Изобретение относится к области автоматизации складских и транспортных работ и может быть использовано для управления, например, тяжелыми кранами-штабелерами., обслуживающими склады в составе гибких производственных систем (ГПС).
Цель изобретения - увеличение производительности.
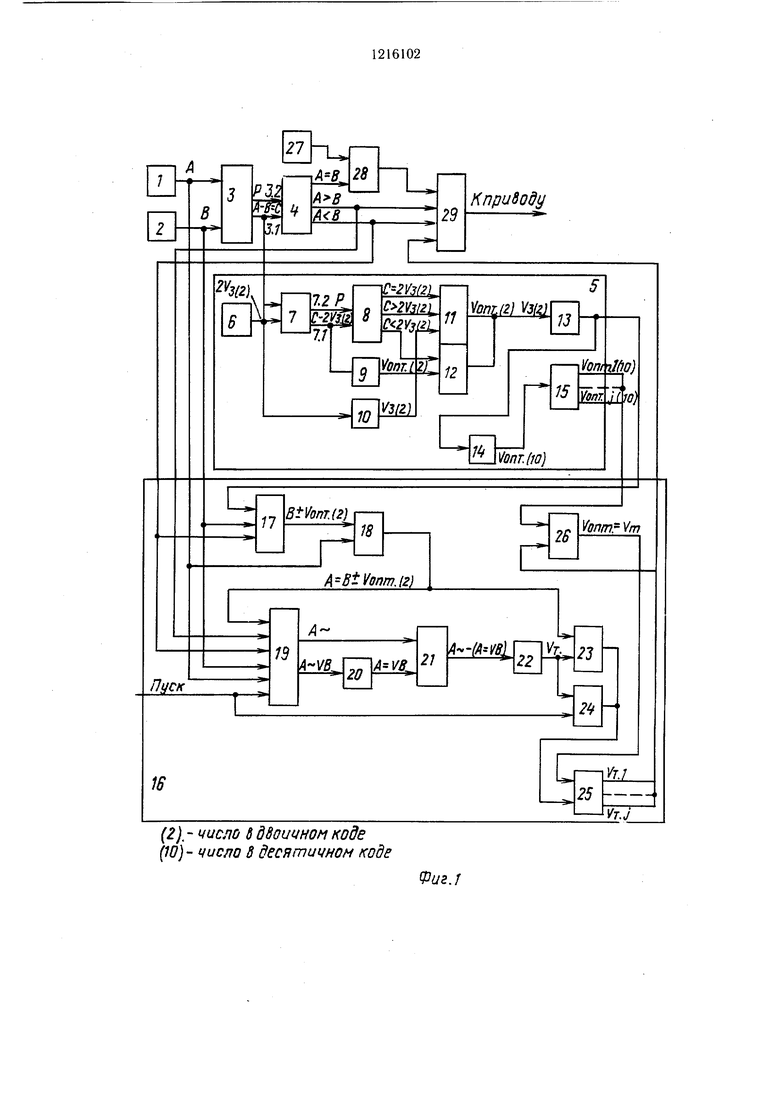
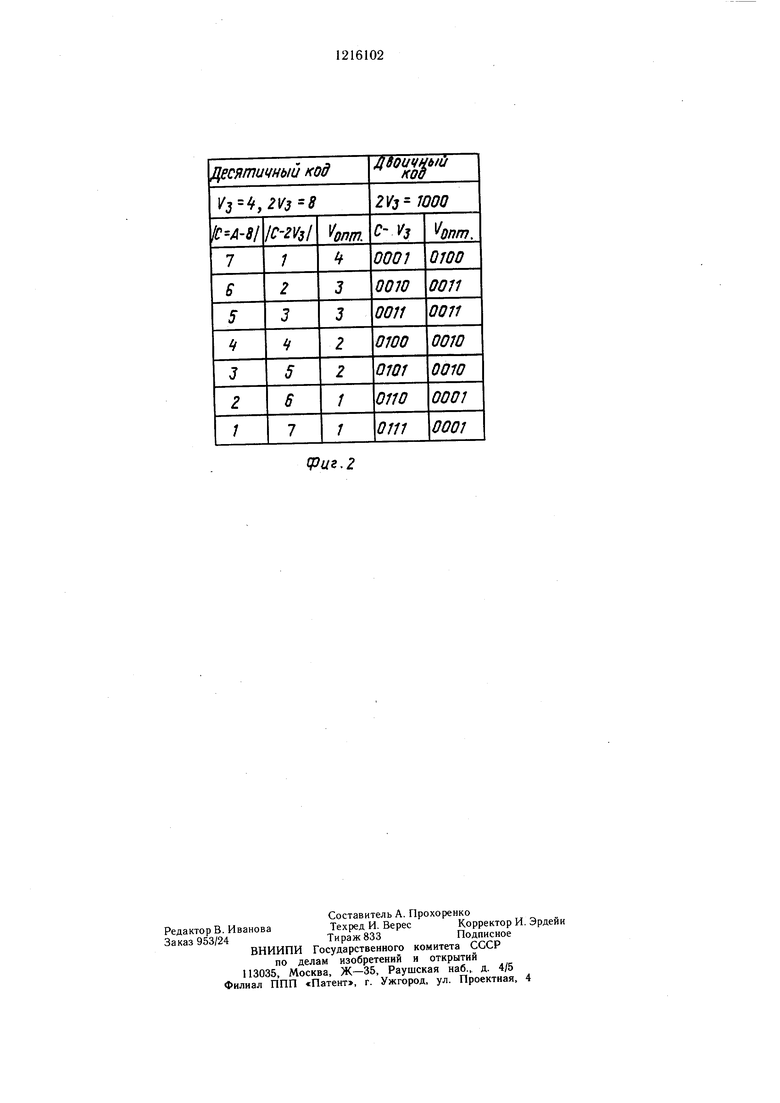
На фиг, 1 представлена функциональная схема устройства; ;на фиг. 2 - таблица кодов оптимальной Хкорости.
Устройство для автоматического управления транспортным механизмом содержит блок 1 кода положения, блок 2 кода адреса, сумматор 3 с выходами 3.1 и 3.2 переноса, формирующий разность кодов положения и адреса, блок 4 сравнения, осуществляющий сравнение кодов положения и адреса по модулю, а следовательно, определяет направление движения и останов, блок 5 задания оптимальной скорости, осуществляющий выбор оптимальной скорости на заданном участке в зависимости от максимальной скорости механизма и длины заданного участка, представленной дискретно в виде позиционного двоичного кода.
Блок задания оптимальной скорости состоит из двоичного задатчика 6 максимальной скорости, который устанавливает удвоенную максимальную скорость механизма в дво ичном коде; сумматор 7 с выходами 7.1 и 7.2 переноса, формирующего разность максимальной удвоенной скорости транспортного механизма и длины заданного участка, представленной в виде разности кодов положения и адреса: узла 8 сравнения, осуществляющего сравнение удвоенной максимальной скорости механизма и длины заданного участка по модулю; дещифратора 9, расщифро- вывающего удвоенную максимальную скорость с двоичного задатчика максимальной скорости в ее действительное значение в двоичном коде; дещифратора 10, задающего оптимальную скорость движения в зависимости от величины разности между удвоенной максимальной скоростью механизма и длиной заданного участка; ключа 11, коммутирующего максимальную скорость при условии, что длина заданного участка больще или равна удвоенной максимальной скорости механизма; ключа 12, коммутирующего выбранную оптимальную скорость при условии, что длина заданного участка меньще удвоенной максимальной скорости механизма; регистра 13, записывающего в двоичном коде заданную скорость: дещифратора 14, рас- щифровывающего заданную скорость в десятичный код, и регистра 15, записывающего значение скорости в десятичном коде.
