ния векторов, два блока деления, задатчик параметра регуляриза)дии, причем выход блока памяти соединен с входом первого блока хранения векторов, выход которого соединен с первым входом первого блока перемноже-- векторов, второй вход которого соединен с выходом второго блока перемножения векторов, выход первого блока перемножения векторов соединен с первым входом первого комбнна л он- ного сумматора, второй вход которого соединен с задатчиком параметра регуляризации, а выход - с первым входом первого и второго блоков деления, второй вход первого блока деления соединен с выходом второго блока перемножения векторов, а выход - с первым входом третьего блока перемножения векторов, второй вход которого соединен с выходом второго комбинационного сумматора, выход третьего блока перемножения векторов соедине.н с первым входом первого накапливаю- .щего сумматора, второй вход которого соединен с выходом командного блока, а третий вход - с выходом блока хранения параметров, вход которого соединен с выходом первого накапливающего сумматора, второй выход блока хранения параметров соединен с входом блока oптим IзaцliИ5 а третий выход с первым входом четвертого бло1са перемножения векторов., второй вход которого соединен с выходом блока па кяти и первым входом второго блока перемнолсения векторов, выход четвертого блока перемножения векторов соединен с первым входом второго комбинационного сумматора, второй вход которого соединен с выходом блока памяти, второй вход второго блока перемножения векторов соединен с выходом блока хранения матриЩ), вход которой соединен с выходом второго накапливающего сумматора , первьй вход которого соединен с выходом командного блока, второй вход - с выходом БТО- рого блока деления, а третий вход - с выходом блока хранения матрицы, второй вход вторрго блока деления со единен с выходом пятого блока пере- мнолсения векторов, первый вход, которого соединен с выходом второго блока хранения векторов, а второй вход с входом второго блока кранения векторов и выходом второго блока перемножения векторов.
8965
4„ Система по п. 1, о т л и ч а ю- щ а я с я тем, что блок оптимизации содержит два блока хранения матриц, два блока перемножения матриц, три блока перемножения векторов,, сумматор,, блок обращения матриц, задатчик параметра регуляризации, причем первый вход первого блока хранения матриц соединен с первым выходом командного блока, второй вход - с вторым выходом командного блока, а выход - с первым входом первого блока перемножения матриц, второй вход которого соединен с выходом блока подстройки парс1метров, а выход - с первым входом второго блока перемножения матрид и первым входом первого блока перемножения векторов, первый вход второго блока перемножения векторов соединен с вькодом блока подстройки параметров , второй вход - с выходом блока : памяти,, выход второго блока перемножения векторов соединен с вторым входом первого блока перемножения векторов , выход которого соединен с первым ВХОДОМ третьего блока перемножения векторов, второй вход которого соединен с выходом блока обр ащения матриц, первый вход которого соединен с выходом командного блока, а второй вход - с выходом сумматора, первый вход которого соединен с выходом второго блока перемножения матриц, а второй вход, - с задатчиком параметра регуляризации, второй вход второго блока перемножения метриц соединен с выходом второго блока хранения матриц, а его вход - с выходом блока подстройки параметров.
