(54) СХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1978 |
|
SU770787A1 |
| Схват манипулятора | 1985 |
|
SU1268403A1 |
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Схват манипулятора | 1981 |
|
SU960008A1 |
| Схват манипулятора | 1983 |
|
SU1098792A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Схват манипулятора | 1982 |
|
SU1016156A1 |
| Схват промышленного робота | 1983 |
|
SU1085810A1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| Схват манипулятора | 1990 |
|
SU1785896A1 |
1
Изобретение относится к машиностроению, а именно к схватам манипуляторов для выполнения подъемно-транспортных и основных технологических операций с грузами различной формы.
По основному авт. св. № 770787 известен схват манипулятора, содержащий корпус, привод перемещения губок, губки с выполненным в каждой из них по меньшей мере одним рядом отверстий, в которых с возможностью перемещения смонтированы подпружиненные рабочие стержни, взаимодействующие с удерживаемым грузом. Кроме того, он снабжен расположенными через один между рабочими стержнями неподвижными . дополнительными стержнями и гибким нерастяжимым элементом, концы которого прикреплены к губке, причем концы рабочих и дополнительных стержней контактируют с гибким нерастяжимым элементом 1.
Такой схват способен работать с предметами различной формы, однако при его применении система управления манипулятора не получает сигналов, по которым она могла бы судить о форме этих предметов.