Устройство включает блок 16 разгона и торможения, формирующий сигналы текущей скорости при разгоне и торможении, который состоит из сумматора 17, формирующего координату торможения, сумматора 18, формирующего сигнал торможения.
узла 19 коммутаций, коммутирующего коды положения и адреса в зависимости от направления движения и сигналов «Пуск и «Торможение, регистра 20, записывающе- 5 го код положения при сигнале «Пуск и код адреса при сигнале «Торможение, сумматора 21, определяющего величину разности координат текущей и записанной в регистр 20, дещифратора 22, расщифровыва ю- щего величину разности с сумматора, 21
в текущую скорость; ключей 23 и 24, коммутирующих сигналы текущей скорости в зависимости от сигналов «Пуск или «Торможение, регистра 25, записывающего текущую скорость, блока 26 совпадения, который фик5 сирует оптимальную скорость на заданном участке.
Устройство также содержит датчик 27 точного останова, схему И 28, формирующую сигнал точного останова механизма на заданной позиции, блок 29 управления приво0 дом. Блоки 1 и 2 кода положения и кода адреса подключены выходами к входам сумматора 3, выход 3.1 которого соединен с входом блока 4 сравнения, подключенного выходами к входам блока 29 управления при- водом. Третий вход блока 29 соединен с выходом элемента И 28, подключеного одним из входов к датчику 27 точного останова. Четвертый вход блока 29 соединен с выходом блока 16 разгона и торможения. Вход блока 5 задания оптимальной скорости соединен
Q с выходом 3.1 сумматора 3, подключенного выходом 3.2 к дополнительному входу блока 4 сравнения. Третий выход блока 4 соединен с другим входом элемента И 28. Один из выходов и другой выход блока 5 задания оптимальной скорости подключены к соответствующим входам блока 16 разгона и торможения. Третий и четвертый входы блока 16 соединены с выходами соответственно блока 2 кода адреса и блока 1 кода положения, пятый и щестой входы с выходами блока 4 сравнения, а седьмой - с шиной «Пуск.
0 Ключи 23 и 24 блока 16 выходами соединены с одним из входов регистра 25, выход которого является выходом блока 16 и соединен с одним из входов блока 26 совпадения, другой вход которого является втор.ым входом блока 16, а выход подключен к другому входу регистра 25. Одни из входов ключей 23 и 24 соединены с выходом дешифратора 22. Другой вход ключа 23 и один из входов узла 19 коммутации соединены с выходом сумматора 18, подключенного одним
0 из входов к выходу сумматора 17, один из входов которого является первым входом блока 16. Другие входы сумматора 17 и узла 19 коммутации являются третьим входом блока 16.
Третьи входы сумматора 17 и узла 19
5 коммутаций являются пятым входом блока 16. Другой вход и четвертый сумматоры 18 и узла 19 коммутации являются четвертым входом блока 16, пятый вход узла 19 -
шестым, а шестой и другой входы ключа 24- седьмым. Один из выходов узла 19 коммутаций соединен с одним из входов сумматора 21, а другой выход - с входом регистра 20, подключенного выходом к другому входу сумматора 21, выход которого соединен с входом дешифратора 22.
Выход регистра 13 блока 5 задания оптимальной скорости является первым выходом блока 5 и подключен к входу дешифратора 14, соединенного выходом с входом регистра 15, выход которого является вторым выходом блока 5.
Выход задатчика 6 максимальной скорости подключен к входу дешифратора 10 и одному из входов сумматора 7, другой вход которого является входом блока 5, а выходы 7.1 и 7.2 соединены с узлом 8 сравнения.
Один из входов и другой ключ 11 соединены с соответствующими выходами узла 8 сравнения. Третий вход ключа 11 соединен с выходом дешифратора 10. Один из входов ключа 12 соединен с третьим выходом узла 8, а другой - с выходом дешифратора 9, подключенного входом к выходу 7.1 сумматора 7. Выходы ключей 11 и 12 соединены с входом регистра 13.
Устройство работает следующим образом.
