 блока 17.
Выходы Вых. 9 - Вых. 12 блока 16 подключены к входам Вх. 1- - Вх. 4 блока 17.
К выходу Вых. 13 блока 16 подключен привод 14 платформы 6 (см. фиг. 3) .
К выходам Выз. 14 и Вых. 15 подключены соответственно электромагниты 44 и 34, размещенные на платформе 6..
К входам Вх. 13 и Вх. 14 блока 1б подключены соответственно датчик 19 верхнего и датчик 20 среднего положения платформы 6.
Выход Вых. 16 блока 16 подключен к приводу 69 платформь 67„
Выходы Вых. 17 и вых. 18 блока 16 подключены соответственно к электромагнитам 79 и 77, размещенны на платформе 67.
К входам Вх, 15 - Вх. 17 блока 16 подключены датчики 71 верхнего, 73 среднего и датчик 75 нижнего положений платформы 67.
Выход Вьк. 19 блока 16 подключен к приводу 70 платформы 68.
Выходы Вых. 20 и Вых. 21 блока 16 подключены соответственно к электромагнитам 80 и 78, размещенны на платформе 68.
К входам Вх. 18 и Вх. 19 блока 16 подключены соответственно датчик 72 верхнего и 74 среднего положений платформы 68.
К входу 20 блока 16 подключено зарядное устройство 29.
Выходы Вых. 22 - Вых. 24 блока
16связаны соответственно с концами 27 и 28, 81 и 82, 83 и 84 (зарядными цепями) электрических соединителей, установленных в камерах станций 1-3,
К входам Вх. 5 и Вх. 6 блока 17 подключены соответственно, датчик 21 нижнего положения платформы 6 и датчик 76 нижнего положения платформы 68.
Вход Вх. 7 и выход Вых. 9 блока
17предназначены для подключения к центральной ЭВМ (на фиг. 3 не показана) .
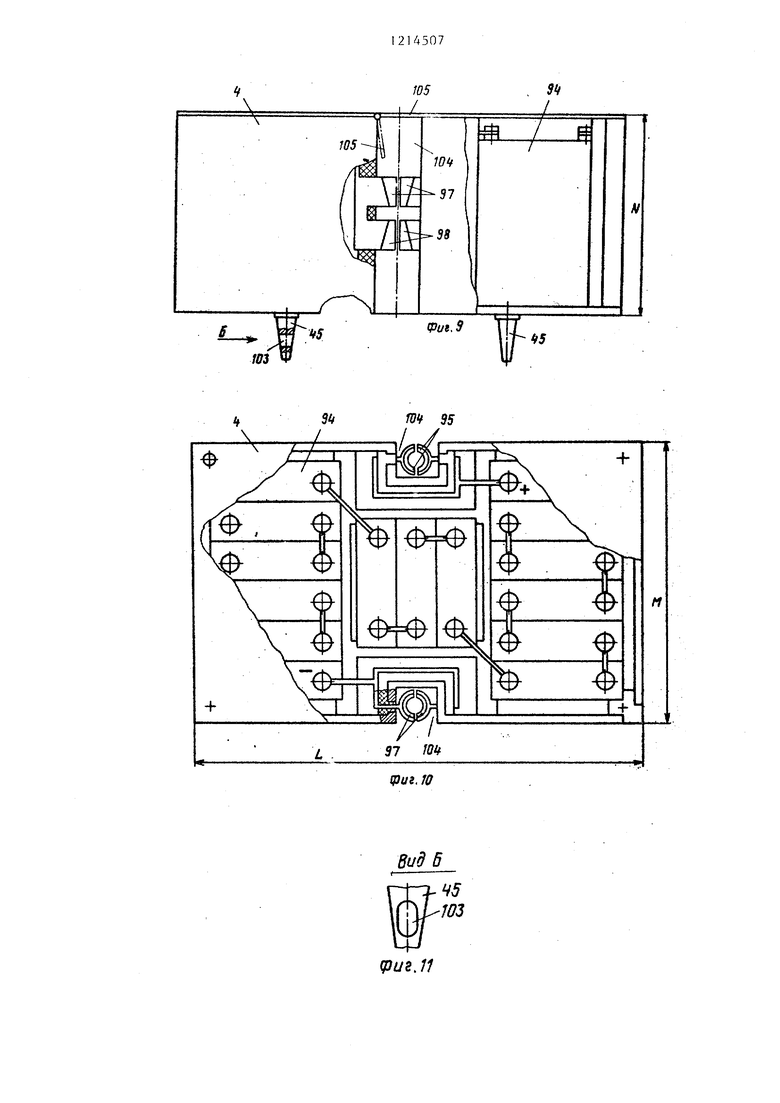
Контейнер 4 выполнен пустотелым, и в нем размещены электрические ак-
14507 . 8
кумуляторы 94. Контейнер 4 снабжен двумя группами электрических соединителей 95, 96 и 97, 98, к которым подключены соответственно положи5 тельный и отрицательный выводы аккумуляторов 94. Электрические соединители 95-98 выполнены в виде разрезных конических втулок и предназначены для сочленения либо с соедини10 телями 25 при подзарядке аккумуляторов в камерах 5 станций 1-3, либо для сочленения с электрическими соединителями 99-102 при монтаже контейнеров 4 с аккумуляторами 94 в
5 отсеки транспортного средства 56.
В нижней части контейнера 4 закреплены штыри 45 конической формы, которые являются направляющими элементами и при захвате контейнера 4
20 платформой 6 (67, 68) сопрягаются с втулками 40, закрепленными в корпусе платформы 6. Штьфи 45 снабжены отверстиями 103, в которые входят защелки 42 платформы 6 (67, 68)
25 при взаимодействии последней с контейнерами 4.
Размеры L и М контейнера 4 выбраны равными размерам L и М платформы 6. Вертикальный размер N конjg тейнера 4 выбран из условия размещения последнего в камере 5 при обслуживании заподлицо с поверхностью пола..
Размеры пазов 104 контейнера 4 выбраны из условия обеспечения свободного перемещения крыщек 47 платформы 6 под действием штырей 25.