что сужает эксплуатационные возможности манипулятора.
Цель изобретения - автоматическое распознавание формы захватываемого предмета.
5Указанная цель достигается тем, что рабочие стержни снабжены пластинами, в каждой из которых выполнен ряд отверстий, расположенных вдоль пластины на длине, равной полному ходу рабочего стержня, а
,Q две прорези, каждая длиной, равной половине полного хода этого стержня, расположены по краям пластины, при этом с одной стороны каждой пластины установлены по меньщей мере три источника светового излучения, а с противоположной - соответст15 вующее число фоторезисторов.
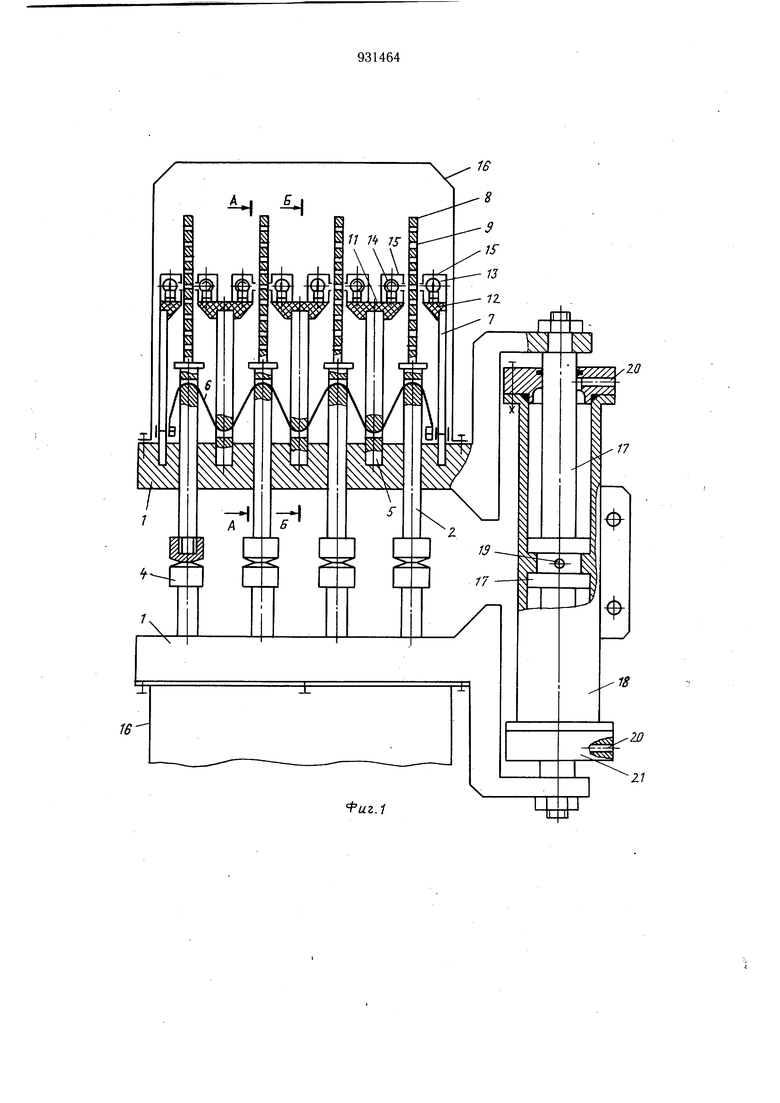
На фиг. 1 показан схват манипулятора,
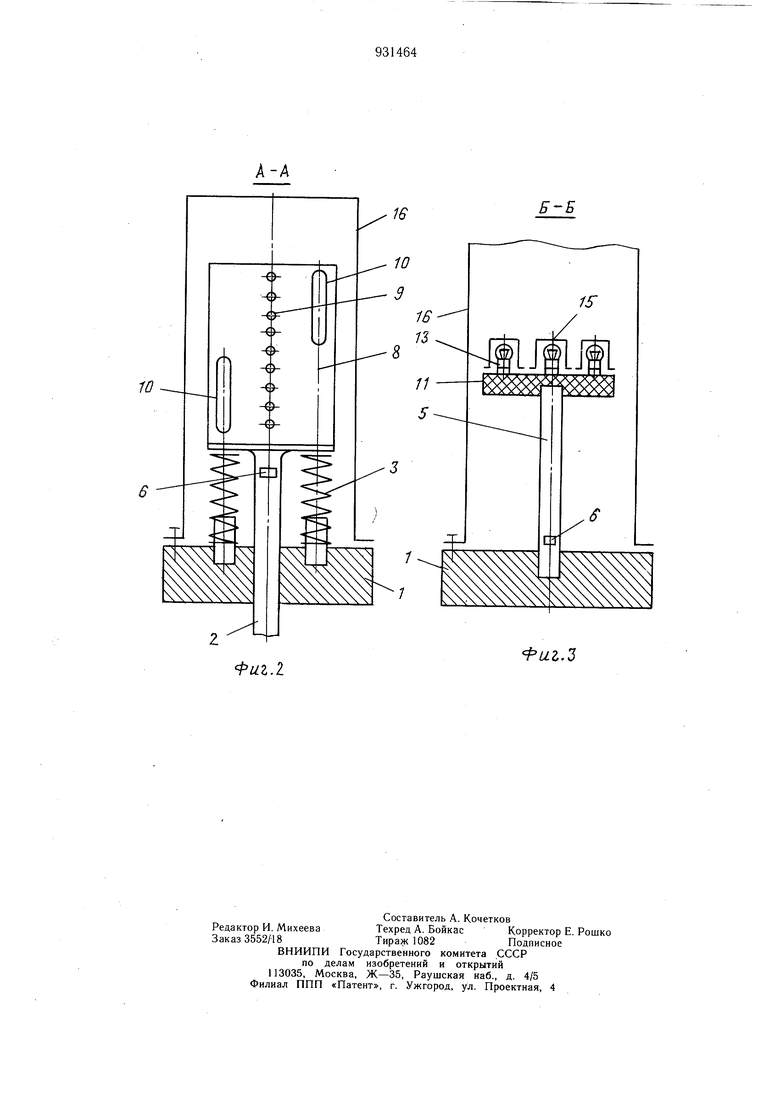
общий вид; на фиг. 2 - разрез А-А на
фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Схват имеет губки 1 (фиг. 1), в которых
2Q выполнены отверстия с размещенными в них рабочими стержнями 2, подпружиненные пружинами 3 (фиг. 2). Стержни 2 имеют наконечники 4, касающиеся захватываемого груза. В рабочих стержнях 2 и дополнительных стержнях 5, расположенных через один.
выполнены окна, в которых находится нерастяжимая и гибкая лента 6, которая поочередно пропущена через окна стержней 2 и стержней 5, а концы ее закреплены на стойках 7, в свою очередь, скрепленных с губками 1. Рабочие стержни 2 на концах, противоположных рабочей зоне, имеют пластины 8, в которых выполнены отверстия 9 и прорези 10.