5.Система по п. 1, о т л и ч а ю- щ а я с я тем, что задатчик химсостава разливаемого металла содержит задатчик 1 :ремния, задатчик серы, эа- датчик марганца, задатчик углерода, два квадратора и блок деления, причем выход задатчика кремния соединен с входом первого квадратора и входом. блока памяти, выход квадратора соединен с входом блока памяти, выходы за- датчиков серы и марганца соединены
с входами блока деления, выход которого соединен с входом блока памяти, выход задатчика углерода соединен с входом второго квадратора и входом блока памяти, выход второго квадратора соединен с входом блока памяти,
6.Система по п. 1, отличаю- 1ц а я с я тем, что блок обращения
матрицы содержит блок вычисления разности матриц, два блока вычисления векторов, три блока перемножения матриц, четыре блока хранения матриц блок хранения векторов, два управляемых вентиля, счетчик адреса, блок сравнения и блок хранения константы, причем первый вход блока вычисления разности матриц соединен с выходом сумматора, а второй вход - с выходом первого блока хранения матриц, выход блока вычисления разности матриц соединен с первым входом первого блока перемножения матриц, выход которого соединен с первым входом первого блока вычисления векторов, выход которого соединен с первь м входом . второго блока перемножения матриц, второй вход которого соединен с выходом второго блока хранения матриц, а вьгход - с первым входом второго : блока вычисления векторов и первым входом первого, управляемого вентиля, выход блока вычисления векторов соединен с входом третьего блока перемножения матриц, выход которого соединен с первым входом блока сравнения, второй вход которого соединен с .блоком хранения констант, а выход - с вторым входом первого управляемого вентиля, первый выход командного блока соединен с третьим и первым входами первого и второго управляемых вентилей и соответственно, первый выход первого управляемого вентиля соединен с первым входом блока хранения векторов, а второй выход первого управляемого венти.1гя - с первым входом третьего блока хранения матриц и первым входом счетчика адреса, второй вход которого соединен с вторым выходом командного блока, а первый выход - с вторым входом третьего блока хранения матриц и вхо дом четвертого блока хранения матриц выход третьего блока хранения матриц соединен с вторым входом второго управляемого вентиля, третий вход которого соединен с вторым выходом
счетчика адреса, а выход - с входом блока перемножения векторов, выход четвертого блока хранения матриц соединен с вторым входом блока хра-7 нения векторов и вторым входом первого блока вычисления векторов, выход блока хранения векторов соединен с вторым входом первого блока пере- ьшожения матриц и вторым входом второго блока вычисления векторов.
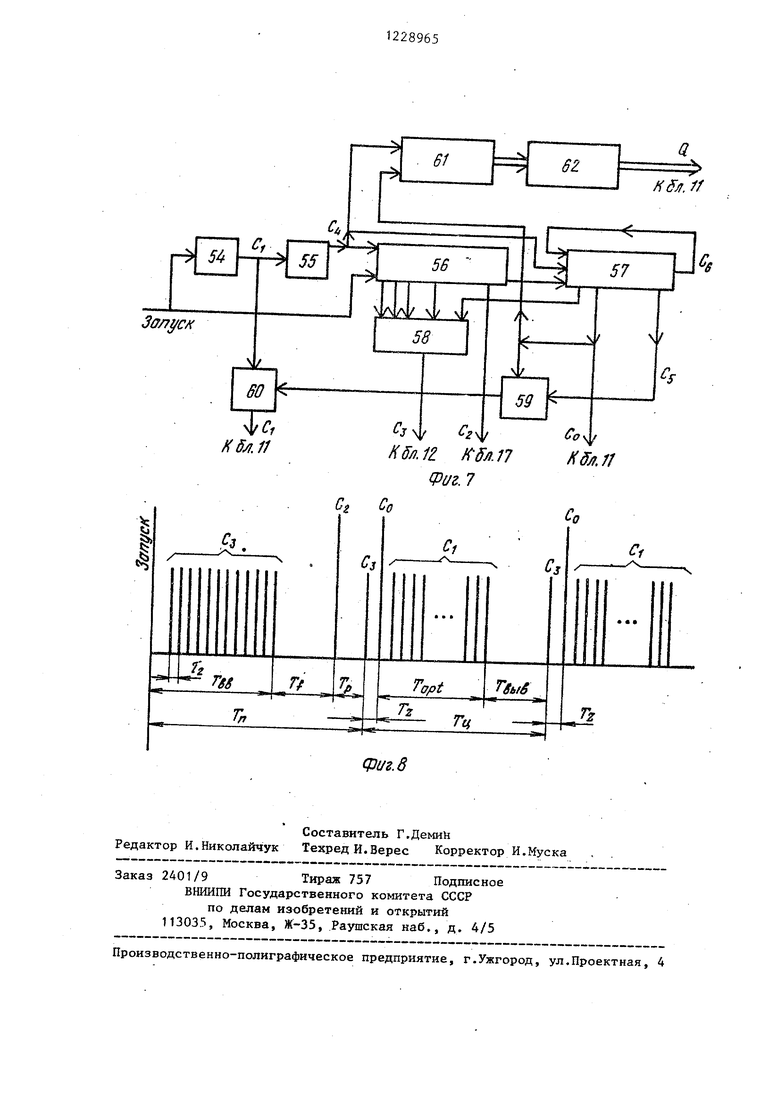
7. Система по п. 1, о т л и ч а го- щ а я с я тем, что командньш блок содержит генератор синхроимпульсов, делитель частоты, два регистра сдвига, элемент HJIIi, триггер, управляемый вентиль, счетчик адреса и блок памяти, причем сигнал Запуск соединен с первым входом первого регистра сдвига и входом генератора синхроимпульсов, выход которого соединен с первым входом управляемого вентиля и входом делителя частоты, выход которого соединен с вторым входом первого регистра сдвига, первым входом счетчик а адреса и первым входом второго регистра сдвига, выходы первого регистра сдвига соединены с входами Элемента ИЛИ и вторым входом .второго регистра сдвига, третий вход которого соединен с первым выходом второго ре гистра сдвига, второй выход которого соединен с первым входом триггера, третий выход второго регистра сдвига соединен с вторым входом триггера, входом блока оптимизации и вторым входом счетчика адреса, четвертьш выход второго регистра сдвига соединен с входом элемента ИЛИ, выход которого соединен с входом блока памяти, выход первого регистра сдвига соединен с входом блока подстройки параметров, выход триггера соединен с вторым входом управляемого вентиля, выход которого соединен с входом бло- ка оптимизации, выход счетчика адреса соединен с входом блока памяти, выход которого соединен с входом блока оптимизации.
