(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РАБОЧИХ ОРГАНОВ
мочным аксиальным .золотником, механизм задания размеров с рычагом и плоским копиром и механизм обратной СВЯ5И. Положение подвижной пилы задается поворотом рукоятки управления через промежуточный вал с муфтам При этом плунжер золотника смешается из нейтрального положения и открывает выходные окна. Перемещение цилиндра, жестко связанного с пильным суппортом, продолжается до тех пор,пока под воздействием механизма обратной связи плунжер золотника вновь не займет нейтральное положение и не отсечет обе полости гидроцилиндра 3.
Недостатками этого устройства являются значительные погрешности установки пильного суппорта на размер, а также значительные усилия на рукояке управления.
Цель изобретения - повышение точности установки рабочего органа и удобства обслуживания.
Это достигается тем, что механизм задания размеров соединен с механизмом обратной связи посредством винтовой пары и валика, плунжер аксиального следящего золотника выполнен с осевым отверстием, через который проходит валик, жестко соединенный с винтом винтовой пары, а гайка винтовой пары смойтирована в шарикоподшипниках неподвижно в осевом направлении и кинематически связана с механизмом задания размеров.
Кроме того, с целью осуществления дистанционного управления, механйзм заданйя размеров выполнен с датчиком электрических импульсов и управляемым электродвигателем, вал которого с установленным на нем диском кинематически связан с г.айкой винтовой пары.