Контейнер 4 снабжен подпружиненными крышками (на фиг. 10 и 12 крьш- ки 105 условно не показаны), которые закреплены с возможностью углового перемещения внутрь пазов 104. Указанное перемещение крьш1ек 105 происходит под действием соединителей 99-102 при монтаже контейнера 4 в отсек транспортного средства 56. Крьш1ки 105, также как и крьшгки 47, закрепленные на платформе 6, зашрщают камеру 5 от попадания посторонних предметов через пазы 104
при обслуживании контейнеров 4 с аккумуляторами 94,
Транспортное средство 56 содержит два идентичных отсека для контейнеров 4 с аккумуляторами 94,
55 Каждый отсек оснащен механизмом для закрепления контейнера 4. Указанные механизмы включают рамы 106 и 107, на которых закреплены элект35
40
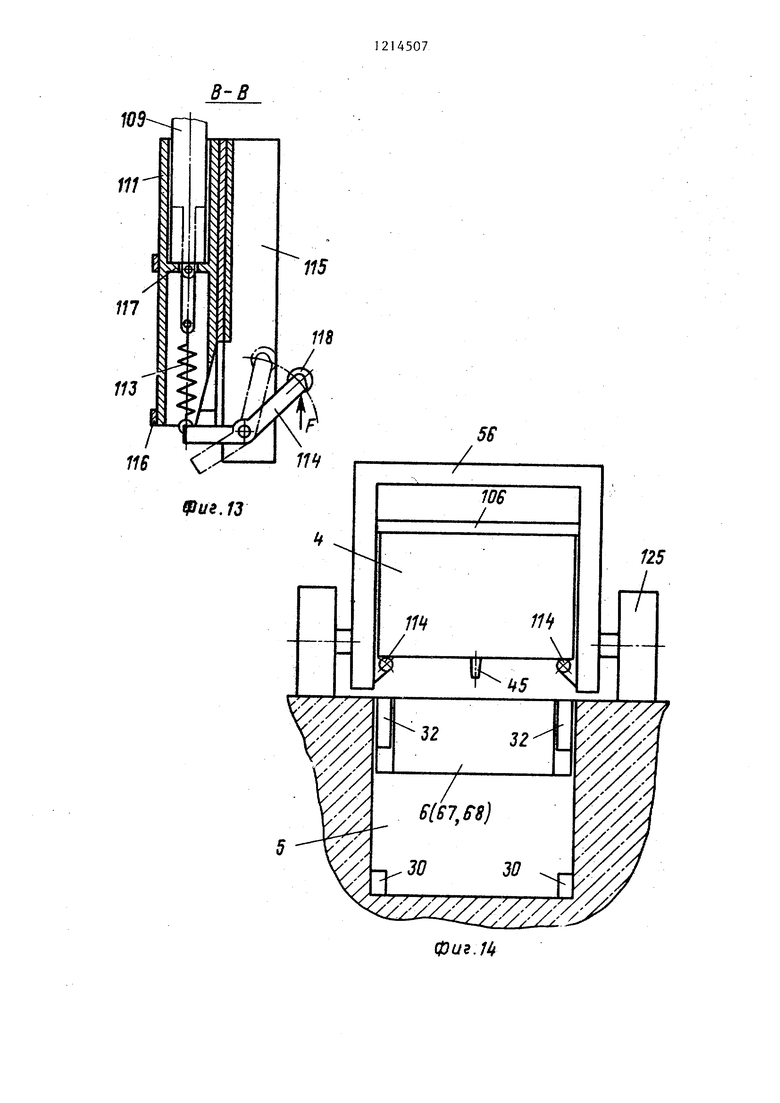
рические соединители 99-102. К каждой из указанных рам прикреплены по четыре цилиндрические штанпи
108и 109 соответственно, установленные с возможностью перемещения в вертикальном направлении в направляющих элементах 110 и 111 соответственно „ Отсек, в котором размещена рама 106, условно считается передним, а отсек, в котором размещена рама 107 - задним. Направляющие элементы 110 и 111 жестко прикреплены к шасси 112 транспортного средства 56. Каждая из штанг 108 и
109посредством упругого элемента
113связана с поворотным рычагом 114, а поворотные рычаги -114(по четыре в каждом отсеке) размещены в пазах, выполненных в стенках 115, образующих отсеки для контейнеров 4 Стенки 115 жестко крепятся к шасси 112, В нормальном положении рычаги
114упираются в кронштейны 116, которые ограничивают угловые перемещения рычагов 114, Жесткость упругих элементов 113 выбрана таким образом, чтобы последние одновременно поджимали штанги 180 и 109 к перемыкам 117 5 вьтолненным внутри направляющих элементов 110 и 111,, и рычаги 114 - к кронштейнам 116. В этом случае при монтаже контейнера 4
в отсек транспортного средства 56 контейнер 4 размещаетсяна рычагах 114 и поджимается сверху рамой 106 (107)о Рычаги 114 закреплены на стенках 115 таким образом, что могу под действием силы, направление действия которой изображено стрелкой F, занимать положение, обозначенное пунктирной линией, т, е, убираются в соответствующие пазы, выполненные в стенках 115. На конца рычагов 114 с целью уменьшения износа корпуса контейнера 4 при монтаже и демонтаже закреплены ролики 118,
К шасси 112 транспортного средства 56 прикреплены направляющие элементы, вьшолненные в В1аде ролико 119, закрепленных с помощью упругих втулок 120 с возможностью враш,ения вокруг своих осей в кронштейнах 121. Ролики 119 обеспечивают центрирование контейнеров 4 пр и возможных погрешностях поцизионирования по дальности транспортного средства 56 относитеггьно стан/щи 1-3,
1450710
Г1ози151онирование транспортного .средства 56 по азимуту при выполнении операций монтажа и демонтажа контейнеров 4.осуществляется посред- J ством втулочных пальцев 122, вертикально закрепленных в нижней боковой части шасси 112. Пальцы 122 при приближении транспортного средства 56 к станциям 1-3 сопрягаются с нап- 10 равляющим элементом 123, который
жестко закреплен на полу вдоль позиций размещения станций 1-3 и выполнен в виде вилочного захвата.
К входам Вх, 1 и Bxi 2 блока 55 15 управления, размещенного на транспортном средстве 56, подключены соответственно чувствительные элементы ;64 и 65, размещенные в устройстве i63 для связи блока 55 управления с ;)Q блоком управления комплекса.
Выход Вых. 1 блока 55 подключен к излучающему элементу 66 устройства,
Выход Вых. 2 блока 55 подключен к приводу 124 ходовых колес 125 25 транспортного средства 56.
Бход Вх. 3 и выход Вых. 3 блока 55 предназначены для связи блока 55 с центральной ЭВМ.
К входу Вх. 4 блока 55 подключено устройство 126 для контроля уровня разряженности аккумуляторов 94.
Комплекс для технического обслу- ясивания транспортного средства, работает следую.щим образом,
Блок 55 управления в определенные моменты времени опрашивает устройство 126, которое выдает информацию об уровне разряженности аккумуляторов 94,
Ю
В качестве устройства 126 в простейшем случае может быть использован, например шунт, напряжение на котором контролируется при стабилизированном режиме работы транспортного средства 56, например при движении по отрезкам прямых.
После того как аккумуляторы 94 разрядятся до некоторого определенного уровня, блок 55 формирует на своем выходе Вых, 3 сообщение (команду) об этом для центральной ЭВМ. Связь блока 55 с центральной ЭВМ может осуществляться либо непрерывно, например, по радиоканалу, либо дискретно через установленный в определенном месте цеха (склада) контакт- ньй или оптический соединитепь {элементы для связи блока 55 с
30
50
55
11
центральной ЭВМ на фиг. 3 условно не показаны).
После получения сообщения о необходимости замены аккумуляторов на транспортном средства 56 центральная ЭВМ вводит в блок 55 программу движения транспортного средства 56 в пункт, предназначенный для обслуживания (подзарядки) аккумуляторов 94,, т.е. в пункт, где расположен предлагаемьш комплекс. Одновременно центральная ЭВМ вьщает поступающую на вход Вх. 7 блока 17 команду, которая обеспечивает приведение комплекса в состояние готовности для текущего обслуживания транспортного средства 56.