На концах дополнительных стержней 5 и стоек 7 соответственно закреплены крон- ю штейны 11 и 12. На кронштейнах 11 расположены два ряда элементов-осветителей 13 или фоторезисторов 14 по три элемента в каждом ряду, закрытых колпачками 15, снабженных отверстиями для пропуска светового потока. На кронштейнах 12 расположено 15 по одному ряду осветителей 13, также по три прибора в каждом ряду. Ряды осветителей 13 и фоторезисторов 14 расположенытак, что их оси находятся на одной горизонтальной прямой, причем оси отверстий в колпачках 20 15 совпадают. Кроме того, ряды осветителей 13 и фоторезисторов 14 расположены по противоположным сторонам относительно пластин 8 и в средней их части.
Для предохранения системы от воздей. 25 ствия посторонних источников света уст ройство заключено в светонепроницаемый кожух 16. Губки 1 приводятся в движение с помощью силового цилиндра и крепятся к его штокам 17. Корпус 18 имеет отверстие 19 для подвода рабочей среды. Аналогичные .. отверстия 20 выполнены в крышках 21. Схват работает следующим образом.
При подаче рабочей среды к отверстию 19 губки 1 разводятся, схват подводится к предмету, затем путем подачи рабочей среды к отверстиям 20 производится сближе- 35 ние губок 1, и наконечники 4 рабочих стержней 2 вступают в соприкосновение с грузом. Стержни 2 подпружинены пружинами 3 и взаимодействуют с гибкой и нерастяжимой ентой 6, поэтому суммарная величина пути, пройденного рабочими стержнями 2 од- ной губки 1 от нейтрального положения в стороне захватываемого предмета, равна суммарной величине пути, пройденного этими же стержнями в сторону, противоположную предмету. При этом лента 6 скользит по j выпуклым поверхностям окон стержней 2 и 5.
При перемещении рабочих стержней 2 получают движение и скрепленные с ними ластины 8. Отверстия 9 в этих пластинах, ересекая световой поток осветителей 13, выывают появление электрических импульсов 50 а выходе фоторезисторов 14. При этом оличество импульсов пропорционально веичине пути, пройденного рабочим стержем 2 и скрепленной с ним пластиной 8. виду того, что в исходном положении (фиг. 1) оси световых пучков осветителей
13 расположены посередине пластины 9, импульсы возникают как при движении вверх, так и вниз. Поэтому система управления должна различать и направление движения. С этой целью в пластинах 8 выполнены две прорези 10 (фиг. 2), расположенные так, что одна из них находится выще, а вторая ниже центрального отверстия 9 в пластине 8. При перемещении пластины 8 вниз одновременно с пропаданием тока в центральном фоторезисторе 14 возникает ток в резисторе, связанном с правым окном 10 (фиг. 2). При этом включается реле, связанное со счетчиком числа импульсов перемещения вниз. Соответственно, при перемещении пластины 8 вверх открывается левое окно (фиг. 2), связанное с реле, включающим счетчик числа импульсов перемещения вверх.
Такие реле и счетчики связаны электрически с группой фоторезисторов 14, обслуживающих каждую из пластин 8. Поэтому система управления знает как расстояние, пройденное стержнем 2 по числу импульсов (соответствующему числу отверстий 9, пересекающих световой поток), так и направление перемещения по тому, какое (левое или правое) окно открывается в пластине 8. Суммируя перемещения всех рабочих стержней 8, система управления получает информацию о форме захватываемого груза.
Световое излучение в необходимых случаях может быть заменено на другие виды излучения, при этом пластины 8 могут быть выполнены из материала с переменной проницаемостью для данного типа излучения.
Предлагаемый схват может быть использован в составе манипулятора для сортировки деталей различной формы с последующей укладкой каждого вида в свой контейнер.
Формула изобретения
Схват манипулятора по авт. св. № 77078.7, отличающийся тем, что, с целью автоматического распознавания формы захватываемого предмета, рабочие стержни снабжены пластинами, в каждой из которых выполнен ряд отверстий, расположенных вдоль пластины на длине, равной полному-ходу рабочего стержня, а две прорези, каждая длиной, равной половине полного хода этого стержня, расположены по краям пластины, при этом с одной стороны каждой пластины установлены по меньшей мере три источника светового излучения, а с противоположной - (Соответствующее число фоторезисторов.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 770787, кл. В 25 J 15/00, 1978.
iuz.l Фиг.2. Б-Б we.J
