1
Изобретение относится к машиностроению, в частности к грузоподъемным машинам, и предназначено для управления стрелой грузоподъемного крана, преимущественно с телескопической секцией.
Цель изобретения - повьшение производительности, и степени автоматизации стрелы с телескопической секцией.
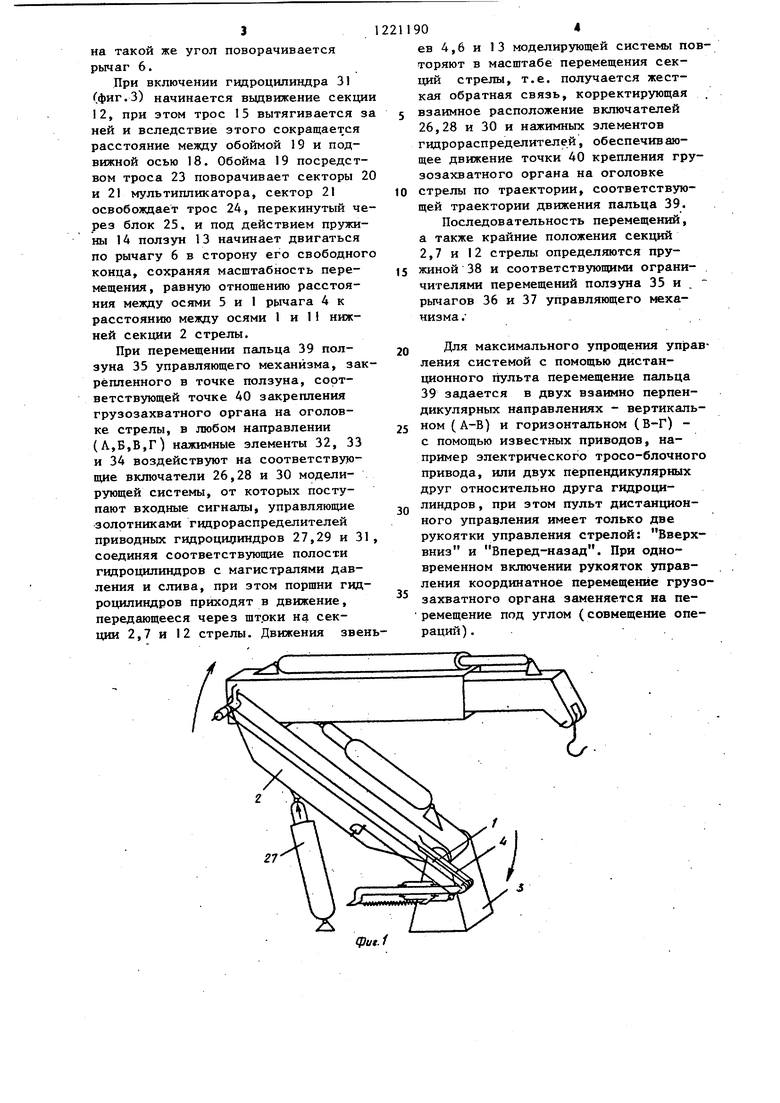
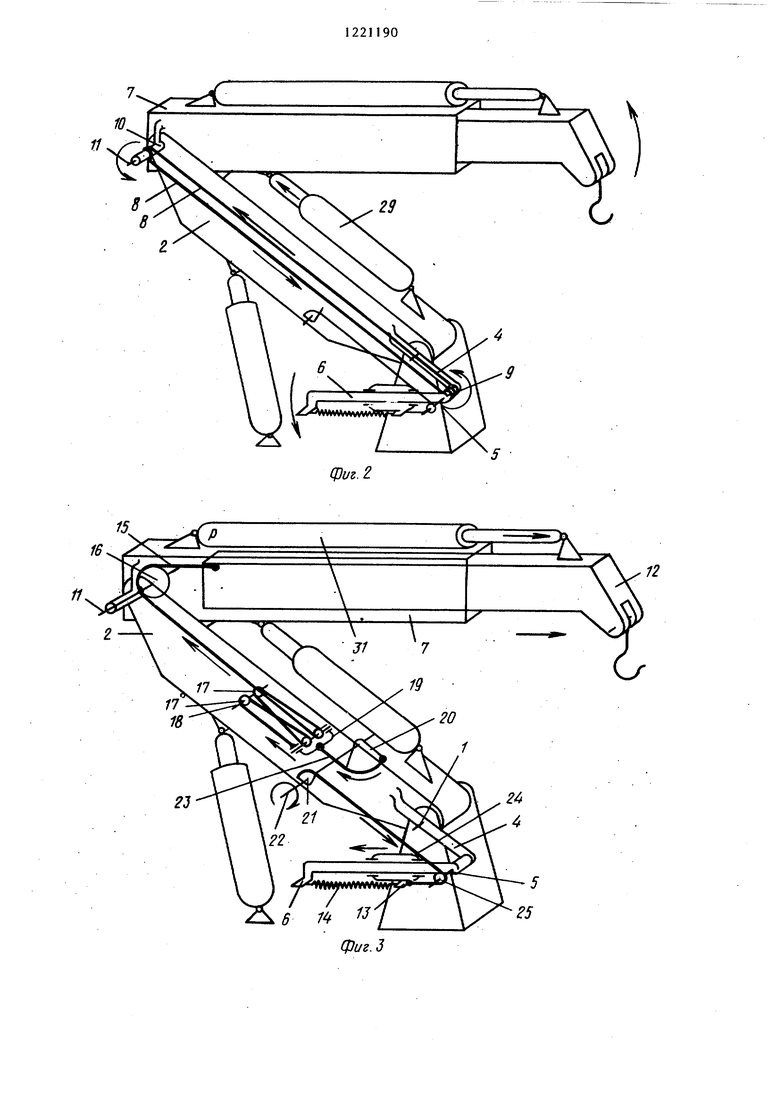
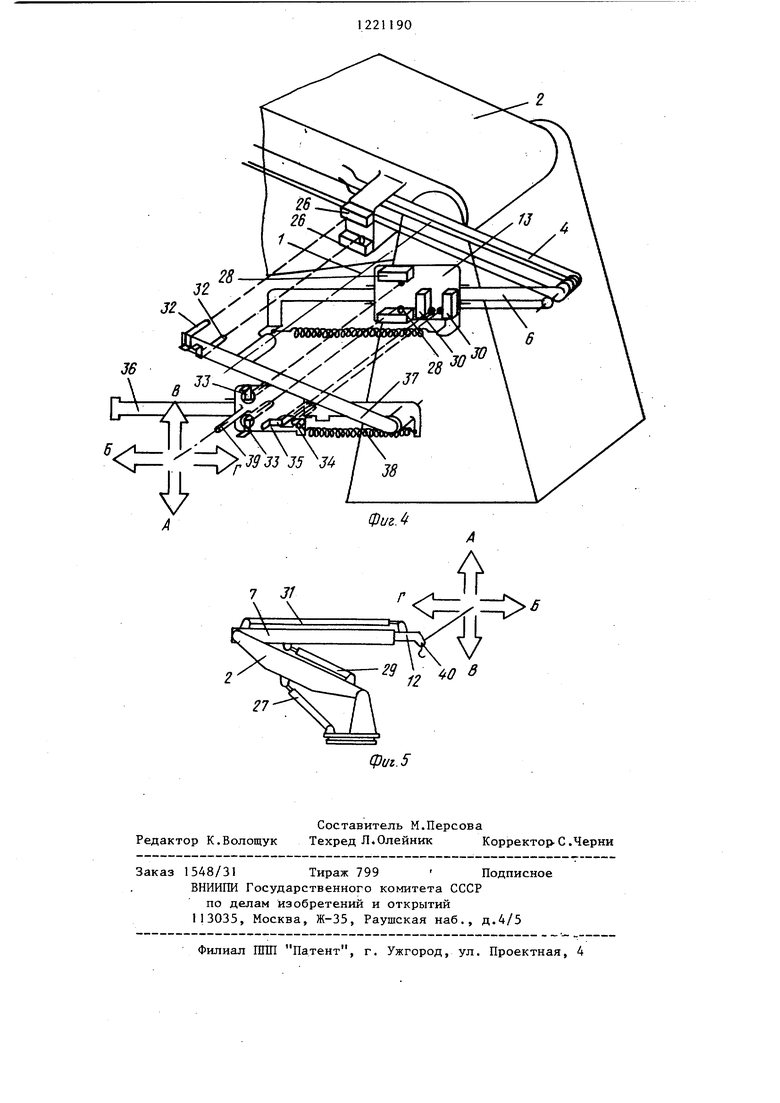
На фиг.1 представлена схема взаимодействия нижней секции стрелы с жестким рычагом моделирующей системы устройства для управления стрелой грузоподъемной мащины; на фиг.2 - схема взаимодействия верхней секции стрелы с поворотным рычагом моделирующей системы; на фиг.З - схема взаимодействия вьщ- вижной секции стрелы с ползуном моделирующей системы; на фиг.4 - схема взаимодействия включателей системы моделирования с нажимными элементами управляющего механизма; на фиг.З - схема управляющего механизма.