В памяти блока 17 хранятся две программы работы комплекса. По первой из указанных программ комплекс работает, если камера монтажной станции 1 пустая, а в камерах станций 2 и 3 имеются контейнеры 4 с заряженными аккумуляторами (при этом платформа 6 находится в среднем положении, а платформа 68 - в нижнем положении). По второй из указанных программ комплекс работает, если камера монтажной станции 3 пустая, а в камерах станций 1 и 2 имеются заряженные аккумуляторы, при этом платформа 6 находится в нижнем положении, а платформа 68 - в среднем положении„
Соответственно изложенному центральная ЭВМ вводит в блок 55 (одновременно с введением программы движения в пункт расположения предлагаемого комплекса) первую или вторую программу работы транспортного средства 56 при замене аккумул.торо Признаком, определяющим выбор первой или второй программы работы комплекса, является состояние датчиков 21 и 76 (нижних положений соответственно платформ 6 и 68). Опрос указанных датчиков 21 и 76 осуществляет блок 17 непосредственн после поступления в него из централной ЭВМ команды о приведенеии в готовность комплекса. В результате опроса блок 17 формирует на своем выходе Вых. 9 команду, которая пересылается в центральную ЭВМ и содержит информацию о том, какую программу работы необходимо ввести в блок 55.
Если опрос датчиков 21 и 76 свидетельствует о том, что камера мон1450712
тажной станции 1 пустая, а в камере монтажной станции 3 имеется контейнер 4 с заряженными аккумуляторами, то с выхода Вых. 6 блока 17 на вход
5 Вх. 10 блока 16 поступает команда, по которой происходят следующие комм1, тации внутри блока 16: выход Вых. 1 подключается к входу Вх. 5J выход Вых. 2 подключается к входу
10 Вх. 6; выход Вых. 9 подключается к входу Вх. Ij т.е. устройство 51 подключается к блоку 17,
Непосредственно после вьтолнения указанных коммутаций блок 17 форми15 рует на своем выходе Вых. 1. команду, в результате выполнения которой включается (начинает излучать в рабочем диапазоне частот) элемент 57, Транспортное средство 56 перемещает2Q ся к месту расположения описываемого комплекса по направлению, обозначенному стрелкой VI. При совмещении осей чувствительности элемента 64, входящего в состав устройства 63 и
25 излучения элемента 57, входящего в состав устройства 51, в блок 55 поступает сигнал, по которому блок 55 формирует на своем выходе Вых. 2 команду, в результате вьтолнения которой привод 124 останавливается. Положение, которое при этом занимает транспортное средство 56 по отношению к монтажной станции 1, изображено на фиг. 13 и 18. Над камерой монтажной станции 1 расположен передний отсек для контейнеров 4 транспортного средства 56.
Непосредственно после прекращения работы привода 124 бло к 55 формирует на своем выходе Вых, 1 команду, по которой излучающий элемент 66 формирует сигнал, поступающий через чувствительный элемент 59 и блок 16 на вход Вхо 1 блока 17. Указанный сигнал информирует блок 17 о том,
45 что транспортное средстов 56 занимает требуемое положение относительно станции 1 и готово к работе,
После поступления на вход Вх, 1 50 блока 17 указанного сигнала блок 17 формирует на своем выходе Вых,7 команду, по которой в блоке 16 осуществляются следующие коммутации: выход Вых. 13 подключается к вхо- 55 ду Вх. 7, выход Вых. 14 подключается к входу Вх. 8; выход Вых. 15 подключается к входу Вх. 9, выход Вых, 10 подключается к входу
30
40
13
Вх. 13; выход Вых. 11 подключается к входу Вх. 14.
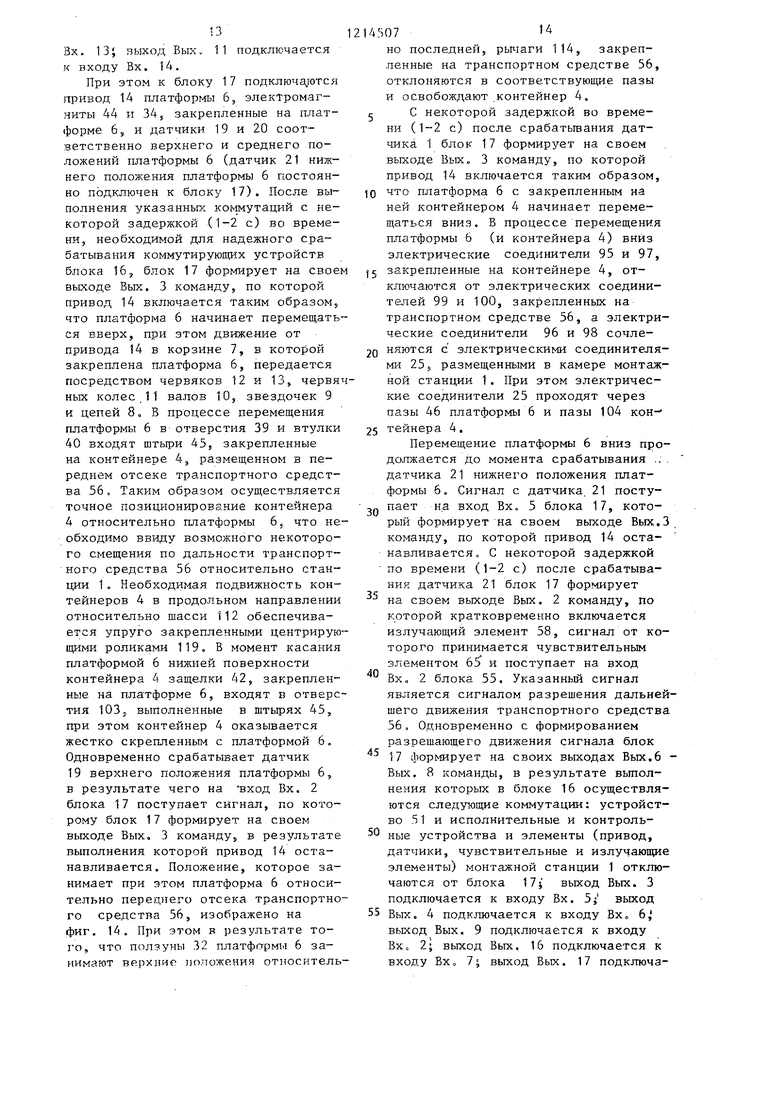
При этом к блоку 17 подключаются привод 14 платформы 6, электромагниты 44 и 34 5 закрепленные на платформе 6, и датчики 19 и 20 соответственно верхнего и среднего положений платформы 6 (датчик 21 нижнего положения платформы 6 постоянно подключен к блоку 17). После выполнения указанных коммутаций с некоторой задержкой (1-2 с) во времени, необходимой для надежного срабатывания коммутирующих устройств блока 16, блок 17 формирует на свое выходе Вых. 3 команду, по которой привод 14 включается таким образом, что платформа 6 начинает перемещаться вверх, при этом движение от привода 14 в корзине 7, в которой закреплена платформа 6, передается посредством червяков 12 и 13, червя ньк колес , 11 валов 10, звездочек 9 и цепей 8, В процессе перемещения платформы 6 в отверстия 39 и втулки 40 входят штыри 45, закрепленные на контейнере 4, размещенном в переднем отсеке транспортного