/
п
I 7/ 3/ 35 27
7 1 Т 35 Z6 30
фиг.З
33 Ю
з153
Изобретение относится к машиностроению, в частности к промышленным ро ботам и манипуляторам.
Цель изобретения - улучшение диагностических характеристик за счет снижения массы подвижных частей конструкции .
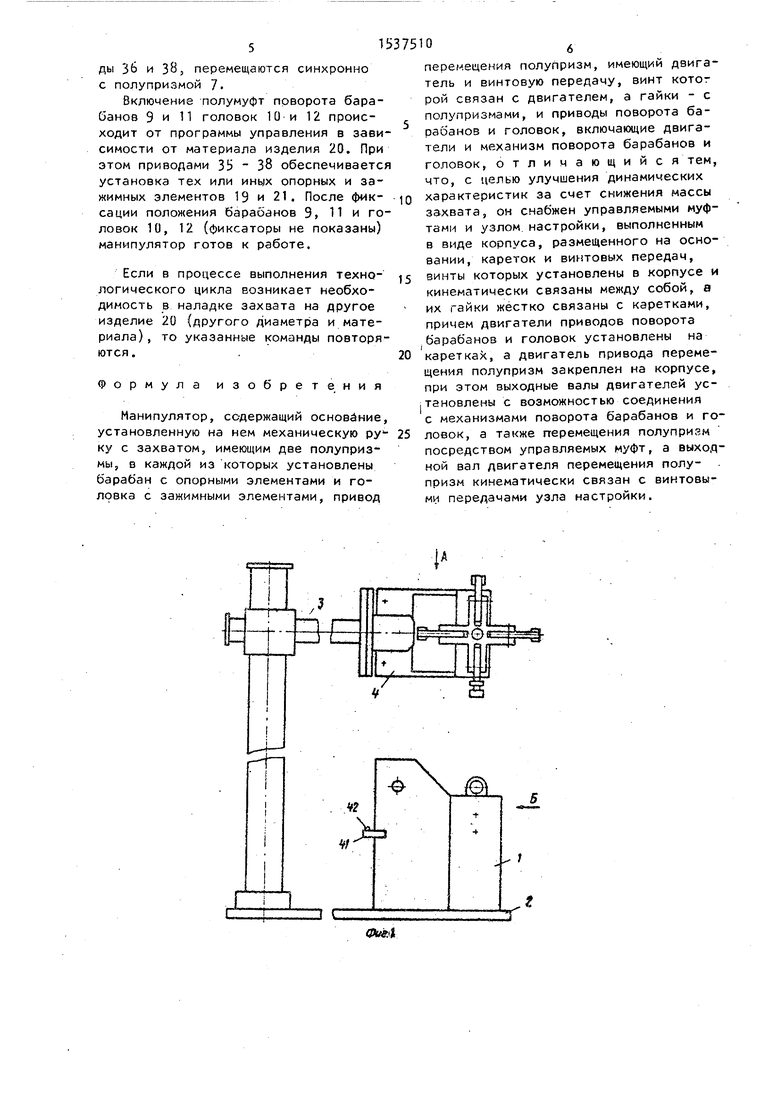
На фиг. 1 показан манипулятор, общий оид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Ь на фиг. 1 (манипулятор в позиции настройки захвата),
Манипулятор состоит из основания 1 узла настройки 2, механический руки 3 и захвата t, содержащего пальцы в виде поворотных рычагов 5 и ладонь из двух попупризм 6 и 7 установленных на механической руке 3 с возможностью сближения ими расхождения в плоскости, перпендикулярной к оси мехоничес кой руки 3. Перемещение полупризм 6 |и 7 осуществляется винтом 8, имеющим разнонаправленную резьбу для каждой полупризмы.
В полупризме 6 смонтированы бара- бан 9 и головка 105 а в полупризме 7 - соответственно барабан 11 и головка 12. Валы 13 и И барабанов 9 ч 11 расположены вдоль наклонной поверхности полупризм 6 и 7) Ј валы i5 ,16 головок 10 и 12 установлены в зад- них ее стенках 17 и 18 соогветсгзен- но. Оси валов 13 и 14 барабанов S и 11 и. оси валов 1Ь и 1б головок взаимно перпендикулярны. По окружности каждого барабана 3 и 11 смонтированы опорные элементы 19 из различных материалов и разных конструкций, напоинер надувные резиновые подушки, мет а пли™ ческие или пластмассовые ППРСГИНКИ, пластинки с телами качения и т.п. Поворотные рычаги i установлены ради- ально в пазах каждой головки 10 и 12, а их концы, обращенные к изделию 20, снабжены зажимными элементами 21,
Каждый рычаг 5 имеет возможность поворачиваться вокруг оси 22 и взаимодействовать с приводом 23 через шток 2k, причем с последним озаимодеж. гву ет только тог рычаг 5 который в дан™ ный комснт предназначен для зажима детали. В исходном положении рычаги 5 отведены от изделия 20 посредством пружины 2Ь, Узел настройки 2 состоит из корпуса, установление1 о на основании I, кареток 26 - 29, bHinos передач, винты 30 - 33 УСТ -ОВЛР iv ч 3 on и кинематически crn,uvo собой, а их гайки честк СВРЗЭ
0
51
J
0
g
5 0
05
5
5
О4
ретками 26 29, двигателей 3 привода перемещения попугоизм, установленных на корпусе, двигателей 35 и 3& приводов поЕооотр барабанов и приво- доп 37 и зЗ позорэта головок, установленных нэ соответствующих каретках 26-29. Каждый из перечисленных приводов 3 38 снабжен управляемой муфтой, составленной из двух полумуфт 39 и 0. Первая полумуфта 39 связана с программой управления и установлена на гшходном валу кажпого -, иггт еля из -01мгнутых прмзодоЬ; г ьгэрая полумуф- 1э 40 смонтирована в захвате неподвижно на торце каждого зала , а также у винта Ь. Соосное положение полумуфт 39 двигателей и полуму Ьт ilO захвата, т.е. его валов и вин га 8 поддерживается при перемещении полупризм Ь и 7 за счет того, что приводы З Ь 3В смонтированы на каретках Lh - 29, расположенных на винтах 3U - 33, а выходной вал двигателя З 1 перемещения полупризм 6 и 7 кинематически связан с винтами . Такая конструктивная особенность обеспечивает синхронное перемещение каое- гок 26 и 28 с полупризмой 6, а IQK 17 и 29 с полупризмой 7- Вертикальное перемещение захвата ня гози- цию у, па настпсмки 2 ограничивается упором с конечным выключаTejом 2,
Манилу Г Ч гор эаО отает следующим ои- разом.