Устройство для управления стрело грузоподъе.мной машины выполнено следующим образом. На оси 1 (фиг.1) ..СО1единения нижней секции 2 и стрелы с основанием 3 расположен поворотный рычаг 4, жестко соединенный с нижней секцией 2 стрелы, масштабн моделирующий перемещения нижней секции. На оси 5 (фиг. 2) , жестко закрепленной на конце рычага 4, расположен поворотный рычаг 6, моделирующий перемещения верхней секции 7 стрелы, связанный с ней посредством тросовой системы 8, намотанной на втулку 9 рычага 6 и на втулку 1 О, имеющую одинаковый с втулкой 9 диаметр, сидящую на оси 11, соединяющей нижнюю 2 и верхнюю 7 секции стрелы, и прикреп- ленную к верхней секции 7.
Вьщвижная секция 12 стрелы (фиг.З) и моделирующий ее перемещения ползун 13, перемещающийся по рычагу 6 под действием пружин 14, соединены между собой следующим образом. Трос 15, закрепленный через блок 16, сидящий на оси 11 соединения нижней 2 и верхней 7 секций стрелы, и совместно с блоками 17, сидящими на оси 18, закрепленной на нижней секции 2 стрелы и обоймой 19, образует ходоуменьшител211902
ный полиспаст. Этой же цели служит мультипликатор, состоящий из двух секторов 20 и 21, жестко закрепленных на одной оси 22. При этом
5 обойма 19 соединена с сектором 20 мультипликатора (большим) тросом 23, ,а сектор 21 (меньший) соединен тросом 24,. перекинутым через блок 25, сидящий на оси 5 рычага 4 с
ползуном 13.
Рычаги 4 (фиг.4) и 6 и ползун 13 являются элементами системы, масштабно моделирующей перемещения всех звеньев стрелы. На нижней секции 2
5 стрелы и ползуна 13 закреплены включатели 26 и 28 приводов: 26 - гидроцилиндра 27 подъема нижней секции 2 стрелы, 28 - гидроцилиндра 29 подъема верхней секции 7 стрелы и 30 20 гидроцилиндра 31 выдвижения секции
12стрелы, на которые воздействуют нажимные элементы соответственно 32, 33 и 34, закрепленные на ползуне 35, перемещающемся вдоль рычага 36,
25 щарнирно соединенного с рычагом 37, сидящим .на одной оси 1 с рычагом 4 моделирующей системы . Плечи 37 и 36 соответственно рычагов 4 и 6, а также рабочие перемещения ползунов
30 13 и 35 равны между собой.