средства 56. Таким образом осуществляется точное позиционирование контейнера 4 относительно платформы 6, что необходимо ввиду возможного некоторого смещения по дальности транспортного средства 56 относительно станции 1. Необходимая подвижность контейнеров 4 в продольном нап1)авлении относительно шасси 112 обеспечивается упруго закрепленными центрирующими роликами 119. В момент касания платформой 6 нижней поверхности контейнера 4 защелки 42, закрепленные на платформе 6, входят в отверстия 103s выполненные в штьфях 45, при этом контейнер 4 оказывается жестко скрепленным с платформой 6. Одновременно срабатывает датчик 19 верхнего положения платформы 6, в результате чего на вход Вх. 2 блока 17 поступает сигнал, по которому блок 17 формирует на своем выходе Вых, 3 команду5 в результате выполнения которой привод 14 останавливается. Положение, которое занимает при этом платформа 6 относительно перец)его отсека транспортного средства 56, изображено на фиг. 14. При этом в результате того, что ползуны 32 платформы 6 за- н 1мают верхние нп.пожения относитель
10
15
2145071
но последней, рычаги 114, закрепленные на транспортном средстве 56, отклоняются в соответствующие пазы и освобождают контейнер 4, 5 С некоторой задержкой во времени (1-2 с) после срабатьгоания датчика 1 блок 17 формирует на своем выходе ВыХо 3 команду, по которой привод 14 включается таким образом, что платформа 6 с закрепленным на ней контейнером 4 начинает перемещаться вниз. В процессе перемещения платформы 6 (и контейнера 4) вниз электрические соединители 95 и 97, закрепленные на контейнере 4, отключаются от электрических соединителей 99 и 100, закрепленных на транспортном средстве 56, а электрические соединители 96 и 98 сочленяются с электрическими соединителями 25,, размещенными в камере монтажной станции 1. При этом электрические соединители 25 проходят через пазы 46 платформы 6 и пазы 104 кон- тейнера 4.
Перемещение платформы 6 вниз продолжается до момента срабатывания .. . датчика 21 нижнего положения платформы 6. Сигнал с датчика, 21 поступает на вход Вх. 5 блока 17, который формирует на своем выходе Вых.З. команду, по которой привод 14 останавливается, С некоторой задержкой по времени (1-2 с) после срабатывания датчика 21 блок 17 формирует
20
25
30
35
40
45
50
55
на своем вьпходе Вых. 2 команду, по которой кратковременно включается излучающий элемент 58, сигнал от которого принимается чувствительным элементом 65 и поступает на вход Вх„ 2 блока 55, Указанный сигнал является сигналом разрешения дальнейшего движения транспортного средства 56, Одновременно с формированием разрешающего движения сигнала блок 17 формирует на своих выходах Вых.6 - Вых. 8 команды, в результате вьшол- нения которых в блоке 16 осуществляются следующие коммутации: устройство 51 и исполнительные и контрольные устройства и элементы (привод, датчики, чувствительные и излучающие элементы) монтажной станции 1 отключаются от блока 17i выход Вых. 3 подключается к входу Вх. выход Вых. 4 подключается к входу ВХо 6 выход Вых. 9 подключается к входу Вх, 2- выход Вых. 16 подключается к входу Вх„ 7; выход Вых. 17 подключа15
ется к входу Вх. 8; выход Вых. 18 подключается к входу Вх. 9/ выход Вых. 19 подключается к входу Вх.15; выход Вых. 11 подключается к входу Вх. 16 выход Вых. 12 подключается к входу Вх. 17, зарядные цепи (концы 27 и 28) монтажной станции 1 подключаются соответственно к цепям + и - зарядного устройства 29.
Таким образом, к блоку 17 подключаются устройство 52 и исполнительные и контрольные устройства и элементы монтажной станции 2,
Непосредственно после выполнения указанных коммутаций блок 17 формирует на своем выходе Вых. 1 команду, по которой включается излучаю- ций элемент 85.
Приняв сигналы разрешения дальнешего движения, блок 55 формирует на своем выходе Вых. 2 команду, в результате выполнения которой привод 124 включается таким образом, что транспортное средство 56 начинает перемещаться в направлении от монтажной станции 1 к монтажной станции 2 (указано стрелкой VI). При совмещении осей чувствительности элемента 64 и излучения элемента 85 на вход Вх. 1 блока 55 поступает сигнал, по которому блок 55 формирует на своем выходе Вых. 2 команду, в результате вьтолнения. которой привод 124 останавливается. Передний (пустой) отсек для контейнеров транспортного средства 56 размещается над камерой монтажной станции 2.
