1
Устройство относится к балансире- вечной технике, а именно к статической балансировке поплавковых гироуз- лов в жидкости.
Цель изобретения - упрощение про- цесса балансиревки и устройства для его осуществления.
На чертеже изображено устройство для реализации предлагаемого способа
Устройство Г для определения дисба ланса поплавковых гироузлов содержит балансиревочную ванну 1 с жидкестью, установленное в ней еснование 2,закрепленные на нем опоры 3 и привод 4,
датчик 5 тока, коммутатор 6, аррети- ры 7 с якорями электромагнитов 8, измеритель 9 времени и датчик 10 угла поворота гироузла, состоящий из осветителя 11 и фотеприемника 12. На опорах 3 установлен поплавковый гироузел 13 с ротором 14.
Способ реализуют следующим образом.
Поплавковый гироузел с балансировочным приспособлением погружают в жидкость, раскручивают ротор До оборотов, при которых значение кинетического момента i меньше рабочего, но не ниже величины удельного момента демпфирования балансировочной жидкести, освобождают поплавковый гироузел от балансировочного приспособления, измеряют перемещение поплавкового гиреузла в плоскости, перпендикулярной продольной оси поплавка при выбеге гирометора, а значение дисбаланса определяют сегласне уравнению
М, t
где Н - величина кинетического мо40
45
мента гйреметора лри измерении дис баланса; Р - угловое перемещение гиреузла; t - интервал времени между моментом освобождения поплавка и фиксацией величины его перемещения . .
Максимальная акересть углового перемещения поплавкового гироузла будет при равенстве кинетического момента ротора и удельного момента демпфирования жидкости.
Устройство работает следующим об- разом.
Гироузелофиксируется в основании 2 на опорах 3 с помощью арретиров 7 яке-55 рями электромагнитов 8 так, чтобы направление вектора Н совпало с риской I (в этом положении вектор П уста35
50
2
новлен пед углем 5 к направлению оси Z).
Сигнал датчика 5 тока о величине кинетического момента Н в коммутаторе 6 сравнивается со значением удельного момента демпфирования. Коммутатор 6 синхронно запускает измеритель 9 времени, датчик 10 угла поворота гироузла, освобождает арретиром 7 поплавковый гиреузел 13 и выключает питание ротора 14 с помощью привода 4. Датчик 10 певорота за интервал времени t фиксирует величину прецессии oj поплавкового гиреузла 13.
Затем направление вектора Н сев- мещают с риской П (поворачивают Н на угол 45° в другую сторону относительно оси Z, т.е. на 90 к положению I) и определяют uJ- за тот же интервал времени t.
Величина дисбаланса по двум измерениям определяется согласно уравнению
Mas Н
Щ
ПР
I
) + (oJr)
Способ и устройство для его осуг. ществления также повьшают точность определения дисбаланса поплавкового гироузла, не уменьшая производительности труда последующей балансировочной операции.
Формула изобретения
1. Способ определения дисбаланса поплавковых гироузлов, заключающийся в том, что устанавливают гироузел в балансировочное приспособление, находящееся в жидкости, приводят во вращение ротор гироузла с помощью привода и измеряют его перемещение, отличающийся тем, чте, с целью упрощения, ротор приводят во вращение до оборотов, при которых значение кинетического момента выбирают не ниже значения удельного момента демпфирования гироузла, освобождают его от приспособления, отключают ротор от привода, измеряют угло вое перемещение гироузла в плоскости, перпендикулярной его продольной оси, а момент М от дисбаланса определяют из уравнения
М
где Н - значение кинетического момента ротора при измерении дисбаланса;
,J - угловое перемещение гироузла; t - интервал времени измерения.
2. Устройство для определения дисбаланса поплавковых гироузлов, содержащее балансировочную ванну с жидкостью, установленное в ней основание, закрепленные на нем опоры и привод, отличающееся тем.
