1
Изобретение относится к вспомогательному оборудованию кузнечно- прессового производства, а именно к конструкциям манипуляторов.
Цель изобретения - расширение технологических возможностей ковоч- нОго манипулятора путем обеспечения возможности раздельного осуществления осевой подачи и поворота заготовки.
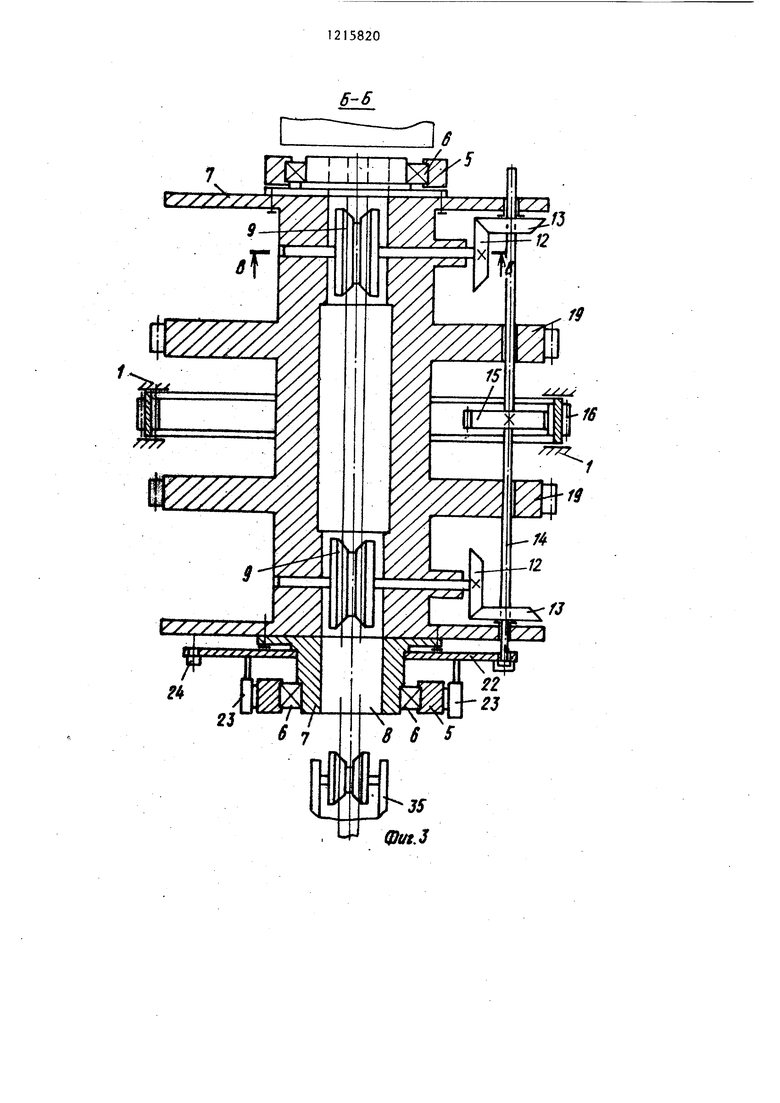
На фиг. 1 изображен ковочный манипулятор, общий вид; на фиг.2 - вид А на фиг.1; на фиг.3 - сечение Б-Б на фиг.2; на фиг.А - сечение В-В на фиг.З; на фиг.5 - кинематическая схема механизма вращения корпусов; на фиг.6 - кинематическая схема механизма вращения колес с наружным и внутренним зубчатым профилем.
Ковочный манипулятор содержит раму 1, установленные на ней с помощью винтовых пар 2 подвижные пли- ,ты 3, на которых на упругих злемен- тах 4 установлены основания 5. На последних в опорах 6 вращения установлены полые корпуса 7, в полостях 8 которых установлены с возможностью вращения профильные ролики 9 и ответные или подпружиненные пружинами 10 профильные ролики 11. Профильные ролики 9 кинематически связаны через конические шестерни 12 и установленные с возможностью осевого перемещения конические ше.стерии 13 с валами 14, размещенными в корпусах 7. На валах 14 установлены шестерни 15, соединенные внутренним зацеплением с колесами 16, находящиеся в наружном зацеплении с шестернями 17 и 18. На корпусах 7 выполнены зубчатые диски 19, входящие в зацепление с шестернями 20 и 21. Шестерни 17, 18, 20 и 21 установлены на основаниях 5. На одной из цапф корпусов 7 установлены подвижные диски 22, соединенные с приводами 23 их перемещения. На дисках 22 выполнены пазы 24, в которых размещены концы валов 14.
Шестерни 17 соединены валом 25, на котором установлен блок 26 обгонных муфт-шестерен (с прямым и обратным вращением вала 25), который через рейку 27 кинематически связан с шаговым приводом 28. Блок обгонных муфт-шестерен кинематически соединен с приводом 29 от продольного
15820
перемещения. Шестерни 20 соединены валом 30, на котором установлен блок 31 обгонных муфт-шестерен (с прямым и обратным вращением вала 30)
5 который через рейку 32 кинематически соединен с шаговым приводом 33. Блок обгонных муфт-шестерен кинематически соединен с приводом 34 его продольного перемещения. Перед
передним корпусом 7 установлен приводной подающий рольганг 35, а за задним корпусом 7 установлен приемный приводной рольганг 36, перемещающий длинномерную поковку 37.