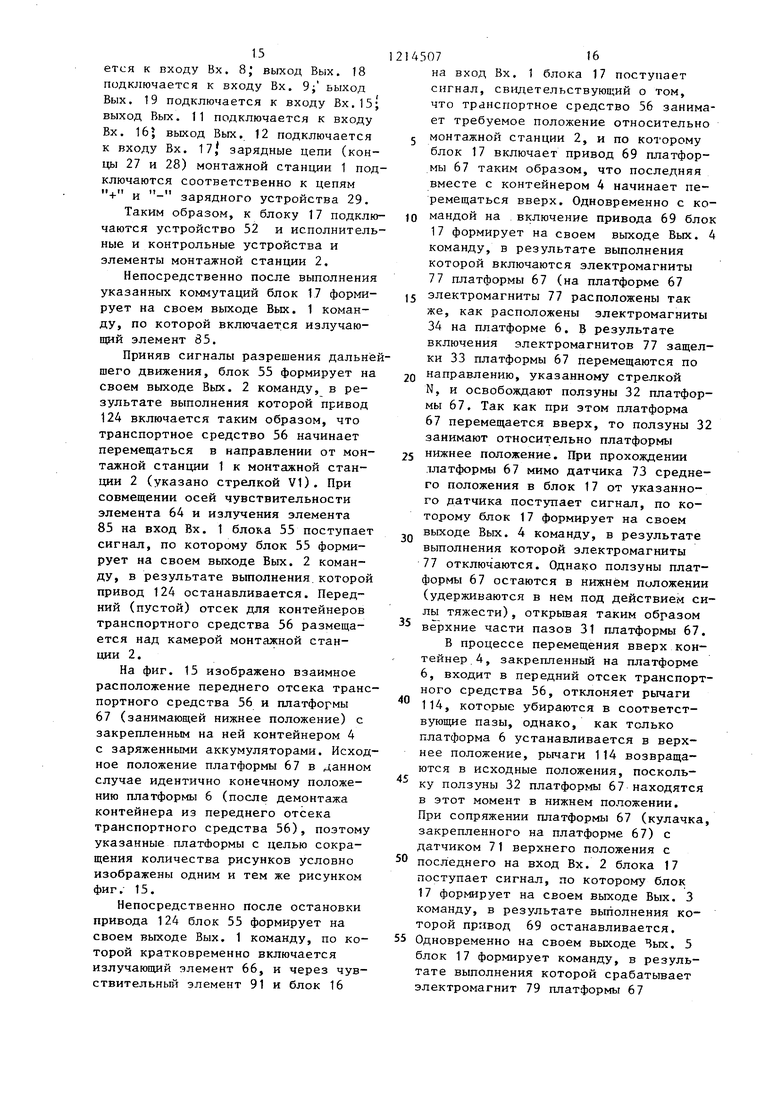
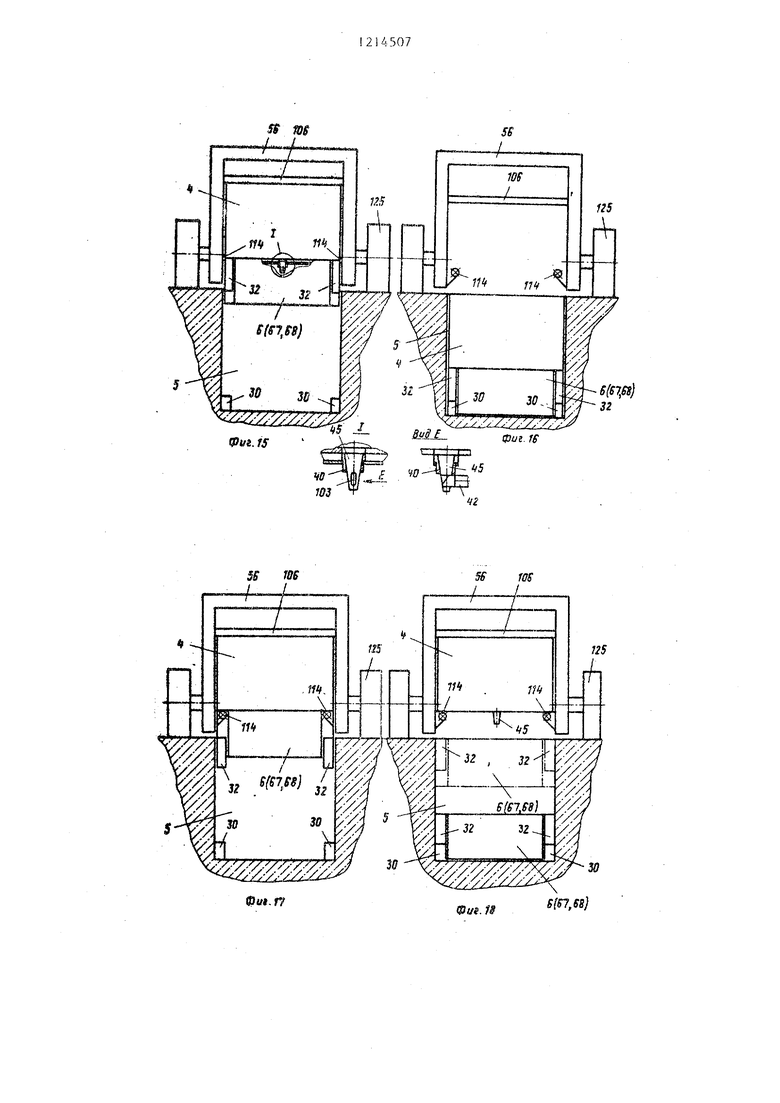
На фиг. 15 изображено взаимное расположение переднего отсека транспортного средства 56 и платформы 67 (занимающей нижнее положение) с закрепленным на ней контейнером 4 с заряженными аккумуляторами. Исходное положение платформы 67 в данном случае идентично конечному положению платформы 6 (после демонтажа контейнера из переднего отсека транспортного средства 56), поэтому указанные платАормы с целью сокращения количества рисунков условно изображены одним и тем же рисунком фиг. 15.
Непосредственно после остановки привода 124 блок 55 формирует на своем выходе Вых. 1 команду, по которой кратковременно включается излучающий элемент 66, и через чувствительный элемент 91 и блок 16
14507 6
на вход Вх. 1 блока 17 поступает сигнал, св1адетельствующий о том, что транспортное средство 56 занимает требуемое положение относительно 5 монтажной станции 2, и по которому блок 17 включает привод 69 платформы 67 таким образом, что последняя вместе с контейнером 4 начинает перемещаться вверх. Одновременно с коJO мандой на включение привода 69 блок 17 формирует на своем выходе Вых. 4 команду, в результате выполнения которой включаются электромагниты 77 платформы 67 (на платформе 67
15 электромагниты 77 расположены так же, как расположены электромагниты 34 на платформе 6. В результате включения электромагнитов 77 защелки 33 платформы 67 перемещаются по
2Q направлению, указанному стрелкой
N, и освобождают ползуны 32 платформы 67. Так как при этом платформа 67 перемещается вверх, то ползуны 32 занимают относительно платформы
25 нижнее положение. При прохождении ллатформы 67 мимо датчика 73 среднего положения в блок 17 от указанного датчика поступает сигнал, по которому блок 17 формирует на своем
, выходе Вых. 4 команду, в результате выполнения которой электромагниты 77 отключаются. Однако ползуны платформы 67 остаются в нижнем положении (удерживаются в нем под действием силы тяжести), открьшая таким образом
верхние части пазов 31 платформы 67. В процессе перемещения вверх контейнер 4, закрепленный на платформе 6, входит в передний отсек транспортного средства 56, отклоняет рычаги 114, которые убираются в соответствующие пазы, однако, как только платформа 6 устанавливается в верхнее положение, рычаги 114 возвращаются в исходные положения, посколь-
ку ползуны 32 платформы 67 находятся в этот момент в нижнем положении. При сопряжении платформы 67 (кулачка, закрепленного на платформе 67) с датчиком 71 верхнего положения с
50 последнего на вход Вх. 2 блока 17 поступает сигнал, по которому блок 17 формирует на своем выходе Вых. 3 команду, в результате выполнения которой привод 69 останавливается.