1
122896
Изобретение относится к металлургии, а именно к непрерывному литью металлов, и может быть использовано в системах автоматического управления машинами непрерывного литья заготов- ки СМНЛЗ).
Цель изобретения - повышение качества слитка, получаемого на MILJlSj путем автоматической оптимизации значений -заданных температур в секциях вторичного охлажт;ения. .
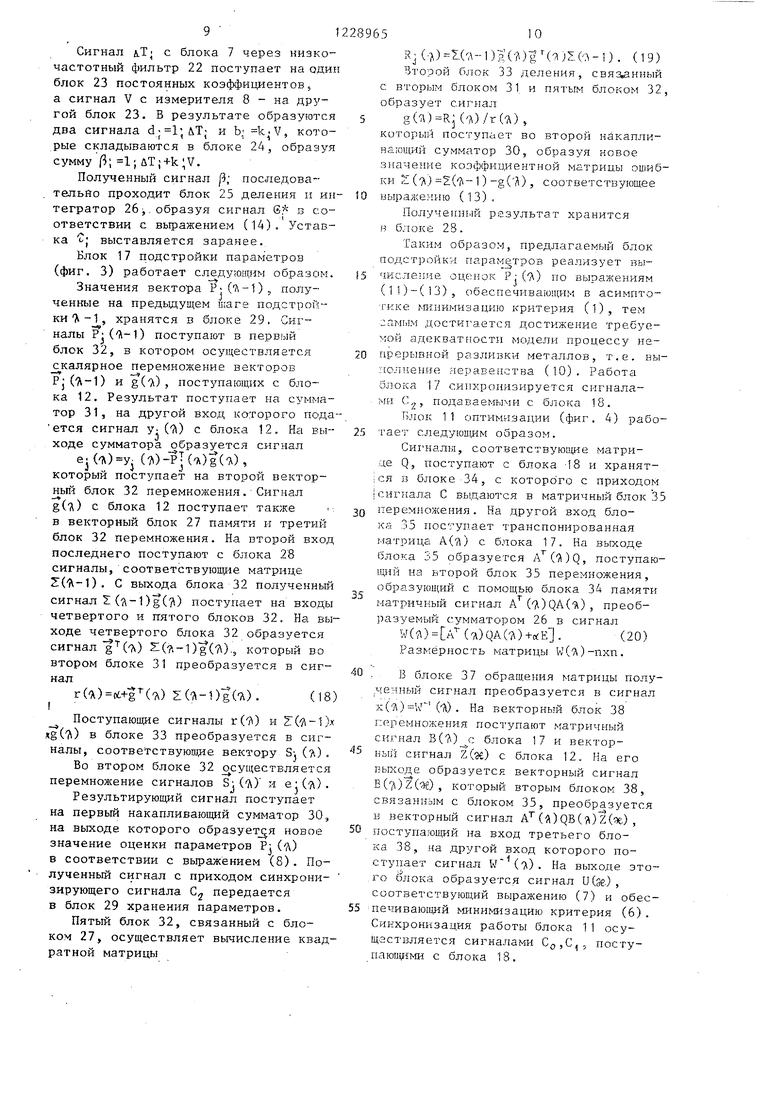
На фиг. 1 приведена структурная схема системы; на фиг. 2 - схема блока заданий расхода воды; на фиг, 3 - схема блока подстройки параметров; на фиг. 4 - схема блока оптимизации; на фиг. 5 - пример схемы задатчика химического состава раз1шваемой стали; на фиг. 6 - схема блока обращения матрицы; на фиг. 7 - схема командного блока; на фиг. 8 - временная диаграмма работы командного блока.