5 Ковочный манипулятор работает следующим образом.
Поковку 37 по рольгангу 35 подают в полость 8 переднего корпуса 7 и передний конец поковки 37, отжимая
ролики 11, поступает на нижний боек молота (показан тонкими линиями). После этого включается шаговый привод 33 и через рейку 32 и блок 31 обгонных муфт-шестерен приводит во
вращение вал 30, который через шестерни 20 и зубчатые диски 19 вращает корпуса 7 с зажатой в их профильных роликах 9 и 11 поковкой 37 и, одновременно обкатьшая шестерни 15
30 по колесу 16, через валы 14 и конические шестерни 13 и 12 вращает ролики 9, заставляя поковку 37 перемещаться в продольном направлении, сообщая тем самым;поковке 37 продольное
35 и угловое перемещение одновременно.
При необходимости сообщить поковке 37 только угловое перемещение дополнительно включают приводы 23 и с помощью дисков 22 через валы 14 выво40 дят шестерни 15 из зацепления с колесами 16.
При необходимости сообщить поковке 37 только продольное перемещение останавливают привод 33 и включают
45 привод 28, приводящий Через рейку 27, блок 26 обгонных муфт-шестерен, вал 25 и шестерни 17 во вращение колеса 16, которые через шестерни 15, валы 14 и конические шестерни 13 и 12
50 вращают ролики 9 корпус в это время неподвижен).
При необходимости сообщить поковке 37 обратное продольное или обратное угловое перемещение включают со55 ответственно приводы 29 и 34, вводя в зацепление блоки 26 и 31 обгонных муфт-шестерен с обратным направлением вращения.
/ I f /
-7- 11 й. г
5 ю j г7 1 Л i гвгз JC J3. го т з s
(JJat.l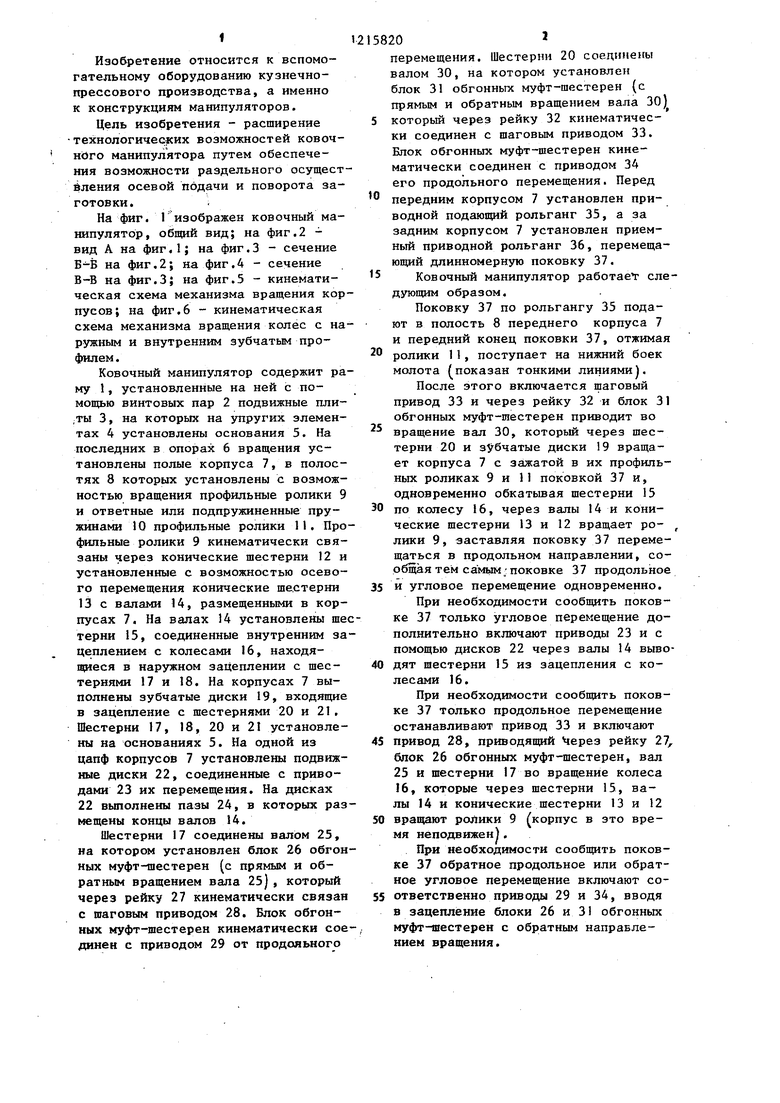

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для перемещения заготовок | 1983 |
|
SU1138209A1 |
| Устройство для передачи штучных грузов с одного конвейера на дрYгой | 1984 |
|
SU1244063A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Устройство для навивки пружин | 1980 |
|
SU990387A1 |
| Захват кузнечного манипулятора | 1980 |
|
SU912391A1 |
| Прокатный стан | 1988 |
|
SU1583196A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Автомат Петрова для сборки и сварки кожухов вентиляторов | 1985 |
|
SU1368146A1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
tt
fj
фигЛ
( И
фиг. 5фиг.б
Составитель В.Шебалкин Редактор М.Бланар Техред:О.Ващишина Корректор В.Бутяга
Заказ 932/10 Тираж 656 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул.Проектная, 4
| Ковочный манипулятор | 1976 |
|
SU595050A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