55 Одновременно на своем выходе Вых. 5 блок 17 форм11рует команду, в результате выполнения которой срабатывает электромагнит 79 платформы 67
40
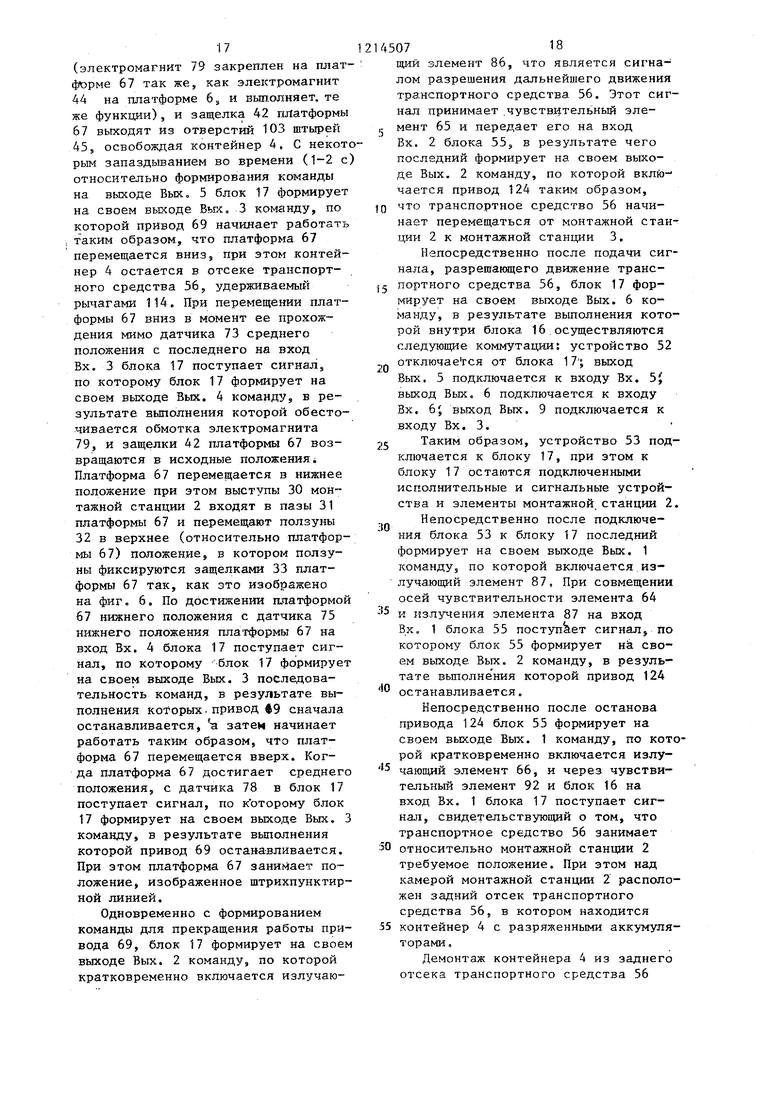
17
(электромагнит 79 закреплен на плат форме 67 так же, как электромагнит 44 на платформе 6 и выполняет, те же функции), и защелка 42 платформы 67 выходят из отверстий ЮЗ штырей 455 освобождая контейнер 4. С некотрым запаздыванием во времени (1-2 с относительно формирования команды на выходе Вых, 5 блок 17 формирует на своем выходе Вых, 3 команду, по которой привод 69 начинает работать таким образом, что платформа 67 перемещается вниз, при этом контейнер 4 остается в отсеке транспортного средства 56, удерживаемый рычагами 114. При перемещении платформы 67 вниз в момент ее прохождения мимо датчика 73 среднего положения с последнего на вход Вх. 3 блока 17 поступает сигнал, по которому блок 17 формирует на своем выходе Вых. 4 команду, в результате выполнения которой обесточивается обмотка электромагнита 79, и защелки 42 платформы 67 возвращаются в исходные положения; Платформа 67 перемещается в нижнее положение при этом выступы 30 монтажной станции 2 входят в пазы 31 платформы 67 и перемещают ползуны 32 в верхнее (относительно платформы 67) положение, в котором ползуны фиксируются защелками 33 платформы 67 так, как зто изображено на фиг, 6. По достижении платформой 67 нижнего положения с датчика 75 нижнего положения платформы 67 на вход Вх. 4 блока 17 поступает сигнал, по которому блок 17 формирует на своем выходе Вых. 3 последовательность команд, в результате выполнения которых.привод 49 сначала останавливается, в начинает работать таким образом, что платформа 67 перемещается вверх. Когда платформа 67 достигает сре;днего положения, с датчика 78 в блок 17 поступает сигнал, по которому блок 17 формирует на своем выходе Вых. 3 команду, в результате выпапнения которой привод 69 останавливается. При этом платформа 67 занимает положение, изображенное штрихпунктир- ной линией.
Одновременно с формированием команды для прекращения работы привода 69, блок 17 формирует на своем выходе Вых. 2 команду, по которой кратковременно включается излучаю1450718
щий элемент 86, что является сигналом разрешения дальнейшего движения транспортного средства 56. Этот сигнал принимает .чувств1 тельный эле,. мент 65 и передает его на вход Вх. 2 блока 555 в результате чего последний формирует на своем выходе Вых. 2 команду, по которой включается привод 124 таким образом,
IQ что транспортное средство 56 начинает перемещаться от монтажной станции 2 к монтажной станции 3.
Непосредственно после подачи сигнала, разрешакйцего движение трансjg портного средства 56, блок 17 формирует на своем выходе Вых. 6 команду, в результате выполнения которой внутри блока 16 осзтцествляются следующие коммутации: устройство 52
.,„ отклгачае гся от блока 17 ; выход Вых. 5 подключается к входу Вх. 5J выход Вых. 6 подключается к входу Вх. 6; выход Вых. 9 подключается к входу Вх. 3.
Таким образом, устройство 53 подключается к блоку 17, при этом к блоку 17 остаются подключенными исполнительные и сигнальные устройства и элементы монтажной станции 2.
Непосредственно после подключения блока 53 к блоку 17 последний формирует на своем выходе Вых. 1 команду, по которой включается.излучающий элемент 87, При совмещении осей чувствительности элемента 64
- 5 к излучения элемента 87 на вход Вх. 1 блока 55 поступает сигнал, по которому блок 55 формирует HJI своем выходе Вых. 2 команду, в результате выполне ния которой привод 124
25
;ш
ш
останавливается.