Система автоматического управления процессом непрерывной разливки металг ла содержит датчики 1 расхода воды, регуляторы 2 расхода воды, блоки 3 заданий расхода воды, регулирующие органы 4, трубопроводы 5 воды, измерители 6 температуры поверхности отливаемого слитка, блоки 7 сравненияs измеритель 8 скорости вытягивани51 слитка, задатчик 9 скорости вытягивания слитка, регулятор 10 скорости вытягивания слитка, блок 11 оптимиза- .ции, блок 12 памяти данных, задат- чики 13 ручного ввода температуры разливаемого металла, задатчик 14 химического состава разливаемого металла, задатчик 15 расхода воды в кристаллизаторе, задатчик 16 дефек- тов ранее отлитого слитка, блок 17 подстройки параметров, командный блок 18, неприводной ролик 19, приводные ролики 20 и блоки 21 преобразования (элементы ввода и вывода не- прерывных сигналов).
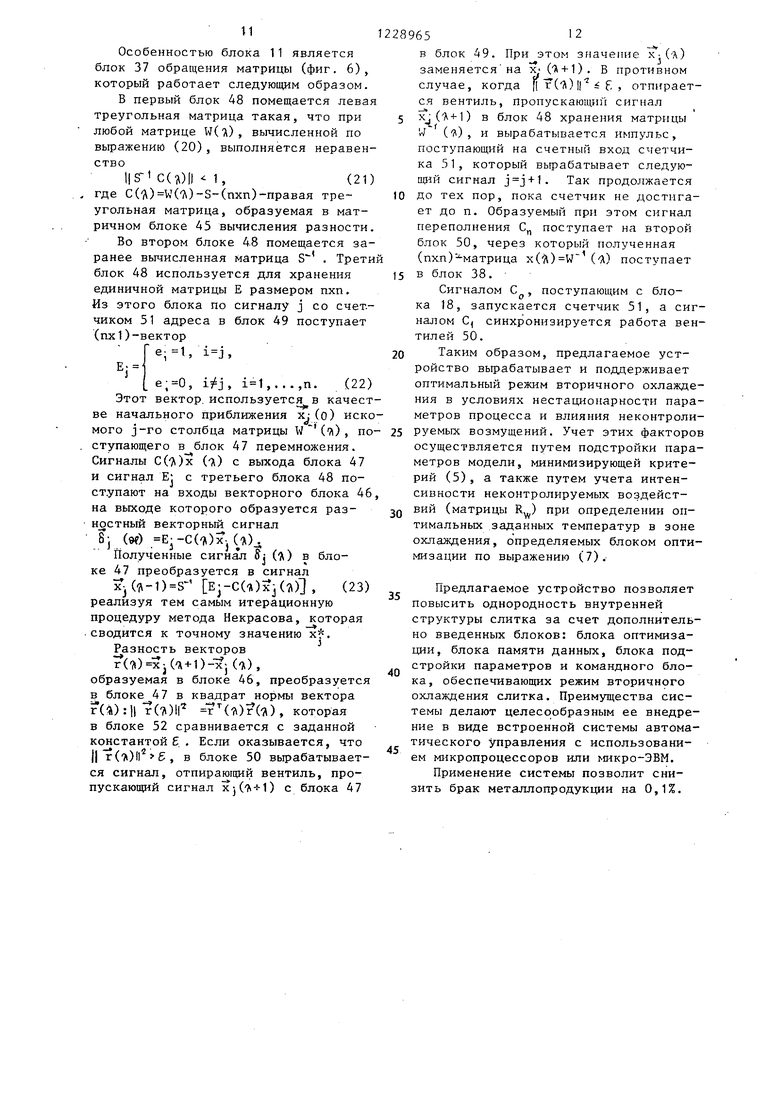
Блок 3 задания расхода воды содержит фильтр 22, блоки 23 постоянных коэффициентов, сумматор 24, блок 25 деления и интегратор 26.