Рычаги 37 и 36 и ползун 35, подпружиненный пружиной 38, являются элементами управляющего механизма и имеют размеры и перемещения соот35 ветственно рычагов 4 и 6 и ползуна
13моделирующей системы. Посредством пальца 39, расположенного в точке управляющего механизма, соответствующей точке 40 крепления
40 грузозахватного органа на оголовке стрелы, управляющий механизм соединен с приводом вертикального (А-В) и горизонтального (Б-Г) перемещения. Работа устройства осуществляется
45 следующим образом.
При включении гидроцилиндра 27 (фиг.1) подъема нижней секции 2 стрелы и поворота ее на определенный угол на такой- же угол поворачивается
50 рычаг 4, сидящий на оси 1 соединения нижней секции 2 стрелы с основанием 3 и жестко соединенный с нижней секцией 2 стрелы, моделирующий перемещения нижней секции.
55 При включении гидроцилиндра 29 (фиг.2) подъема верхней секции 7 стрелы и повороте ее на определенный угол посредством тросовой системы 8
3
на такой же угол поворачивается рычаг 6.
При включении гвдроцилиндра 31 (фиг.З) начинается выдвижение секции 12, при этом трос 15 вытягивается за ней и вследствие этого сокращается расстояние между обоймой 19 и подвижной осью 18. Обойма 19 посредством троса 23 поворачивает секторы 20 и 21 мультипликатора, сектор 21 освобождает трос 24, перекинутый через блок 25. и под действием пружины 14 ползун 13 начинает двигаться по рычагу 6 в сторону его свободного конца, сохраняя масштабность перемещения , равную отношению расстояния между осями 5 и 1 рычага 4 к расстоянию между осями 1 и 11 нижней секции 2 стрелы.
При перемещении пальца 39 ползуна 35 управляющего механизма, закрепленного в точке ползуна, соответствующей точке 40 закрепления грузозахватного органа на оголовке стрелы, в любом направлении (Л,Б,В,г) нажимные элементы 32, 33 и 34 воздействуют на соответствуто- щие включатели 26,28 и 30 моделирующей системы, от которых поступают входные сигналы, управляющие золотниками гидрораспределителей приводньпс ГИДРОЦЩ1ИНДРОВ 27,29 и 31, соединяя соответствующие полости гвдроцилиндров с магистралями давления и слива, при этом поршни гидроцилиндров приходят в движение, передающееся через штоки на секции 2,7 и 12 стрелы. Движения звень211904
ев 4,6 и 13 моделирующей системы повторяют в масштабе перемещения секций стрелы, т.е. получается жесткая обратная связь, корректирующая 5 взаимное расположение включателей 26,28 и 30 и нажимных элементов гвдрораспределителей, обеспечивающее движение точки 40 крепления грузозахватного органа на оголовке
10 стрелы по траектории, соответствующей траектории движения пальца 39. Последовательность перемещений, а также крайние положения секций 2,7 и 12 стрелы определяются пру15 жиной 38 и соответствующими ограничителями перемещений ползуна 35 и . рычагов 36 и 37 управляющего механизма .
20 Для максимального упрощения управления системой с помощью дистанционного пульта перемещение пальца 39 задается в двух взаимно перпендикулярных направлениях - вертикаль25 ном (А-В) и горизонтальном (В-Г) - с помощью известных приводов, например электрического тросо-блочного привода, или двух перпендикулярных друг относительно друга гидроциQ линдров, при этом пульт дистанционного управления имеет только две рукоятки управления стрелой: Вверх- вниз и Вперед-назад. При одновременном включении рукояток управления координатное перемещение грузозахватного органа заменяется на пе- ремещение под углом (совмещение операций) .