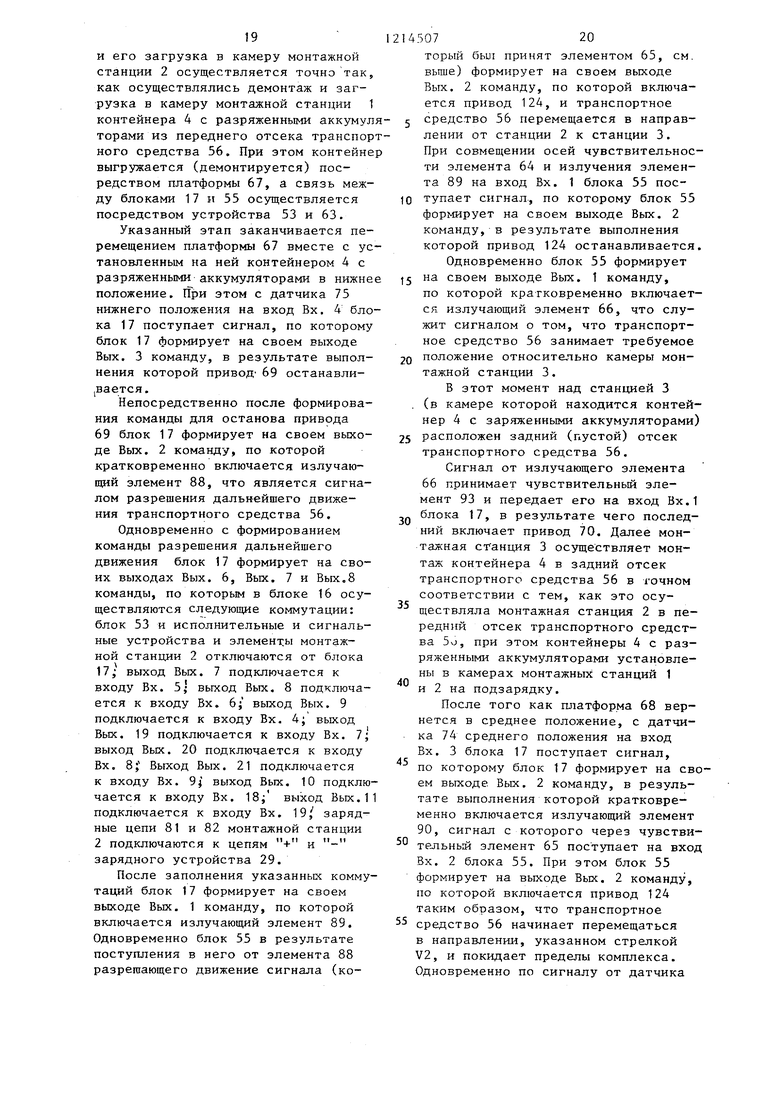
Непосредственно после останова привода 124 блок 55 формирует на своем выходе Вых. 1 команду, по которой кратковременно включается излу 5 чающий элемент 66, и через чувствительный элемент 92 и блок 16 на вход Вх. 1 блока 17 поступает сигнал, свидетельствующий о том, что транспортное средство 56 занимает
50 относительно монтажной станции 2 требуемое положение. При этом над камерой монтажной станции 2 расположен задний отсек транспортного средства 56, в котором находится
55 контейнер 4 с разряженными аккумуляторами.
Демонтаж контейнера 4 из заднего отсека транспортного средства 56
19
и его загрузка в камеру монтажной станции 2 осуществляется точно так, как осуществлялись демонтаж и загрузка в камеру монтажной станции 1 контейнера 4 с разряженными аккумулторами из переднего отсека транспорного средства 56. При этом контейне выгружается (демонтируется) посредством платформы 67, а связь между блоками 17 и 55 осуществляется посредством устройства 53 и 63.
Указанный этап заканчивается перемещением платформы 67 вместе с установленным на ней контейнером 4 с разряженными аккумуляторами в нижне положение. При этом с датчика 75 нижнего положения на вход Вх. 4 блока 17 поступает сигнал, по которому блок 17 формирует на своем выходе Вых. 3 команду, в результате выполнения которой привод 69 останавли- (Вается.
Непосредственно после формирования команды для останова привода 69 блок 17 формирует на своем выходе Вых. 2 команду, по которой кратковременно включается излучающий элемент 88, что является сигналом разрешения дальнейшего движения транспортного средства 56.
Одновременно с формированием команды разрешения дальнейшего движения блок 17 формирует на своих выходах Вых. 6, Вых. 7 и Вых.8 команды, по которым в блоке 16 осуществляются следующие коммутации: блок 53 и исполнительные и сигнальные устройства и элементы монтажной станции 2 отключаются от блока 17; выход Вых. 7 подключается к входу Вх. 5 выход Вых. 8 подключается к входу Вх. 6; выход Вых. 9 подключается к входу Вх. 4; выход Вых. 19 подключается к входу Вх. 7; выход Вых. 20 подключается к входу Вх. 8; Выход Вых. 21 подключается к входу Вх. выход Вых. 10 подключается к входу Вх. выход Вых. 1 подключается к входу Вх. 19, зарядные цепи 81 и 82 монтажной станции 2 подключаются к цепям + и - зарядного устройства 29.
После заполнения указанных коммутаций блок 17 формирует на своем выходе Вых. 1 команду, по которой включается излучающий элемент 89. Одновременно блок 55 в результате поступления в него от элемента 88 разрешающего движение сигнала (ко1450720
торый бьи принят элементом 65, см. выше) формирует на своем выходе Вых. 2 команду, по которой включается привод 124, и транспортное 5 средство 56 перемещается в направлении от станции 2 к станции 3. При совмещении осей чувствительности элемента 64 и излучения элемента 89 на вход Вх. 1 блока 55 пос- 10 тупает сигнал, по которому блок 55 формирует на своем выходе Вых. 2 команду, в результате выполнения которой привод 124 останавливается.
Одновременно блок 55 формирует 15 на своем выходе Вых. 1 команду,
по которой кратковременно включается излучающий элемент 66, что служит сигналом о том, что транспортное средство 56 занимает требуемое 20 положение относительно камеры монтажной станции 3.
В этот момент над станцией 3 . (в камере которой находится контейнер 4 с заряженными аккумуляторами) 25 расположен задний (пустой) отсек транспортного средства 56.
Сигнал от излучающего элемента 66 принимает чувствительный элемент 93 и передает его на вход Вх.1 Q блока 17, в результате чего последний включает привод 70. Далее монтажная станция 3 осуществляет монтаж контейнера 4 в задний отсек транспортного средства 56 в точном соответствии с тем, как это осуществляла монтажная станция 2 в передний отсек транспортного средства 5о, при этом контейнеры 4 с разряженными аккумуляторами установлены в камерах монтажных станций 1 и 2 на подзарядку.
После того как платформа 68 вернется в среднее положение, с датчика 74 среднего положения на вход Вх. 3 блока 17 поступает сигнал, по которому блок 17 формирует на своем выходе Вых. 2 команду, в результате выполнения которой кратковременно включается излучающий элемент 90, сигнал с которого через чувствиSn-f т-
- тельный элемент 65 поступает на вход Вх. 2 блока 55. При этом блок 55 формирует на выходе Вых. 2 команду, по которой включается привод 124 таким образом, что транспортное
55 средство 56 начинает перемещаться в направлении, указанном стрелкой V2, и покидает пределы комплекса. Одновременно по сигналу от датчика
35
40
45
21
74 блок 17 формирует на своем выходе Вых. 8 команду, которая передается в центральную ЭВМ и свидетельствует о том, что обслуживание очередного транспортного средства закочено.
Далее блок 17 переходит в режим обслуживания подзаряжаемых ляторов, размещенных в камерах станций 1 и 2. В простейшем случае это обслуживание может- заключаться в том, что блок 17 (снабженный таймером) через определенное время отключает зарядные цепи 27-28 и 81-82 от зарядного устройства 29. В более сложном варианте блок 17 может управлять зарядныгй режимами обслу- живаемьпс аккумуляторов, для чего в составе каждой станции должно быть включено устройство, обеспечивающее измерение величины зарядного тока, подключенноеI к блоку 17 (не пока- зано).
Вторая программа работы предлагамого комплекса отличается тем, что исходном состоянии контейнеры 4 с заряженными аккумуляторами размещены в камерах монтажных станций 1 и 2. Таким образом, по второй программе комплекс начинает функционировать пЬсле окончания обслуживания аккумуляторов, загруженных в камеры станции 1 и 2 при работе по первой программе.
Работа по второй программе осуществляется следующим образом.
