2.Устройство по п. 1, отличающееся тем, что устройство для ориентации вкладыша вьтолнено в виде нескольких однотипных узлов, каждый из которых содержит корпус с отверстием, установленным в этом отверстии с возможностью линейного. перемещения подпружиненный шток с пазом, в котором размещена собачка, а на боковой поверхности корпуса смонтированы направляющие с ограничителями
3.Устройство по пп. 1 и 2, отличающееся тем, что в осно
Изобретение относится к обработке |Металлов давлением, в частности к устройствам автоматизациитехнологичеких процессов сборочного производстг ва, а более конкретно, к оборудовани для сборки защитных касок.
Целью изобретения является расширение технологических возможностей устройства.
Цель достигается путем обеспече- НИН сборки каски с эластичным вкладышем и держателем кабеля.
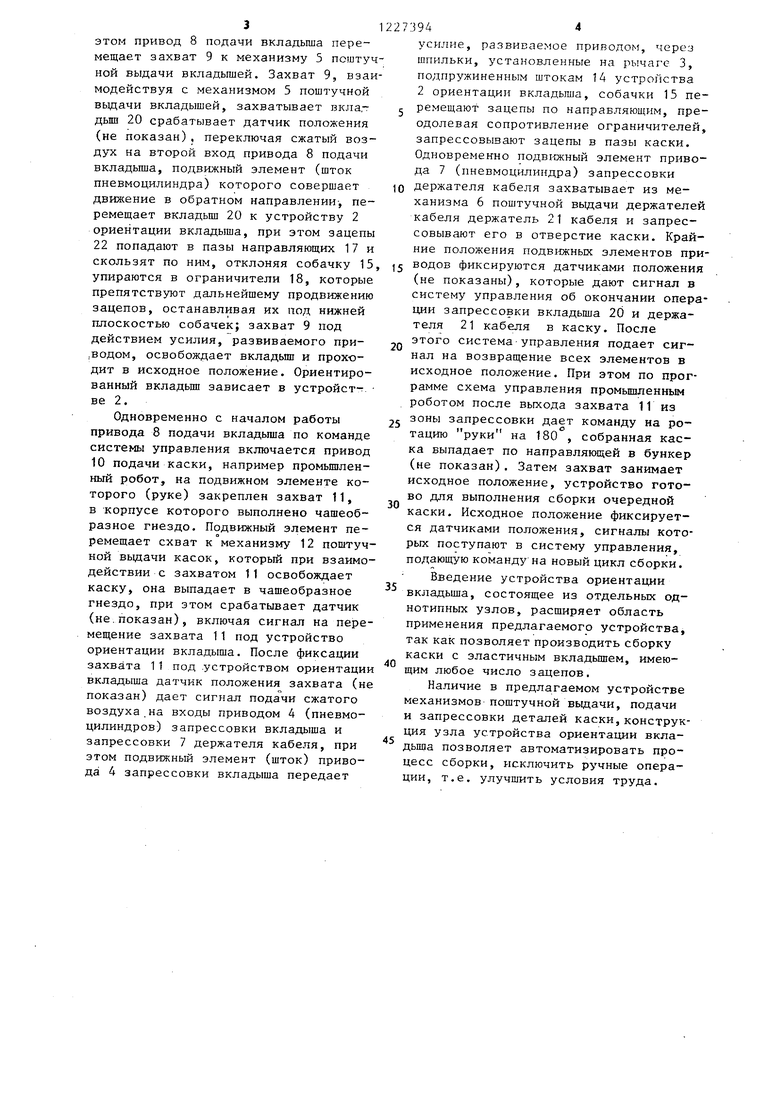
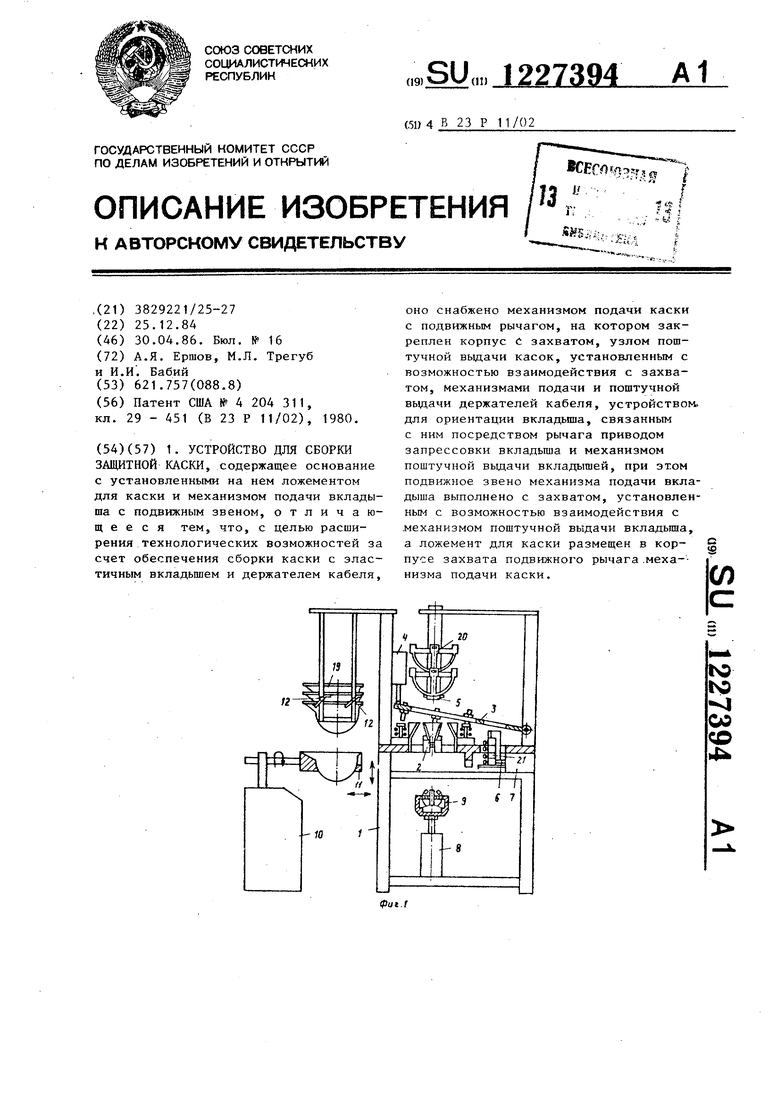
На фиг„ 1 изображено устройство для сборки защитной каски, все элементы которого находятся в исходном положении, общий вид,: на фиг. 2 - узел устройства ориентации вкладьшга, элементы которого находятся в исходном положении после фиксации в нем зацепа вкладыша; на фиг. 3 - то же, вид сверху.
Устройство для сборки защитной каски содержит основание 1 с отверстием в плите, по периметру которого закреплены шесть однотипных узлов устройства 2 ориентации вкладьш1а, рычаг 3, привод 4 запрессовки вкладыша, механизм 5 поштучной выдачи вкла дьЕпей, механизм 6 поштучной выдачи держателей кабеля, привод 7 запрес- совки держателя кабеля, привод 8 подачи вкладьтш с закрепленным на его подвижном звене захватом 9, привод 10 подачи каски с закрепленным на его подвижном звене захватом 11, в корпусе которого Быпоп1(.-но чашеобраз йое гнездо для помещения каски, механизм 12 поштучной вьщачи касок.
