Изобретение относится к станкостроению, а именно к механизмам, обеспечивающим линейные перемещения различных деталей, узлов и их позиционирование для контроля, измерения, сборки или других операций.
Цель изобретения - расширение технологических возможностей за счет обеспечения возможности перемещения кареток в любую точку координат .
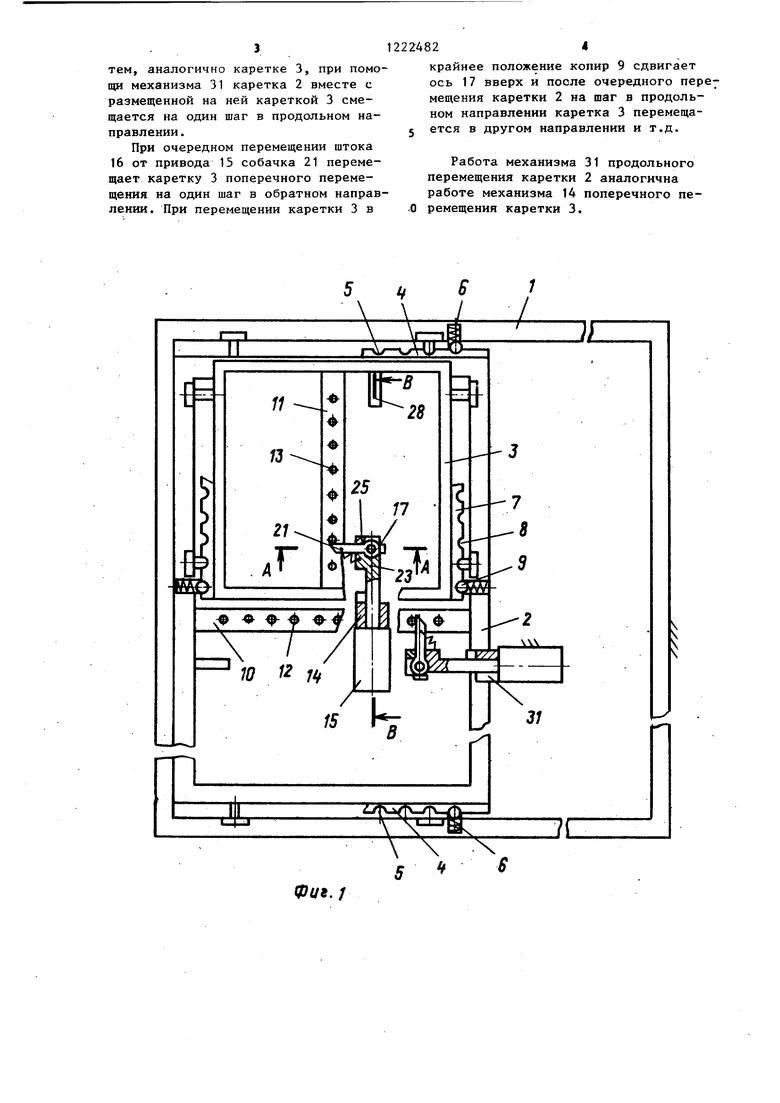
На фиг. 1 изображен двухкоор- динатный стол; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - механизм поперечного перемещения каретки.
Двухкоординатньй стол содержит основание t, каретку 2 продольного перемещения и каретку 3 поперечного перемещения. Каретка 2 содержит плап ки 4 с пазами 5 и подпружиненные фиксаторы 6, закрепгенные на основаНИИ 1, а каретка 3 содержит планки 7 с пазами 8 и подпружиненные фиксаторы 9, закрепленные на каретке 2.
На каретках 2 и 3 установлены соответственно планки 10 и 11 с пальцами 12 и 13. Расстояние между пальцами 12 и 13 в двух взаимно перпендикулярных направлениях равно шагам перемещения кареток 2 и 3 по этим направлениям. .