27
cput.l
фиг. 2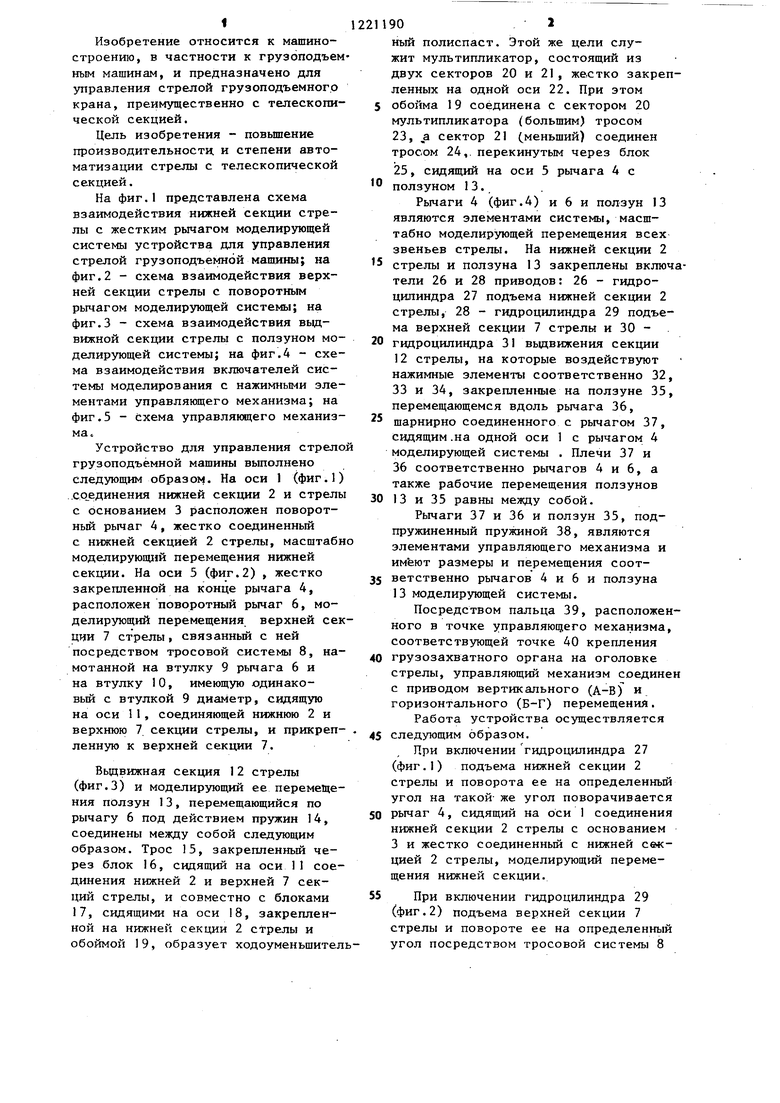
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1768497A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| УСТАНОВКА ДЛЯ СБОРА ПЛАВАЮЩЕЙ И ОСЕВШЕЙ ДРЕВЕСИНЫ НА ВОДОХРАНИЛИЩАХ | 2009 |
|
RU2449916C2 |
| Устройство для разрушения высокопрочных материалов | 1983 |
|
SU1105574A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Грузоподъемное устройство | 1990 |
|
SU1791348A1 |
| Станок для монтажа секций механизированной крепи и конвейера | 1982 |
|
SU1084455A1 |
| Гидравлический грузоподъемный кран | 1979 |
|
SU856967A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1983 |
|
SU1172873A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
Sc
г5
фиг. 5
27
29 ; G в
Составитель М.Персова Редактор К.Волощук Техред Л Олейник Корректор.С.Черни
Заказ 1548/31 Тираж 799 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
фиг.5
| Устройство для управленияСТРЕлОй гРузОпОд'ЕМНОй МАшиНы | 1978 |
|
SU800292A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