что, с целью упрощения устройства, оно снабжено последовательно соединенными датчиком тока, коммутатором и соедине нными с опорами и приводом арретирами, измерителем времени связанным с коммутатором и датчиком угла поворота гироузла вокруг оси, перпендикулярно его продольной оси.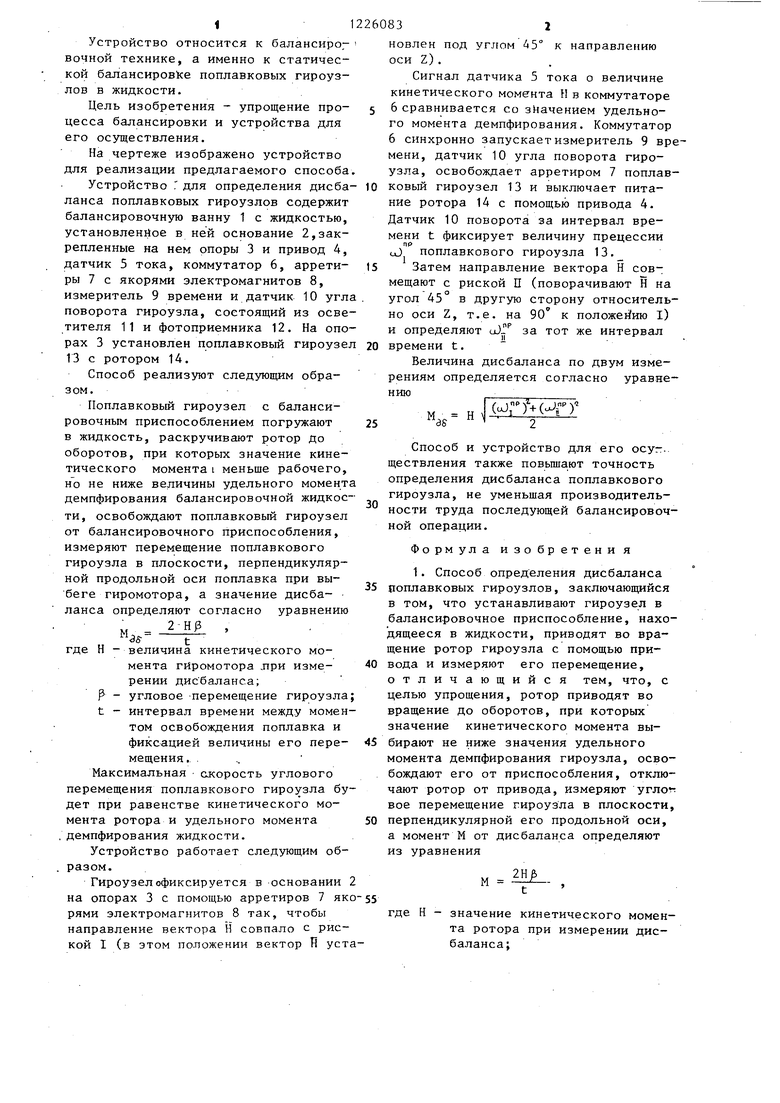
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ ГИРОМОТОРА ВДОЛЬ ОСИ ВРАЩЕНИЯ РОТОРА | 1964 |
|
SU164995A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕБАЛАНСА ГИРОУЗЛА ВИБРАЦИОННЫМ МЕТОДОМ | 2023 |
|
RU2815479C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU957026A1 |
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU983476A1 |
| Имитатор успокоителя качки корабля | 1983 |
|
SU1080190A1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| ГИРОСКОПИЧЕСКИЙ ТРЕХСТЕПЕННЫЙ ПОПЛАВКОВЫЙПРИБОР | 1966 |
|
SU182346A1 |
| СПОСОБ ПРОВЕРКИ ДЕФЕКТА ОПОР ГИРОУЗЛА В ПОПЛАВКОВОМ ГИРОСКОПИЧЕСКОМ ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2019 |
|
RU2730369C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
Изобретение относится к машиностроению и может использовать при статической балансировке поплавковых гироузлов в жидкости. Цель изобретения - упрощение процесса балансировки и конструкции устройства для его осуществления. ПоплавковЕЛй гироузел с балансировочным приспособлением погружают в жидкость раскручивают ротор до оборотов, при которых значение кинетического момента меньше рабочего, но не ниже величины удельного момента демпфирования балансировочной жидкости, освобождают поплавковый гироузел от балансировочного приспособления, измеряют перемещение гироузла в плоскости, перпенди- кулярной продольной оси поплавка при выбеге гиромотора, и определяют значение дисбаланса. 2 с.п.ф-лы, 1 ил.
Составитель С. Тимофеев Редактор А. Козориз Техред В.Кадар Корректор Ференц
Заказ 2112/30 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU957026A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ковалев М.П., Моржаков С.П | |||
| и Терехова К.С | |||
| Динамическое, и статическое уравновешивание гироскопических приб оров | |||
| - М | |||
| : Машиностроение, 1974, с 237-239. | |||