После опроса датчиков 21 и 76 блоком 17 центральная ЭВМ вводит в блок 55 транспортного средства 56 вторую программу работы в составе рассматриваемого комплекса. Одновременно в блок 17 от центральной ЭВМ поступает команда, обеспечивающая работу всего компле кса по второй программе. При этом блок 17 формирует на своих выходах Вых. 6 и Вых. 7 команды, обеспечивающие подключение к блоку 17 уст1450722
ройства 54 связи и исполнительных и сигнальных устройств и элементов монтажной станции 3, а затем включают излучающий элемент 89. Транс- 5 портное средство 56 перемещается к монтажным станциям комплекса так же, как и при работе по первой прог-- рамме, в направлении, указанном стрелкой VI. Однако транспортное
0 средство 56 останавливается тогда, когда совмещаются оси чувствительности и излучения элементов 64 и 89, Таким образом, исходное положение транспортного средства 56 отно15 сительно станций комплекса таково, что задний отсек транспортного средства 56 с контейнером 4, в котором находятся разряженные аккумуляторы, расположен над пустой камерой мон20 тажной станции 3.
Работа комплекса и транспортного средства 56 по второй программе происходит аналогично изложенному, только транспортное средство 56 в
25 процессе замены контейнеров с
аккумуляторами перемещается в направ- ошнии, обозначенном на фиг. 1 и 3 стрелками V, т. е. от станции 3 к станции 1.
30 Таким образом, каждый последующий гулкп работы станции комплекса осуществляется в последовательности, обратной последовательности преды- дзтцего цикла, при этом в камеру
г станции 2 (центральную) каждый
цикл загружается контейнер с аккумуляторами, а камеры 1 и 3 (крайние) загружаются поочередно через цикл,
Q Так же обычно время, необходимое для заряда аккумуляторов, больше, чем время разряда аккумуляторов рабочим током, то цех, где функционирует транспортное средство 56,
,„ может быть оснащен нескрлькими (например тремя) предлагаемыми комплексами, каждый из которых вводится в действие по командам центральной ЭВМ поочередно.
47
S{67,
6Z
32
30 г7(81,ф
28182,8),-
фие,2.
Вы.З
Вш.
Я/.J
Вх.5
BblXJS
16
19 20 21
DO П
фи,.3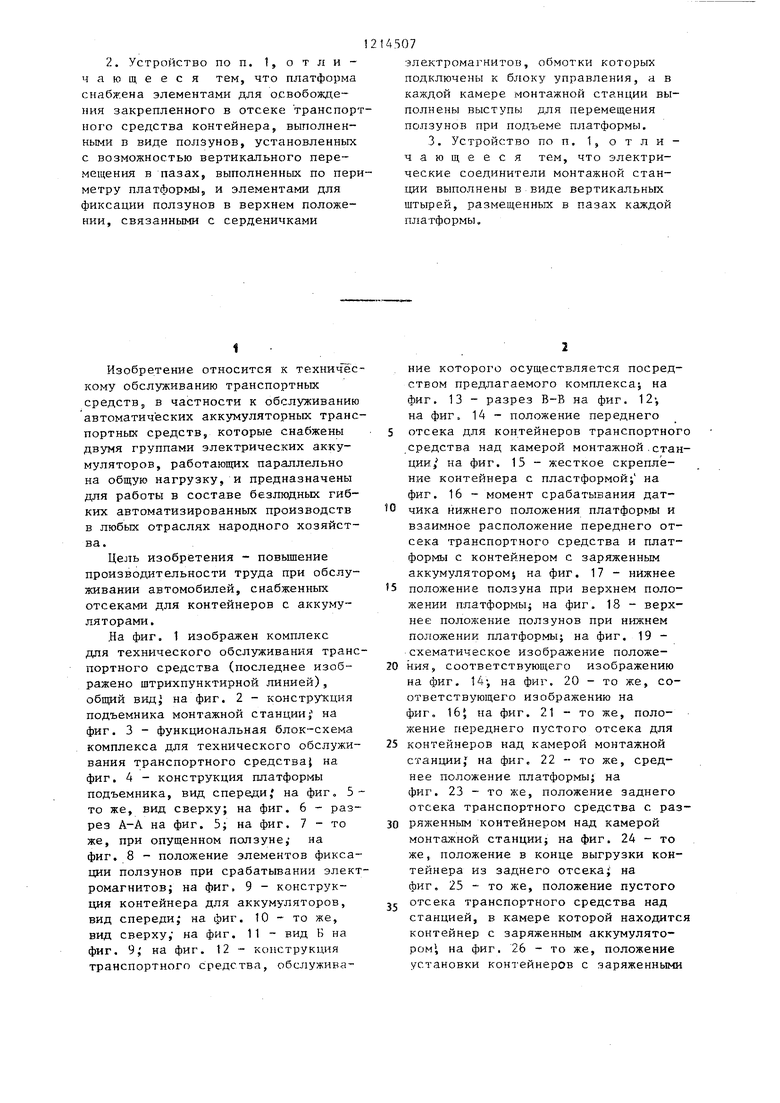


| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для перегрузки грузов | 1986 |
|
SU1437322A1 |
| Роботизированный комплекс для создания строительных элементов на космическом объекте | 2017 |
|
RU2670836C9 |
| Стенд для испытания транспортных средств | 1988 |
|
SU1559257A1 |
| Устройство для программного управления объектами | 1990 |
|
SU1718185A1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| Комплекс спасения экипажа корабля | 2019 |
|
RU2731933C1 |
| МНОГОЦЕЛЕВАЯ УПРАВЛЯЕМАЯ РАКЕТА В ПУСКОВОМ КОНТЕЙНЕРЕ | 2004 |
|
RU2277693C1 |
| Устройство для автоматической укладки мешков на поддоны | 1989 |
|
SU1749901A1 |
| Способ подготовки твердотопливной ракеты космического назначения для запуска космического аппарата и наземный стартовый подвижный ракетно-космический комплекс для его осуществления, способ сборки головного блока и комплект транспортно-технологического оборудования для его осуществления | 2023 |
|
RU2813395C1 |


A A floSeffHi/mo.
6(7 is)
32
u.S
3ff
-i
фиг.7
..j0
9
фие,8
W4 95
ifJui. JO
Bud б
45 ЮЗ
(pus. Л
00
«
ь
JNJ tS,
115
116
иг.ГЗ
фиг.11
0Ui. 15
S J,
Bieijss)
32
.ZZZZZZZ фиг. IB
30
Фи. Г7
Фие. И
S(S7,S8)
If 56
Boa
z ж ж
Сриг.Гд
/ /
(риг. 20 VI
58
KJXl
(Рие. 21 V/
Фиъ. 22
1214507
5S
и;
&
fpus. 23
фил, 2
u.25
V2
X
}/1 h 5S Ч / I I
фи.2В
ВНИИ1Ш Заказ 838/26 Тираж 648 Подписное
Филиал ПШТ Патент, г.Ужгород, ул.Проектная, 4
| Устройство для технического обслуживания автомобилей | 1975 |
|
SU549414A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