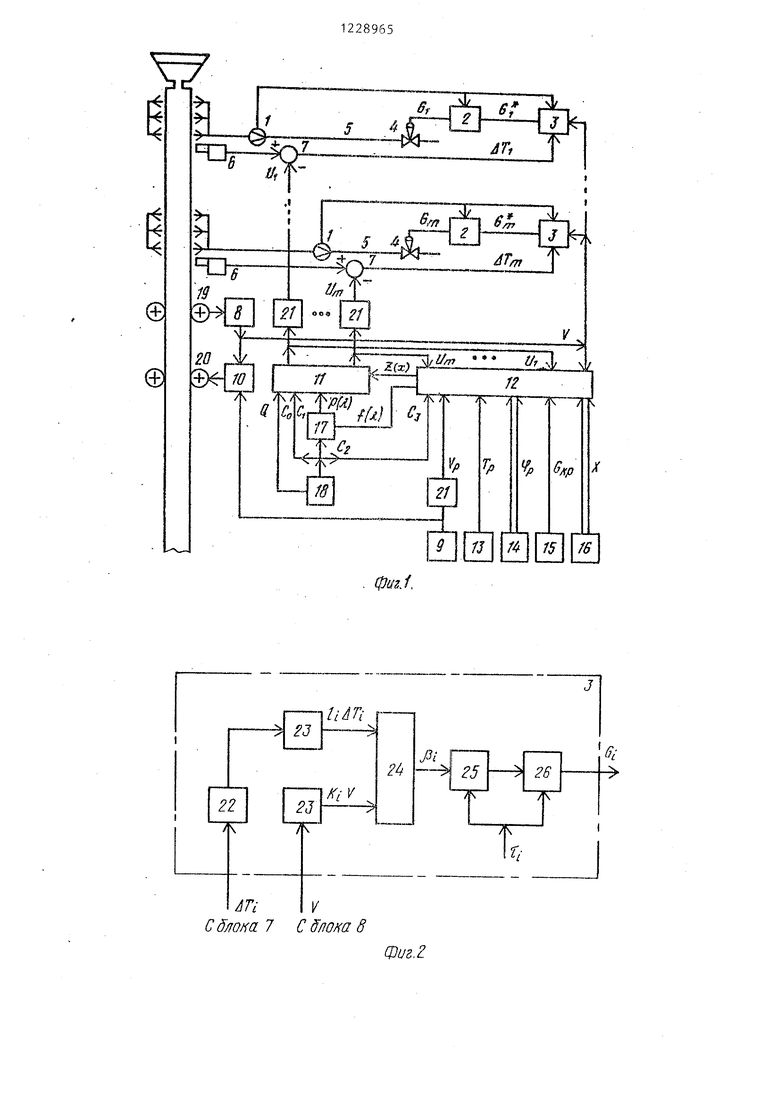
Блок 17 подстройки параметров содержит блоки 27 хранения вектора, блок 28 хранения матрищ, блок 29 хранения параметров, накапливаюпще сумматоры 30, комбинационные торы 31, блоки 32 перемножения векторов и блоки 33 деления.
2
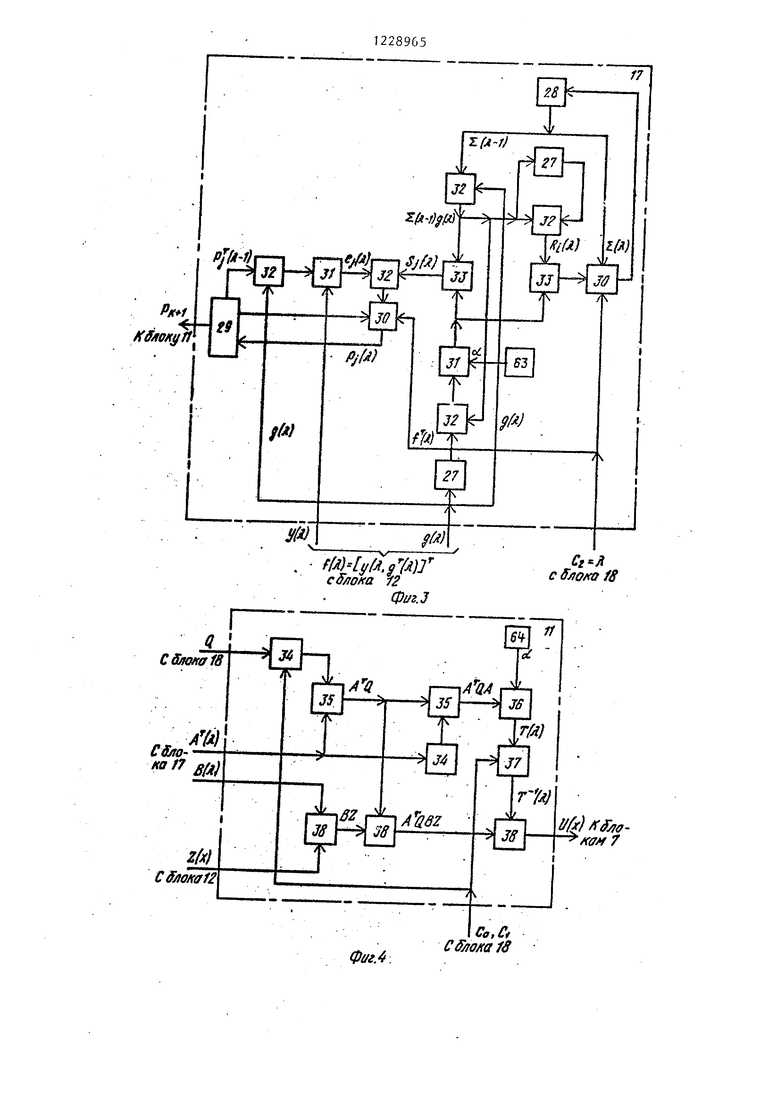
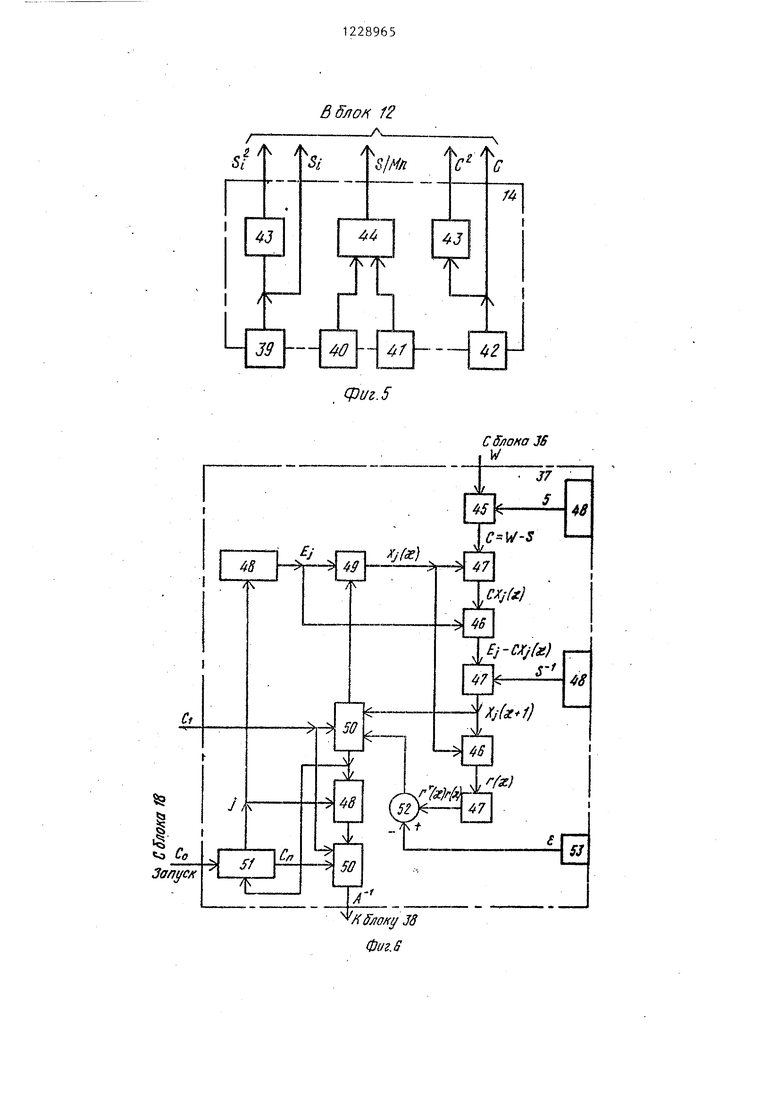
Блок 11 оптимизации содержит бло- ки 34 хранения матрицы, блоки 35 перемножения матриц, сумматор 36., блок 37 обращения матрицы и блоки 38 перемножения векторов, а задатчик 14 химического состава разливаемого металла состоит из задатчиков 39-42 ручного ввода процентного содержания соответственно кремния, серы, марганца и углерода, квадраторов 43 и блока 44 деления.