На каретке 2 закреплен механизм 14 поперечного перемещения каретки 3, содержащий провод 15, например пневмоцилиндр, на подвижном штоке 16 которого установлены на оси 17, содержащей кольцевые конические проточки 18 и 19, взаимодействующие с подпружиненным фиксатором 20 собачки 21 и 22. Собачки 21 и 22 взаимодействуют соответственно с упорами 23 и 24, расположенными на подвижном штоке 16, и соответственно с упорами 25 и 26, расположенными на неподвижной направляющей 27. На каретке 3 закреплены копиры 28 и 29, содержащие скосы 30. Конструкция механизма 31 продольного перемещения каретки 2 аналогична конструкции механизма 14, при этом механизм 31 закреплен . на основании 1 -и повернут в плоскости стола на 90 низма 14.
относительно мехаДвухкоординатный стол работает, следующим образом.
ito
15
20
25
2224822
Поперечное движение каретки 3 осуществляется механизмом 14 ::;)И помощи привода 15, например пневмо- цилиндра, перемещающего шток 16 в
5 направляющей 27 из одного крайнего положения в другое, при этом собачка 22, взаимодействуя с одним из пальцев 13, перемещает каретку 3 на один шаг. Упор 24 предотвращает поворот собачки 22 при перемещении каретки, а упор 26 - перемещение каретки 3 по инерции на величину больше одного шага следующим образом. После перемещения каретки 3 собачка 22, взаимодействующая с одним из пальцев 13, на один шаг положение каретки фиксируется подпружиненными фиксаторами 9, заходящими в , в пазы 8 планок 7, закрепленными на каретке 3. В связи с возможными ко- лебаниями давления воздуха в пнев- мосети, изменениями веса груза, перемещаемого столом в процессе работы, возможны перемещения каретки 3 по инерции на величину больше одного шага, при этом собачка 22 проворачивается под действием следующего пальца 13 (при отсутствии упора 26), а планки 7 с пазами 8 перемещаются
2Q на величину больше одного шага,
отжимая фиксаторы 9. Для исключения перемещения каретки 3 на величину больше одного шага служит упор 26, расположенньй на направляющей 27, препятствующий повороту собачки 22 в крайнем положении, тем самым не позволяя каретке перемещаться на величину больше одного шага, так как следующий палец 13 каретки упирается в собачку 22. Точная фиксация каретки 3 обеспечивается фиксатором 9. При обратном ходе штока 16 собачка 22 проворачивается и заходит в зацепление со следующим пальцем 13, подготавливая перемещение каретки 3 на следующий шаг. При очередном перемещении штока 16 собачка 22 перемещает каретку 3 на очередной шаг и т.д.
При перемещении какаретки 3 в крайнее нижнее положение ось 17 находит на скос 30 копира 28 и перемещается вниз, при этом фиксатор переходит из конической проточки 19 в коническую проточку 18 и удерживает в этом положении ось 17, а собачка 22 выходит из зацепления с пальцами 13, обеспечивая зацепле-/ ние пальцев 13 с собачкой 21. За35
40
45
50
55
тем, аналогично каретке 3, при помо пщ механизма 31 каретка 2 вместе с размещенной на ней кареткой 3 смещается на один шаг в продольном направлении .
При очередном перемещении штока 16 от привода 15 собачка 21 перемещает каретку 3 поперечного перемещения на один шаг в обратном направ лении. При перемещении каретки 3 в
2224824
крайнее положение копир 9 сдвигает ось 17 вверх и после очередного перемещения каретки 2 на шаг в продольном направлении каретка 3 перемеща- с ется в другом направлении и т.д.
