11
Изобретение относится к неразрушающим методам контроля и может быть использовано для автоматизированного контроля изделий сложной формы.
Цель изобретения - новышение досто верности контроля за Счет обеспечения координатного сканирования поверхности изделий сложной формы.
На чертеже показано устройство для контроля изделий сложной формы,
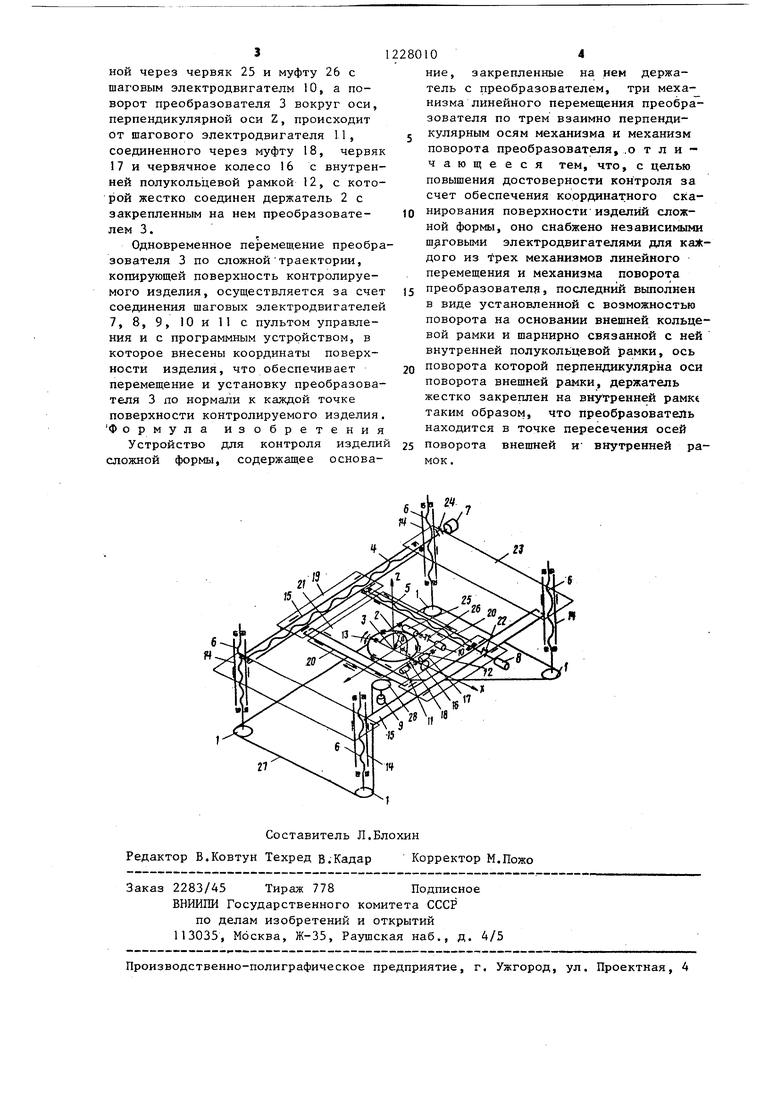
Устройство для контроля изделий сложной формы содержит основание 1, закрепленные на нем держатель 2 с преобразователем 3, три механизма линейного перемещения преобразователя 3 по трем взаимно перпендикулярным осям, включеющее механизм 4 продольного перемещения, механизм 5 поперечного перемещения и механизм 6 вертикального перемещения преобразователя 3, механизм поворота преобразователя 3, независимые шаговые элеткродвига- тели, включающие в себя шаговый электродвигатель 7 механизма 4 продольного перемещения преобразователя 3, ша- говый электродвигатель 8 механизма 5 поперечного перемещения, шаговый электродвигатель 9 механизма 6 вертикального перемещения преобразователя 3, шаговый электродвигатель 10 пово- рота преобразователя 3 вокруг нор- мапьной к основанию оси Z и шаговый электродвигатель 1 поворота преобразователя 3 вокруг любой оси, перпендикулярной оси Z, Механизм поворота преобразователя 3 выполнен в виде установленной с возможностью поворота на основании I внещней кольцевой рамки 12 и шарнирно связанной с ней внетренней полукольцевой рамки 13, держатель 2 жестко закреплен на внутренней рамке так, что преобразователь 3 находится в точке пересечения осей поворота внешней 12 и внутренней 13 рамок.
Кроме того, устройство для контроля изделий сложной формы содержит стойки 14, соединенные с ними продольные направляющие 15, червячное колесо 16, червяк 17 и муфту 18 для кинематического соединеня внешней кольцевой рамки 12 с шаговым электродвигателем 10, установленную на продольных направляющих 5 продольную каретку 19 с размещенным на ней поперечными нaпpaвляюuш - и 20, установленную на поперечных насфавляющия поперечную каретку 21, муфту 22,
10J
соединяющую механизм 5 поперечного перемещения с шаговым электродвигателем 8, вертикальную каретку 23, соединенную с механизмом 6 вертикального перемещения, муфту 24 механизма 4 продольного перемещения, червяк 25 и муфту 26 для соединения внешней кольцевой рамки 12 с шаговым электродвигателем 10 поворота преобразователя 3 вокруг оси Z и стальную перфорированную замкнутую ленту 27, соединяющую шкив 28 с механизмом 6 вертикального перемещения.
