Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах станков и промыш- .ленных роботов.
Цель изобретения - упрощение конструкции.
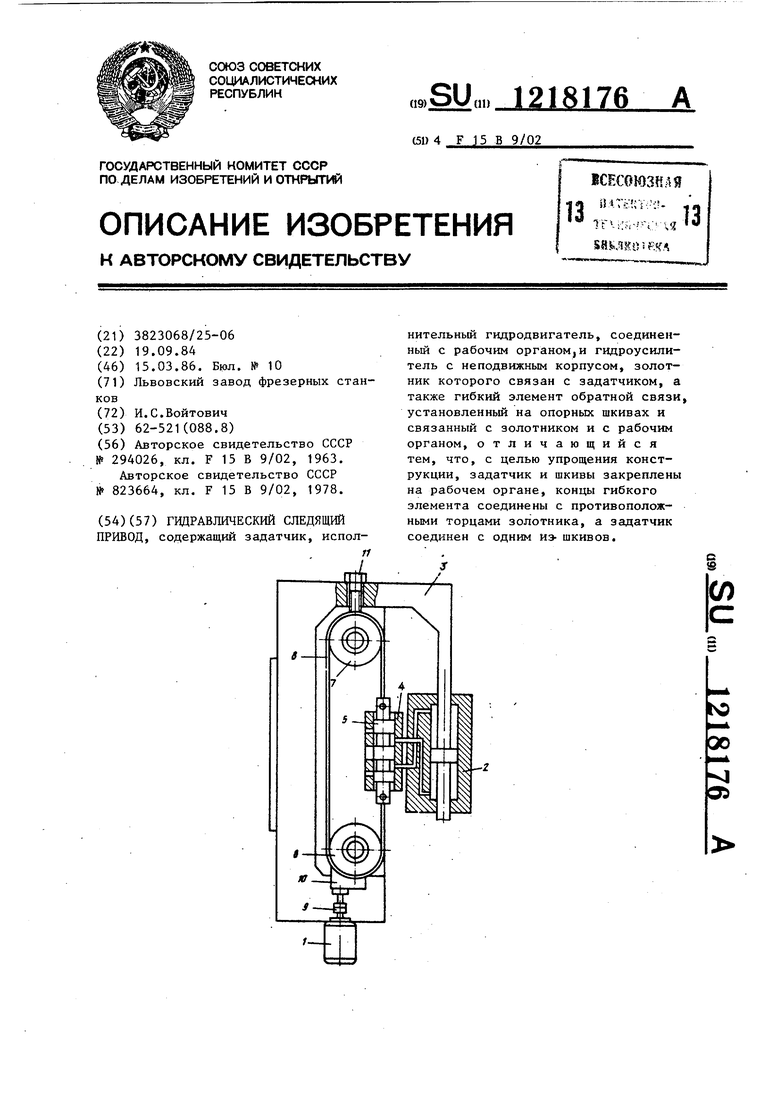
На чертеже изображена схема гидравлического следящего привода.
Привод содержит задатчик, например шаговьш двигатель 1, исполнительный гидродвигатель в виде силового гидроцилиндра 2, соединенного с рабочим органом 3, гидроусилитель (не обозначен) с неподвижным корпусом 4, золотник 5 которого гидравлически связан с гидроцилиндром 2. Двигатель 1 и опорные шкивы 6 и 7 закреплены на рабочем органе 3, гибкий элемент 8 установлен на шкивах 6 и 7 и его концы соединены с противоположными торцами золотника 5. Двигатель 1 соединен муфтой 9 и редуктором 10 со шкивом 6. Для натяжения гибкого элемента 8 служит винт 11.
Гидравлический следящий привод работает следующим образом.
Составитель С. Рождественский Редактор Л. Авраменко Техред А.ВабинецКорректор Е. Сирохман
Заказ 1119/46 Тираж 610. Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Броектная, 4
18176
Шаговый двигатель 1 через муфту 9 и редуктор 10 вращает шкив 6, который перемещает гибкий элемент 8 совместно с золотником 5. Золотник 5 5 смещается относительно корпуса 4, в результате чего формируется рабочий перепад давлений на гидроцилиндре 2, перемещающем рабочий орган 3.
Совместно с рабочим органом 3 пе- 10 ремещаются шкивы 6 и 7 и гибкий элемент 8 с золотником 5. В результате последний возвращается в исходное положение относительно корпуса 4 и отработка управляющего сигнала закан- J5 чивается.
Поскольку прямое и возвратное перемещение золотника обеспечивается одним и тем же гибким элементом из конструкции привода исключаются про- 20 межуточные элементы суммирования управляющего сигнала обратной связи. I
Использование данного привода в
гидросистемах станков и промышленных роботов позволит упростить их конст- 25 рукцию и, тем самым, повысить эффективность их использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1989 |
|
SU1696376A1 |
| Линейный шаговый привод | 1973 |
|
SU477820A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ТОНКИХ ПЕРЕМЕЩЕНИЙ РАБОЧИХ ОРГАНОВ ПРЕЦИЗИОННЫХСТАНКОВ | 1970 |
|
SU274610A1 |
| Устройство для управления положением рабочих органов | 1977 |
|
SU677911A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯМИ ПОДАЮЩИХ ОРГАНОВ СТАНКОВ РЕБРОВОГО ДЕЛЕНИЯ ПИЛОМАТЕРИАЛА | 1972 |
|
SU325175A1 |
| Ленточно-шлифовальный станок | 1977 |
|
SU704765A2 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Устройство для уравновешивания вертикально перемещаемых узлов металлорежущих станков | 1980 |
|
SU918018A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Следящий привод | 1978 |
|
SU751620A1 |
| ОЩУПЫВАЮЩЕЕ УСТРОЙСТВО ГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 0 |
|
SU294026A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Гидравлический следящий привод | 1978 |
|
SU823664A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