Код положения А транспортного механизма и код заданного адреса В с блоков 1 и 2 кода подаются на входы сумматора 3. На сумматоре 3 производится формирование разности С кодов положения и адреса и уровня переноса Р, О или 1. С выходов 3.1 и 3.2 сумматора 3 код разности С и перенос Р подаются на входы блока 4 сравнения. Код разности С подается также на второй вход сумматора 7. На узле 4 сравнения по коду разности С и переносу Р формируются сигналы (Назад), (Вперед) и (Стоп). Сигналы и подаются на второй и третий входы блока управления приводом 29 и на вход блока управления разгона и торможения. Сигнал подается на второй вход схемы И 28, на первый вход которой подается сигнал с датчика 27 точной остановки. С выхода логического элемента сигнал подается на первый вход блока 29 управления приводом. В блоке 5 задания оптимальной скорости оптимальная скорость на заданном участке формируется следуюш.им образом.
На первый вход сумматора 7 с двоичного задатчика максимальной скорости поступает удвоенная максимальная скорость транспортного механизма 2Уз(2) в двоичном коде. На сумматоре 7 производится формирование разности кода С и удвоенной максимальной скорости транспортного механизма 2Уз(2), а также перенос Р. С выхода сумматора 7 разность С-2Уз(2) и перенос Р подаются на входы узла 8 сравнения. Разность С- 2УзС2) подается также на вход дешифратора 9. Выход двоичного задатчика максимальной
5
скорости 2Уз(2) подается на дешифратор 10, где расшифровывается в действительное значение максимальной скорости в двоичном коде Уз(2).
сНа дешифраторе 9 происходит расшифровка оптимальной скорости в зависимости от разности С-2Уз{2) с выходов дешифраторов 9 и 10. Оптимальная и максимальная скорости поступают соответственно на ключи 12 и 11.
О Ключами управляет узел 8 сравнения, который формирует по коду разность С- 2Уз и переносу Р сигналы (2, С 2Уз(й, (2).
Если (2), то открыты ключи 11 и на вход регистра 13 подается максимальная скорость транспортного механизма Уз(2), которая в данном случае является оптимальной. Если ), то открыты ключи 12 и на вход регистра 13 подается оптимальная скорость Уоптсг). С регистра 13 выбранная
0 оптимальная скорость Уол1(г) подается на первый вход сумматора 17 и на дешифратор 14. На дешифраторе 14 производится расшифровка скорости Уопт(2) из двоичной системы в десятичную VonT(io).
В регистр 15 записывается выбранная
5 оптимальная скорость в десятичном коде и подается на первый вход блока 26 совпадения.
На второй вход сумматора 17 подается код адреса В, на третий - сигнал направления движения. По этим сигналам сумматор формирует координату торможения В± ±VonT которая подается на первый вход сумматора 18. Знак ( + ) или (-) и соответственно операция сложения или вычитания сумматором зависит от выбора направления движения. Если (Вперед), то координата торможения В-Vom. При этом на вход Р младшего переноса сумматора 17 подается логическая единица и производится вычитание. Если А В (Назад), то координата торможения В+УОПТ.
0 При этом на вход РО сумматора 17 подается логический нуль и производится сложение.
Входы младших переносов Р остальных сумматоров подключаются к логической единице, если производится вычитание или
5 к нулю, если сложение, кроме сумматора 21, вход которого подключен к логическому нулю, а вычитание производится с помощью узла 19 коммутации.
На второй вход сумматора 18 подается
код положения А. При совпадении кода положения с координатой торможения ±Уопт(г) на выходе сумматора 18 формируется сигнал торможения, который подается на один из первых входов узла 19 и ключа 23. На седьмой вход блока 16 по5 дается сигнал «Пуск, на шестой и пятый - сигналы , , на третий и четвертый входы соответственно код адреса В и код положения А. При поступлении сигнала
0
«Пуск через узел 19. коммутации в регистр 20 записывается код положения А и подается на второй вход сумматора 21.