Устройство для контроля изделий сложной формы работает следующим образом.
Перед началом контроля контролируемое изделие (не показано) устанавливается на основание 1, после чего к произвольной точке его поверхности подводится преобразователь 3, закрепленный на держателе 2. Для этогс включают в произвольной последовательности или одновремнно шаговый электродвига тель 9 механизма 6 вертикального перемещения, шаговый электродвигатель 7 механизма продольного перемещения, шаговый электродвигатель В механизма 5 поперечного перемещения, шаговый электродвигатель 10 поворота преобразователя 3 вокруг оси Z и шаговый электродвигатель 11 поворота преобразователя 3 вокруг произвольной оси, перпендикулярной оси Z. При этом вертикальное перемещение преобразователя 3 осуществляется за счет вращения механизма 6.вертикального перемещения, связанного стальной перфорированной замкнутой лентой 27 со шкивом 28, и подъема соединенной со стойками 14 вертикальной каретки 23. Продольное перемещение преобразователя 3 осуществляется за сче перемещения по продольным направляющим 15 установленной на них продольной каретки 9, соединенной с механизмом 4 продольного перемещения и через муфту 24 с шаговым электродвигателем 7.. Псгперечное перемещение преобразователя 3 осуществляется перемещением поперечной каретки 21, соединенной муфтой 22 с шаговым электродвигателем 8,по поперечным направляющим 20 путем вращения механизма 5 поперечного перемещения.
Поворот преобразователя 3 вокруг оси Z происходит за счет вращения внешней кольцевой рамки I2, соединен31
ной через червяк 25 и муфту 26 с шаговым электродвигателм 10, а поворот преобразователя 3 вокруг оси, перпендикулярной оси Z, происходит от шагового электродвигателя 11, соединенного через муфту 18, червяк 17 и червячное колесо 16 с внутренней полукольцевой рамкой 12, с которой жестко соединен держатель 2 с закрепленным на нем преобразовате- лем 3.
Одновременное перемещение преобразователя 3 по сложной траектории, копирующей поверхность контролируемого изделия, осуществляется за счет соединения шаговых электродвигателей 7, 8, 9, 0и 11 с пультом управления и с программным устройством, в которое внесены координаты поверхности изделия, что обеспечивает перемеш;ение и установку преобразователя 3 по нормали к каждой точке поверхности контролируемого изделия. Формула изобретения
Устройство для контроля изделий сложной формы, содержащее основа104
ние, закрепленные на нем держатель с преобразователем, три меха- низма линейного перемещения преобразователя по трем взаимно перпендикулярным осям механизма и механизм поворота преобразователя,.о т л и - чающееся тем, что, с целью повышения достоверности контроля за счет обеспечения координатного сканирования поверхности изделий сложной формы, оно снабжено независимыми шаговыми электродвигателями для каждого из трех механизмов линейного перемещения и механизма поворота преобразователя, последний выполнен в виде установленной с возможностью поворота на основании внешней кольцевой рамки и шарнирно связанной с ней внутренней полукольцевой рамки, ось поворота которой перпендикулярна оси поворота внешней рамки, держатель жестко закреплен на внутренней рамк таким образом, что преобразователь находится в точке пересечения осей поворота внешней и внутренней рамок.
27
Составитель Л.Блохин Редактор В.Ковтун Техред в.Кадар Корректор М.Пожо
Заказ 2283/45 Тираж 778 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для ультразвукового контроля изделий | 1987 |
|
SU1557515A1 |
| Устройство для автоматической сварки криволинейных элементов | 1982 |
|
SU1041252A1 |
| Рабочая клеть профилегибочного стана | 1986 |
|
SU1400708A1 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| Установка для ультразвукового контроля изделий | 1986 |
|
SU1538114A1 |
| Электроэрозионный вырезной станок с числовым программным управлением | 1980 |
|
SU948596A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СВАРКИ ТИТАНОВЫХ СПЛАВОВ В КАМЕРЕ С КОНТРОЛИРУЕМОЙ АТМОСФЕРОЙ | 2020 |
|
RU2746506C1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ | 2014 |
|
RU2570353C1 |
| 3D-ПРИНТЕР | 2017 |
|
RU2649738C1 |
Изобретение относится к неразрушающим методам контроля изделий сложной формы. Цель изобретения - по- вьшение достоверности контроля за счет обеспечения координатного сканирования поверхности изделий сложной формы. Устройство содержит закрепленный на основании держатель с преобразователем и связанные с последним три механизма линейного перемещения преобразователя по трем взаимно перпендикулярным осям, каждый из которых связан с независимым шаговым электродвигателем, и механизм поворота преобразователя, также связанный с независимым шаговым электродвигателем и выполненный в виде установленной с возможностью поворота на основании внешней кольцевой рамки и шарнирно связанной с ней внутренней полукольцевой рамки, ось поворота которой перпендикулярна оси поворота внешней рамки. Держатель жестко закреплен на внутренней рамке так, что преобразователь находится в точке пересечения осей поворота обеих рамок. Шаговые электродвигатели соединены с программным устройством, обеспечивающим установку преобразователя по нормали к каждой точке поверхности изделия. 1 ил. (Л to bO оо
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