Механизм обратной связи может быт выполнен в виде шкивов, огибаемых подпружиненным тросОм, конщл которого связаны с рабочим органом, а один из шкивов жестко связан с валиком.
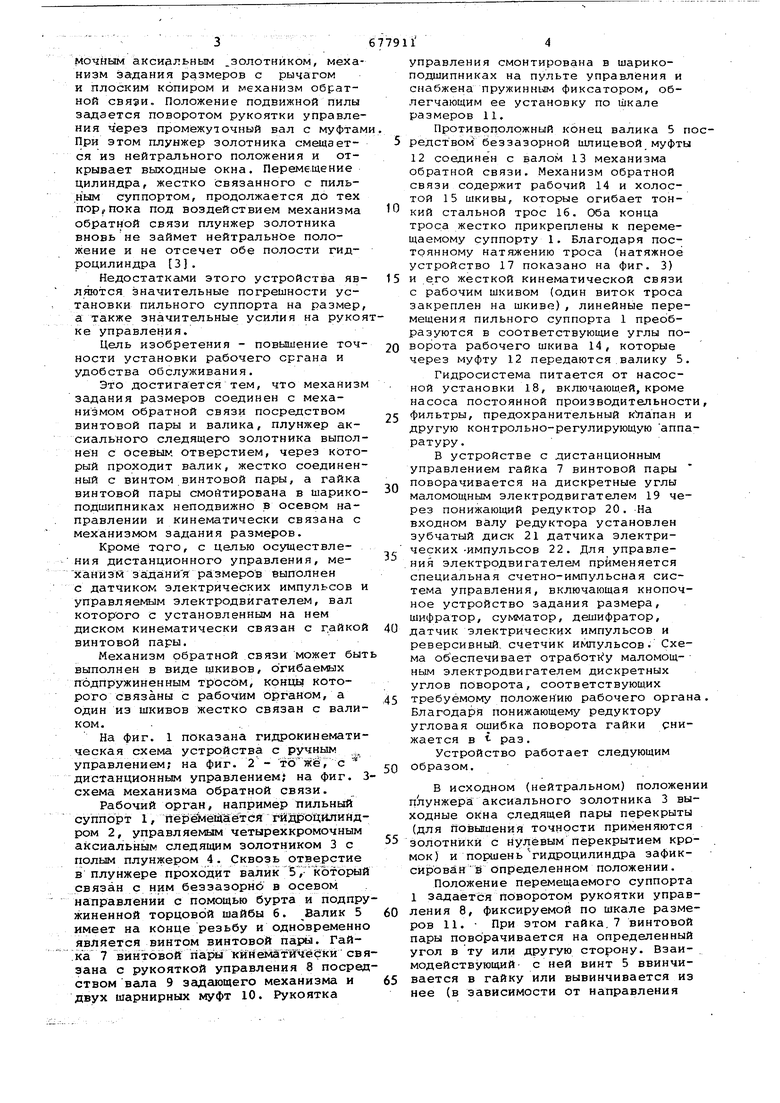
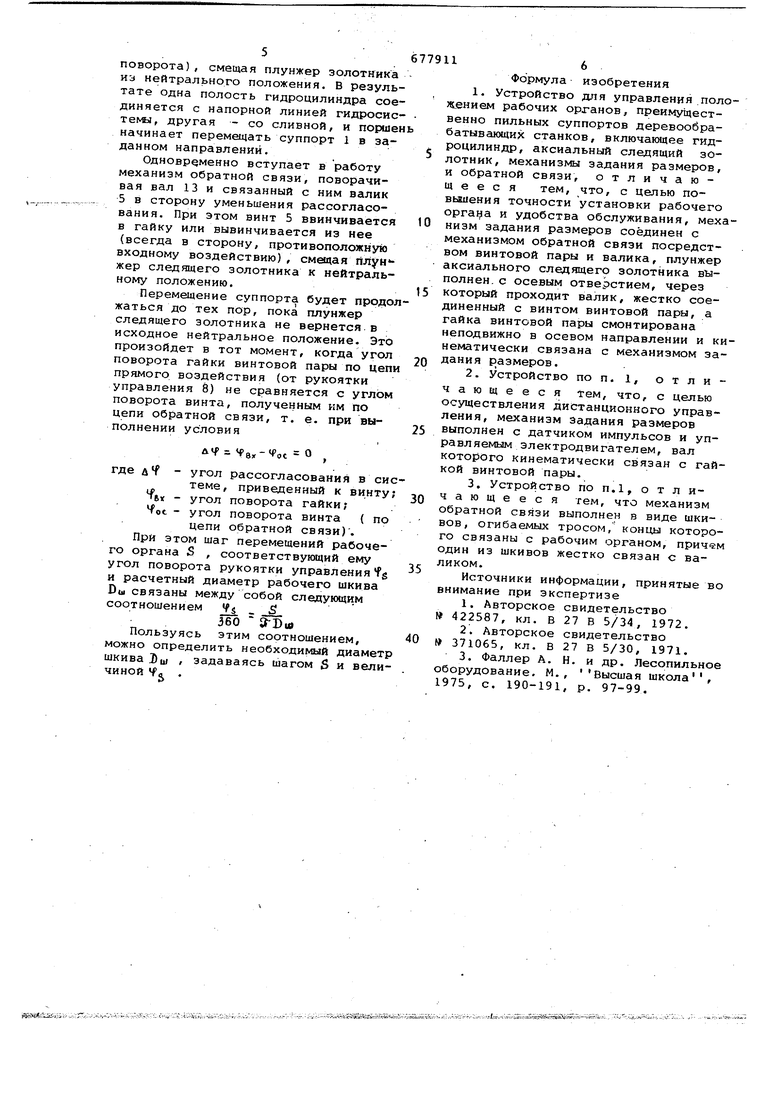
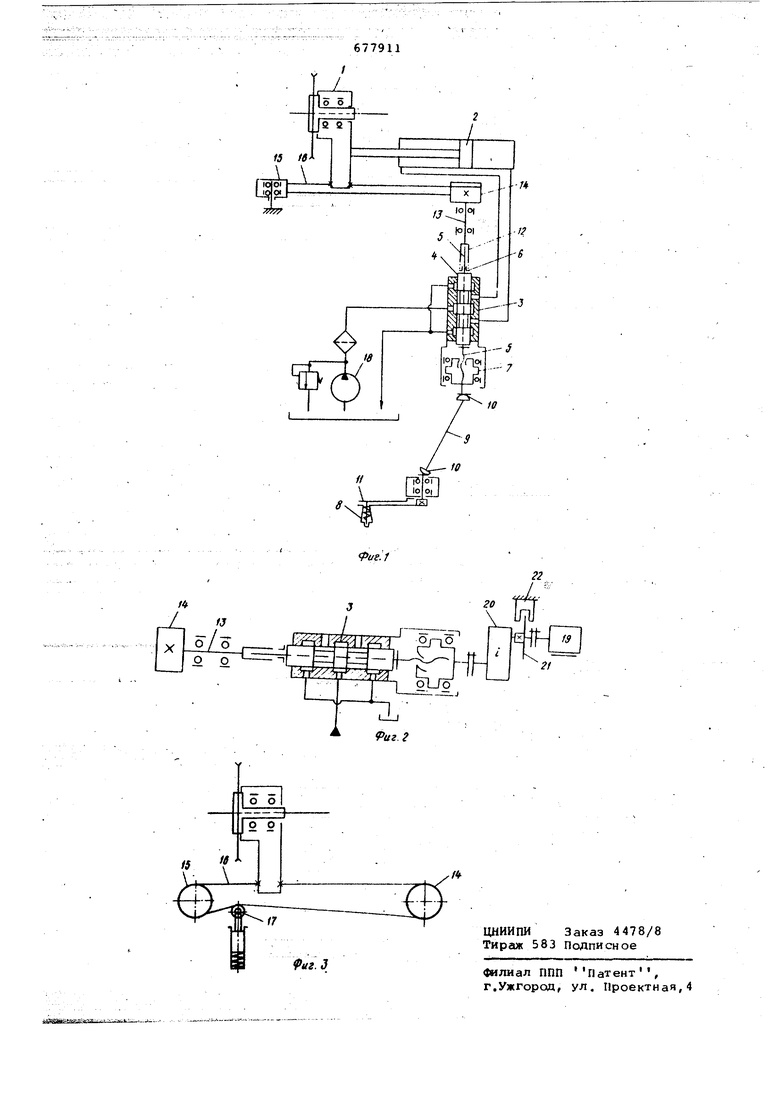
На фиг. 1 показана гидрокинематическая схема устройства с ручным ., управлением; на фиг. 2 - тожё, с дистанционным управлением, на фиг. 3схема механизма обратной связи.
Рабочий орган, например ттильньлй суппорт 1, пёраиёгдаётся гййроцйлиндром 2, управляемым четырехкромочным аксиальным следящим золотником 3 с полым плунжером 4. Сквозь отверстие в плунжере проходит валик 5,- который связан с ним беззазорно в осевом направлении с помощью бурта и подпружиненной торцовой шайбы 6. Валик 5 имеет на конце резьбу и одновременно является винтом винтовой пары. Гай.ка 7 винтовой пары кйнетлатйчёскй связана с рукояткой управления 8 посредством вала 9 задающего механизма и двух шарнирных муфт Ю. Рукоятка
управления смонтирована в шарикоподшипниках на пульте управления и снабжена пружинньлм фиксатором, облегчающим ее установку по Шкале размеров 11.