вании вьпюлнено отверстие , по периметру которого расположены узлы ориентап.ии вкладыша , при этом механизм подачи вкладыша и механизм поштучной вьщачи вкладышей расположены по разные стороны от устройства для ориентации вкладыша.
4, Устройство по пп. 1 3,, отличающееся тем, что количество узлов ориентации вкладыша рано числу пазов каски.
5
0 5
0
Узел устройства ориентации вкладьш а состоит из корпуса 13, подпружиненного штока 14J в пазу которого закреплена собачка 15, прижимаемая пружиной 16, на боковой плоскости корпуса закреплен:ь две направляющие 17 с ограничителями 18,
Защитная каска содержит три детали: каску 19 вкладьш 20, держатель 21 кабеля.
Каска 19 деталь сложной чашеобразной формы, в которой с внутренней стороны по периметру выполнены несколько пазов (например, шесть). Пазы служат для соединения каски с вкладьш1ем„ ffa затылочной части каски выполнено отверстие для крепления держателя 21 кабеля,
Вкладыш 20 представляет собой деталь паукообразной формы, изготовленную из тонкого эластичного мате- риагта, например полиэтилена, имеющую несколько радиальных лучей с зацепами 22 на концах, число которых равно числу пазов каски.
Держатель 21 кабеля - деталь с грибовидным выступом, обеспечивающим фиксацию его в отверстии каски, и отверстием для помещения кабеля при эксплуатации.
Устройство для сборки заид- тной каски работает следующим образом.