OKI не -1 1 манипулятора Б оа- Ьоту и пеоб од1мости настройKI захвата иа работу с ем или чьм изделием 2U подается команда, после которой ( вхаиическая рука 3, поворачиваясь вокруг вертикальной колонны и опускаясь зьиз, занимает положение на позицию узла настрочки 2 захвата. При этом полумуфты tO валов 13-16 и винта 8 занимают соосное положзние с соот-х ветствующими полукуфтами 39, расположенными па выходньх вала к двигателей . Включаются полумуфты 39 и АО выпи 8 ,1 двигателя 3. Включение последнего приводит к перемещению полу- гюизм 6 и 7 которые в зависимости or направления вращения винта 8 сближаются или удаляются на расстояние, необходимое для работы с конкретным диаметре i изделия 20. Синхронно с полупризмой Ь перемещаются каретки 26 и Я8, несущие приводы 35 и 37. В то ке spe. iP кзоетки 27 и 29, несущие приво™
ды 36 и 3В, перемещаются синхронно с полупризмой 7.
Включение полумуфт поворота барабанов 9 и 11 головок 10 и 12 происходит от программы управления в зависимости от материала изделия 20. При этом приводами 35 - 38 обеспечивается установка тех или иных опорных и зажимных элементов 19 и 21. После фиксации положения барабанов 9, 11 и головок 10, 12 (фиксаторы не показаны) манипулятор готов к работе.
Если в процессе выполнения технологического цикла возникает необходимость в наладке захвата на другое изделие 20 (другого диаметра и материала), то указанные команды повторяются .
Формула изобретения
Манипулятор, содержащий основание, установленную на нем механическую ру- ку с захватом, имеющим две полупризмы, в каждой из которых установлены барабан с опорными элементами и головка с зажимными элементами, привод
0
5
0
5
перемещения полупризм, имеющий двигатель и винтовую передачу, винт котог рой связан с двигателем, а гайки - с полупризмами, и приводы поворота барабанов и головок, включающие двигатели и механизм поворота барабанов и головок, отличающийся тем, что, с целью улучшения динамических характеристик за счет снижения массы захвата, он снабжен управляемыми муфтами и узлом настройки, выполненным в виде коопуса, размещенного на основании, кареток и винтовых передач, винты которых установлены в корпусе и кинематически связаны между собой, а их гайки жестко связаны с каретками, причем двигатели приводов поворота барабанов и головок установлены на каретках, а двигатель привода перемещения полупризм закреплен на корпусе, при этом выходные валы двигателей ус- .тановлены с возможностью соединения с механизмами поворота барабанов и головок, а также перемещения полупризм посредством управляемых муфт, а выходной вал двигателя перемещения полупризм кинематически связан с винтовыми передачами узла настройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки резьбовых соединений | 1989 |
|
SU1703349A1 |
| Захват манипулятора | 1986 |
|
SU1414634A1 |
| Захват манипулятора | 1985 |
|
SU1328192A1 |
| Автомат для сборки деталей типа вал с дисками | 1988 |
|
SU1551511A2 |
| Устройство для удаления косточек из плодов | 1989 |
|
SU1651822A1 |
| Устройство для образования коврового узла на ковроткацком станке | 1977 |
|
SU737519A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Устройство для сборки деталей | 1980 |
|
SU921754A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Устройство для образования коврового узла на ковроткацком станке | 1977 |
|
SU696071A1 |

Изобретение относится к области машиностроения, в частности к промышленным роботам и манипуляторам. Целью изобретения является улучшение динамических характеристик за счет снижения массы подвижных частей конструкции манипулятора. Это достигается тем, что двигатели 34 - 38 приводов перемещений полупризм 6 и 7 и приводов поворота барабанов 9 и 11 головок 10 и 12 захвата располагаются на основании 1 в узле настройки 2. Каждый из двигателей 34 - 38 установлен с возможностью соединения с соответствующим механизмом перемещения полупризм 6 и 7 и приводами поворота барабанов 9 и 11 головок 10 и 12 посредством управляемых муфт. Каретки 26 - 29, несущие двигатели 35 - 38, синхронно перемещаются с соответствующими им полупризмами 6 и 7 от двигателя 34. 3 ил.
BuS A
24
Фие.2
| Авторское свидетельство СССР V , кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