На первый вход сумматора 21 подается код положения А, где А - координата положения механизма, с которой начинается движение. А - текущая координата. На выходе сумматора 21 формируется разность А--А, которая подается на дешифратор 22. На дешифраторе производится расшифровка величины разности в текуш,ую скорость Vj, причем код разности 0000 соответствует 1-й скорости, 0001 -2-й, 0010 -3-й, ООП - 4-й и т. д. Расшифрованная текуш,ая скорость через ключи 24 поступает в регистр 25 скоростей. С выхода регистра скоростей теку- шая скорость V поступает на четвертый вход блока 29 управления приводом и второй вход блока 26 совпадения.
При совпадении блок совпадения своим выходом запрещает запись в регистр скоростей, разгон прекращается. Происходит движение на оптимальной скорости до получения сигнала торможения А 2В±Уопт(2).
При поступлении сигналов торможения через узел 19 коммутации в регистр 20 записывается код адреса В и на сумматоре 21 производится вычитание А-В, результат вычитания также расшифровывается дешифратором 22, но в регистр скоростей 25 записывается через ключи 23, причем посредством сдвига на ключах код 0000 соответствует 0-й скорости, 0001 - 1-й, 0010 - 2-й и т. д.
При управлении транспортным механизмом возникают четыре режима:
1-й (Назад) и разгон.
При этом текущая координата А на входе сумматора 21 уменьшающая величина по отношению к А, записанной в регистр 20.
2-й (Назад) и торможение.
При этом в регистр 20 записывается заданная координата В. которая поступает на второй вход сумматора 21 и является меньшей величиной по отношению к текущей координате А.
3-й (Вперед) и разгон.
При этом текущая координата А на входе сумматора 21, увеличивающаяся величина по отношению к А, за гисанной в регистр 20.
4-й (Вперед) и торможение.
При этом в регистр 20 записывается заданная координата В, -которая поступает на второй вход сумматора -21 и является больщей величиной по отнощению к текущей координате A-v.
Очевидно, что для проведения вычитания при 1-м и 4-м режиме, текущую координату А необходимо подать на вход сумматора 21 в прямом коде, а А и В в регистр 20 записать с инверсией; во 2-м и 3-м режиме текущую координату А необходимо подать на вход сумматора 21 с инверсией, а А и В в регистр 20 записать в прямом коде.
Указанные операции в блоке 16 производятся узлом 19 под воздействием управляющих сигналов направления движения , .
При достижении транспортным механизмом заданного адреса с четвертого входа блока управления приводом (представляющего собой например, набор оптронных тиристоров и магнитных пускателей или реле) снимается сигнал, скорости отключаются.
Происходит торможения транспортного механизма. При достижении датчика 27 механизм осуществляет точное позиционирование согласно заданного адреса.
Использование предлагаемого устройства улучщает условия эксплуатации привода, повышает точность останова, снижает расход электроэнергии.
Р3.2 3
15.7
29
КприВоду
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кодирования и регистрации графической информации | 1985 |
|
SU1332345A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для автоматического управленияшТАбЕлЕРОМ | 1978 |
|
SU819811A2 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для программного управления | 1983 |
|
SU1087960A1 |
| Многоканальный преобразователь код-угол | 1973 |
|
SU486344A1 |
| Многокоординатная система числового программного управления | 1972 |
|
SU448435A1 |
| Устройство контроля | 1985 |
|
SU1291931A1 |
| Вычислительное устройство системы автоматического управления | 1972 |
|
SU638967A1 |
2Ы
7/
8
(21
С 2Уз121
№з
11
УопиЖ.
12
Уош lido}
Ущ
Уопг.
4LW)
Шт.1ю)
11
BtVonT.{2)
Vonmr Ут
A BtVonm.iz)
А-13
Пуск
16
(2), - число 6 двоичном коде (10) - число д десятичном коде
21
A- -lA VBl
ВЩ
Уи
Фиг.
цг.2
| 0 |
|
SU159437A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Авторское свидетельство СССР № 757442, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