По команде системы управления Гна фиг. 1 не показана), построенной по известной схеме,происходит последовательная подача сжатого воздуха из пневмосети на входы приводов, представляющие собой пневмоцилинд 1ы. При
3
этом привод 8 подачи вкладыша перемещает захват 9 к механизму 5 поштучной выдачи вкладышей. Захват 9, взаимодействуя с механизмом 5 поштучной вьщачи вкладышей, захватывает вкла,- дыш 20 срабатывает датчик положения (не показан), переключая сжатый воздух на второй вход привода 8 подачи вкпадыша, подвижный элемент (шток пневмоцилиндра) которого совершает движение в обратном направлении-, перемещает вкладьш 20 к устройству 2 ориентации вкладыша, при этом зацепы 22 попадают в пазы направляющих 17 и скользят по ним, отклоняя собачку 15 упираются в ограничители 18, которые препятствуют дальнейшему продвижению зацепов, останавливая их под нижней плоскостью собачек; захват 9 под действием усилия, развиваемого при- .водом, освобождает вкладьш и проходит в исходное положение. Ориентированный вкладьш зависает в устройст- ве 2.
Одновременно с началом работы привода 8 подачи вкладьша по команде системы управления включается привод 10 подачи каски, например промьшлен- ный робот, на подвижном элементе которого (руке) закреплен захват 11, в корпусе которого выполнено чашеобразное гнездо. Подвижный элемент пе- ремеш;ает схват к механизму 12 поштучной вьщачи касок, который при взаимодействии с захватом 11 освобождает каску, она выпадает в чашеобразное гнездо, при этом срабатывает датчик (не.показан), включая сигнал на перемещение захвата 11 под устройство ориентации вкладыша. После фиксации захвата 11 под устройством ориентаци вкладыша датчик положения захвата (н показан) дает сигнал подачи сжатого воздуха,на входы приводом 4 (пневмо- цилиндров) запрессовки вкладыша и запрессовки 7 держателя кабеля, при этом подвижный элемент (шток) привода 4 запрессовки вкладыша передает
944
усилие, развиваемое приводом, через шпильки, установленные на рычаг о 3, подпружиненным штокам 14 устройства 2 ориентации вкладьша, собачки 15 перемещают зацепы по направляющим, преодолевая сопротивление ограничителей, запрессовывают зацепы в пазы каски. Одновременно подвюкный элемент привода 7 (пневмоцилиндра) запрессовки держателя кабеля захватывает из механизма 6 поштучной выдачи держателей кабеля держатель 21 кабеля и запрессовывают его в отверстие каски. Крайние положения подвижных элементов приводов фиксируются датчиками положения (не показаны), которые дают сигнал в систему управления об окончании операции запрессовки вкладьш1а 20 и держателя 21 кабеля в каску. После этого система управления подает сигнал на возвращение всех элементов в исходное положение. При этом по программе схема управления промышленным роботом после выхода захвата 11 из зоны запрессовки дает команду на ротацию руки на 180 , собранная каска выпадает по направляющей в бункер (не показан). Затем захват занимает исходное положение, устройство готово для выполнения сборки очередной каски. Исходное положение фиксируется датчиками положения, сигналы которых поступают в систему управления, подающую команду на новый цикл сборки.
Введение устройства ориентации вкладьш1а, состоящее из отдельных однотипных узлов, расширяет область применения предлагаемого устройства, так как позволяет производить сборку каски с эластичным вкладышем, имеющим любое число зацепов.
Наличие в предлагаемом устройстве механизмов поштучной выдачи, подачи и запрессовки деталей каски,конструкция узла устройства ориентации вкла- дьшза позволяет автоматизировать процесс сборки, исключить ручные операции, т.е. улучшить условия труда.
74
ф(а 3
Редактор М. Циткина
Составитель Е Чистякова- Техред Я „Боккалс Корректор Е. Сирохман
Заказ 2247/14Тираж 10С1Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений к С ткрытий 113035, Москва, Ж-ЗЗ, Раутяская наб,,, д. 4/5
Производственно-полиграфическое предгриятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической сборки плавких предохранителей | 1987 |
|
SU1467598A1 |
| Автомат для сборки запрессовкой ушковых пуговиц | 1987 |
|
SU1500461A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для автоматической сборки плавких предохранителей | 1977 |
|
SU681475A1 |
| Электродное коаксиальное устройство | 1980 |
|
SU839120A1 |
| Устройство для укладки деталей | 1983 |
|
SU1186336A1 |
| Устройство для обработки давлением и сборки сетчатых деталей,преимущественно секций масляных фильтров | 1983 |
|
SU1094717A1 |
| Устройство для снятия заусенцев с вкладышей подшипников скольжения и очистки их наружной поверхности | 1985 |
|
SU1297994A1 |
| Герметичный токоввод в кварцевую колбу лампы | 1984 |
|
SU1356039A1 |
| Насадка сопла | 1986 |
|
SU1409420A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Солесос | 1922 |
|
SU29A1 |