Работа механизма 31 продольного перемещения каретки 2 аналогична работе механизма 14 поперечного пе- .0 ремещения каретки 3.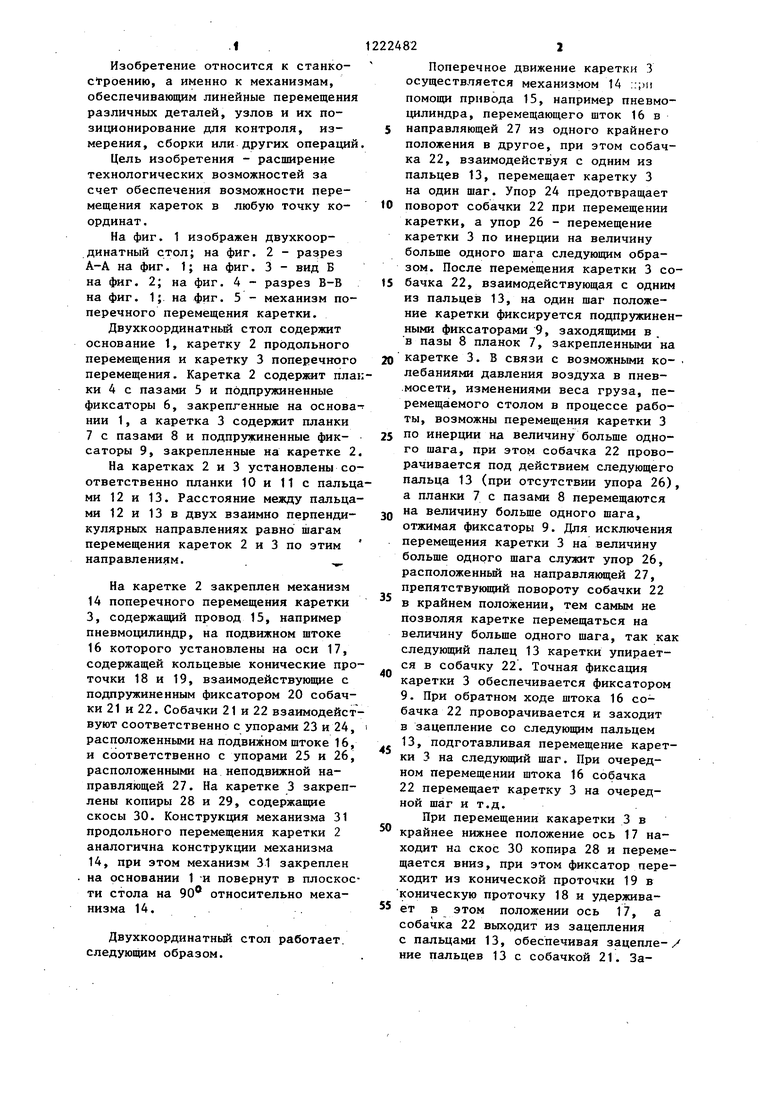
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный стол с шаговым перемещением | 1985 |
|
SU1433750A1 |
| Устройство для приема и выдачи штанг на буровом станке | 1974 |
|
SU485217A1 |
| Устройство для укладки ампул в кассету | 1988 |
|
SU1622224A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство для упаковки штучных изделий в картонные коробки | 1986 |
|
SU1458279A1 |
| Устройство для ориентирования изделий на конвейере | 1985 |
|
SU1281488A1 |
| Грейферное устройство для перемещения заготовок между рабочими позициями многопозиционного пресса | 1986 |
|
SU1484415A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОКАРНЫМ СТАНКОМ | 1940 |
|
SU63198A1 |
| Полуавтомат для сборки деталей электротехнических изделий | 1985 |
|
SU1398002A1 |
| Скороморозильный аппарат для упакованных пищевых продуктов на поддонах | 1985 |
|
SU1330427A1 |
Фиг./
;,
Ч 4.- -
tJit
1
Jt.
JLL
-28
-да
25 17
I/
Zif
/
.m
30
гз
гз
w
2S
I
I
I-.
-15
QJu. У
,i.
n
i
n
11
9ut. S
ВНИИПИ Заказ 1651/14 Тираж 826 .Подписное Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 754525, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
