Известна система управления перемещепиями нодающих органов станков ребрового деления пиломатернала, включаю,щая гидравлический следящий золотник, управляющий перемещениями базируЮЩего заготовку органа посредством жестких механических связей, и золотник управлеиня -пе рем-ещеннами приЖимиого органа.
Цель изобретения - обеснечение ди танциояного унравлеиия и юдиовременного перемещения базирующего и ;прижи1М|Ного органов статакоБ ребрового деления лиломатериала.
Для этого в систему управлания введен эле ктро-:меха.нический регулятор, обеспёчиваЮЩБЙ через м,уфту сцепле-ния зада.нный поворот якоря гидравлического следящего золотиика относительно его втулки, причем якорь механически связан с лрижимщым органом, а втулка - с базирующим органом.
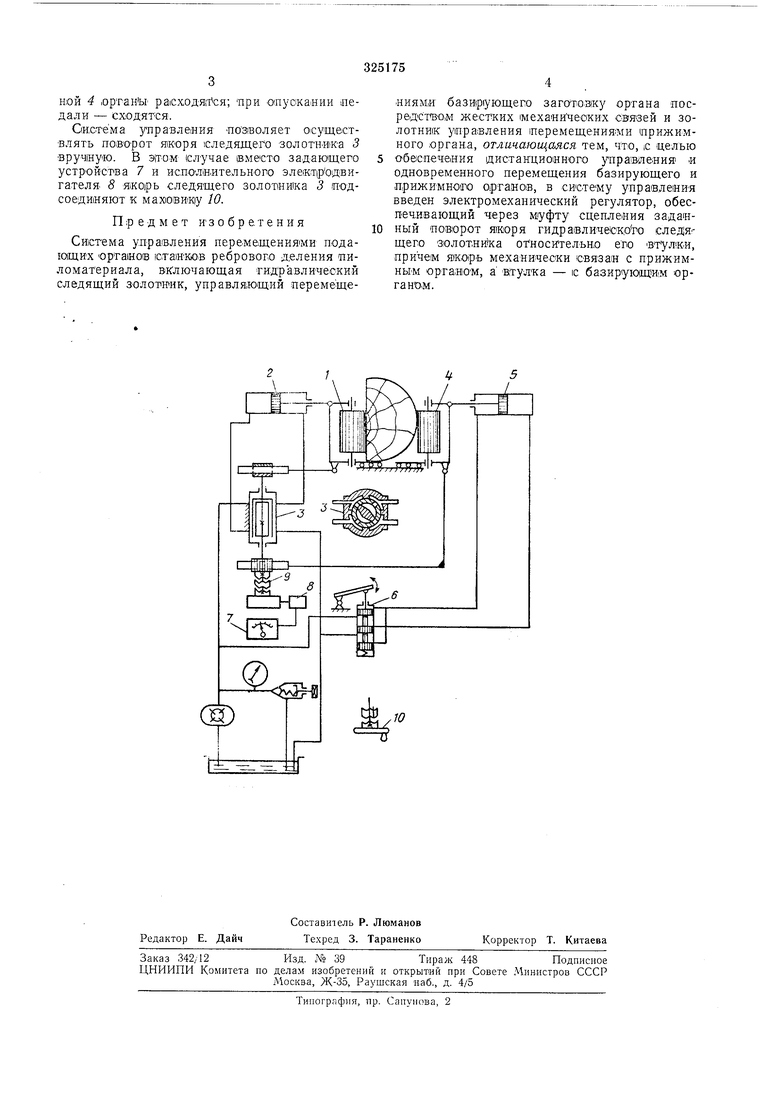
На чертеже схематически изображена система управления перемещения.ми подающих ортанов станка ребрового деления пиломатериала.
Система |унра;Вле1Ния содержит базирующий заготовку орган 1, перемещаемый по направляю,щи.м гидроцилиндром 2, управляе мым гидравлическим следящим золотником 3; прижимной орган 4, перемещаемъгй по направляющим гидроцилиндром 5, управляемым золотнико.м б; задающее устройство 7 с исполнительным электродвигателем 8 и муфту сцепления 9.
Муфту 9 вводят в зацепление с редуктором исполнительного электродвигателя 8, а задающим устройством 7 Лстанавливают величину необходимого перемещения. Сигнал поступает к исполнительному электродвигателю 8, поворачивающему жкорь золотн.ика 3
на определенный угол относительно его втулки. При этом открывается доступ рабочей жидкости к гидроцилиндру 2, который перемещает базирующий орган 1. Одновременно при помощи жесткой связи щестерня - рейка
втулка золотника 3 поворачивается до перекрытия отверстий, подводящих рабочую жидкость .к гидроцилиндру 2. Таким образом, базирующий ортан перемещается на требуемый размер относительно пилы.
Система выполнена так, что прИжилшой орган, 4 гидроцилиндром 5 все время прижимает заготовку к базирующему органу 1.
Отвод прижимного органа производится нажатием на педаль золотннка 6.
Симметричное перемещение базирующего 1 и прижимного 4 органов относителыно пилы произ водя1т введением м-уфты 9 в зацепление с жесткой связью шестерня-реЙ1ка прижимного органа и педалью золотника 6. При наной 4 lOpraHbi раюходягЛя; при оиуокаиии педали - сходятся.
Система управления ловволяет Осуществлять noiB0-рот якоря следящего золотн-шка 3 вручную. В Э1ТОМ (случае 1вместо задающего устройства 7 и ИСпОЛ1н.ительного электродвигателя- 5 я1КО|рь следящего золотника 3 подсоедиияют к махювищу 10.
Предмет и з о б р е т е н и я
Система управления пере-мещениями подающих ортанов ютанков ребрового Д;еления пиломатериала, включающая гидравлический следящий золот1№ик, управля1ющлй перемещениями бази1р1ую.щего заготоаку органа посредством жестких 1меха«ичеоких связей и золотник у1пра(вления шеремещенияэди прижимного органа, отличающаяся тем, что, с целью
обеспечения дистакциоиного упраВЛеиия и одновременного перемещения базирующего и прижимноох) органов, в систему управления введен электромеханический регулятор, обеспечивающий через муфту сцеплейия задаиный еоворот Я1юоря гидравличе ского следя щего золотника относительно его втулк-и, причем якорь механически связан с прижимНЫМ органом, а «тулка - ic базирующим органом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМе-с?;сою:^;^*^- • bATEM^a^aiiH^i^- Щ ""^ &и&лиот^и.л^^ | 1973 |
|
SU374161A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| Гидравлический следящий привод | 1982 |
|
SU1025925A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМПОДАЮЩИХ ВАЛЬЦОВ ДЕРЕВООБРАБАТЫВАЮЩЕГО СТАНКА | 1972 |
|
SU426811A1 |
| Гидравлический следящий привод | 1977 |
|
SU935650A1 |
| Система управления следящим гидроприводом | 1978 |
|
SU749637A1 |
| ДРОССЕЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ | 1971 |
|
SU301685A1 |
| Гидравлический привод главного движения протяжного станка | 1959 |
|
SU124279A1 |