Противоположный конец валика 5 предством беззазорной шлицевой муфты 12 соединен с валом 13 механизма обратной связи. Механизм обратной связи содержит рабочий 14 и холостой 15 шкивы, которые огибает тонкий стальной трос 16. Оба конца троса жестко прикреплены к перемещаемому суппорту 1. Благодаря постоянному натяжению троса (натяжное устройство 17 показано на фиг. 3) и его жесткой кинематической связи с рабочим шкивом {один виток троса закреплен на шкиве), линейные перемещения пильного суппорта 1 преобразуются в соответствующие углы поворота рабочего шкива 14, которые через муфту 12 передаются валику 5.
Гидросистема питается от насосной установки 18, включаюш.ей, кроме насоса постоянной производительност фильтры, предохранительный к тапан и другую контрольно-регулирующую аппаратуру.
В устройстве с дистанционным управлением гайка 7 винтовой пары поворачивается на дискретные углы маломощным электродвигателем 19 через понижающий редуктор 20. -На входном валу редуктора установлен зубчатый диск 21 датчика электрических -импульсов 22. Для управления электродвигателем применяется специальная счетно-импульсная система управления, включающая кнопочное устройство задания размера, шифратор, cytvBviaTop, дешифратор, датчик электрических импульсов и реверсивный, счетчик иршульсов. Схема обеспечивает отработк у маломощ- ным электродвигателем дискретных углов поворота, соответствующих требуемому положению рабочего орган Благодаря понижающему редуктору угловая ошибка поворота гайки снижается в раз.
Устройство работает следующим образом.
В исходном (нейтральном) положен плунжера аксиального золотника 3 выходные окна следящей пары перекрыты (для повышения точности применяются золотники с нулевым перекрытием кромок) и поршеньгидроцилиндра зафиксирован и Определенном положении.
Положение перемещаемого суппорта 1 задается Поворотом рукоятки управления 8, фиксируемой по шкале размеров 11. При этом гайка.7 винтовой пары поворачивается на определенный угол в ту или другую cTOipoHy. Взаимодействующий с ней винт 5 ввинчивается в гайку или вывинчивается из нее (в зависимости от направления поворота), смещая плунжер золотника из нейтрального положения. В результате одна полость гидроцилиндра соединяется с напорной линией гидросисTeN«J, другая - со сливной, и поршен начинает перемещать суппорт 1 в заданном направлений. Одновременно вступает в работу механизм обратной связи, поворачивая вал 13 и связанный с ним валик 5 в сторону уменьшения рассогласования. При этом винт 5 ввинчивается в гайку или вывинчивается из нее (всегда в сторону, противоположную входному воздействию) , смещая следящего золотника к нейтральному положению. Перемещение суппорта будет продо жаться до тех пор, пока плунжер следящего золотника не вернется в исходное нейтральное положение. Это произойдет в тот момент, когда угол поворота гайки винтовой пары по цеп прямого воздействия (от рукоятки управления 8) не сравняется с углом поворота винта, получе 1Ным им по цепи обратной связи, т. е. при выполнении условия ulf О , где - угол рассогласования в си теме, приведенный к винту бх - угол поворота гайки; ot - угол поворота винта ( по цепи обратной связи). При этом шаг перемещений рабочего органа S , соответствукяций ему угол поворота рукоятки управлениями и расчетный диаметр рабочего шкива Сы связаны между собой следующим соотношением Уд $ 360 ShDu Пользуясь зтим соотношением, можно определить нeoбxoди IЫй диамет шкива Dm , задаваясь шагом S и вели чиной Ча . Формула изобретения 1.Устройство для управления положением рабочих органов, преимущественно пильных суппортов деревообрабатывающих станков, включающее гидроцилиндр, аксиальный следящий золотник, механизмы задания размеров, и обратной связи, отличающееся тем, что, с целью повыиения точности установки рабочего oprai a и удобства обслуживания, механизм задания размеров соединен с механизмом обратной связи посредством винтовой пары и валика, плунжер аксиального следящего золотника выполнен, с осевым отверстием, через который проходит валик, жестко соединенный с винтом винтовой пары, а гайка винтовой пары смонтирована неподвижно в осевом направлении и кинематически связана с механизмом задания Еэазмеров. 2.Устройство по п. 1, отличающееся тем, что, с целью осуществления дистанционного управления, механизм задания размеров выполнен с датчиком импульсов и управляемым электродвигателем, вал которого кинематически связан с гайкой винтовой пары. 3, Устройство по п.1, о т л ичающееся тем, что механизм обратной связи выполнен в виде шкивов, огибаемых тросом/ концы которого связаны с рабочим органом, причем один из шкивов жестко связан с валиком. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство № 422587, кл. В 27 В 5/34, 1972. 2.Авторское свидетельство 371065, кл. В 27 в 5/30, 1971. 3.Фаллер А. Н. и др. Лесопильное оборудование, М., Высшая школа , 1975, с. 190-191, р. 97-99.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| Устройство для управления подачейНОжЕВОгО СуппОРТА лущильНОгО CTAHKA | 1979 |
|
SU816745A1 |
| Устройство для управления подачей ножевого суппорта лущильного станка | 1988 |
|
SU1676804A1 |
| Устройство для позиционирования рабочих органов деревообрабатывающих станков | 1987 |
|
SU1412945A1 |
| Устройство для управления золотниковым распределителем | 1975 |
|
SU563133A1 |
| Станок для поперечного раскроя пиломатериалов | 1983 |
|
SU1121136A1 |
| Станок для поперечной распиловки движущихся лесоматериалов | 1983 |
|
SU1108006A1 |
| Качающиеся летучие ножницы | 1973 |
|
SU554958A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Станок для шлифования лопаток | 1978 |
|
SU713086A1 |
наш
го П
rJ-H:j
21
1 OLJO
.-in-j