Блок 37 обращения матрицы содержит блок 45 вычисления разности, . блок ii6 вычисления векторов, блоки 47 перемножения матриц, блоки 48 хранения матриц, блок 49 хранения вектора, управляемые вентили 50, счетчик 51 адреса, блоки 52 сравнения и блок 53 хранения константы.
Бл(5к 18 - командный блок. Его на- .значение - хранение и вьщача матрицы Q з блок 11, а также синхронизация работы цифровых блоков 11,12 и 17 сигналами С;,,С, ,С и С. Блок 18 (фиг. 7) содержит генератор 54 синхроимпульсов, делитель 55 частоты, регистр 56 сдвига, кольцевой счет- ЧР1К 57, элемент ИЛИ 58 триггер 59, управляемый зентиль 60, счетчик 61 адреса и блок 62 памяти. Выработка блоком 18 синхросигналов производится в соответствии с временной диаграммой (фиг. В), на которой обозначены время Т, подготовки, время T|j цикла, время Т ввода сигналов с ручных задатчиков, время Т. формирования векторов z j. , g(,jH (я, время Т.| подстройки параметров модели, дре- мя Т коррекции значений вектора Z(x время Т |. работы блока 11 оптимиза- пин, время вывода и установления полученных оптимальных значений ид-с, ,...,га. Позициями 63 и 64 (фиг. 3 и 4) показаны задатчики параметра (ci) регуляризации.
Процесс образования дефектов слитка при непрерывной разливке металлов может быть огшсан матричным уравнением
- (-w) А («е) и (-к) -В (ae) z (эс) -bfe) , ( 1)
где y(e.)п- мерньй вектор, координаты которого определяются наиболее существенными дефектами формируемого слитка, оцениваемыми в соответствующих дискретному времени ае участках, например, в баллах по серным отпечаткам отобранных темплетов, дискретное
3
время , At - интервал квантования;
и(эс)-m-мерный вектор, координаты котортэго определяются заданными температурами С С) на выходе из соответ- ствщощей зоны вторичного охлаждения;
Z(9e)-k-MepHb ft вектор входных неуправляемых воздействий, координаты которого определяются скоростью V вытягивания слитка, температурой Тр и химическим составом Q,, жидкого металла,, расходом воды в кристаллизаторе и т,п.;
и(х)-п-мерный вектор неконтролируемых возмущающих воздействий на процесс, статистические характеристики которьк известны: ( эе)0; R,(эe)w ( at) , верхний индекс Т здесь и далее означает транспонирование вектора (матрицы);
А(х),В( Эб) - числовые матршда параметров процесса, соответственно размерностей пхт и nxk (истинные значения некоторых коэффициентов, составляющих эти матрицы, изменяются со вре-25 рия (5) идентификации.
менем из-за старения установки непрерывного литья, износа стенок кристаллизатора, тянущих валков и т.п.).
Качество процесса формирования не- прерывнолитого слитка наиболее полно можно характеризовать критерием
j(y)()Qy(7e) , (2) где Q-(nxn) - весовая матрица.
Для определенности рассмотрим в дальнейшем процесс формирования прямоугольного стального слитка на МНЛЗ при , , . Причем компонентами вектора у являются у, - внутренние трещины, перпендикулярные широким граням; у - осевые трещины; Уд - осевая рыхлость; у - внутренние трещины и ликвационные полоски, пер- пендикулярные узким граням. Компонентами вектора Z при непрерывной разивке стали являются У,Тр, и 5-мерный вектор, имеющий вид
,Si2 ,S/Mn,C, , (3) где Si,S,Mn,C - процентные содержания соответственно кремния, серы, марганца, углерода.
Компоненты вектора W( 3e) (х), ,...,4J имеют нулевые средние и конечные дисперсии б. ,,...,4, составляющие диагональную матрицу R.
Неучет нестационарности реального роцесса вследствие изменения его араметров А( «) и В( «), неонтролируемых воздействий W( 3C) яв-
12289654
ляется основной причиной неэффективности в реальных условиях известных устройств управления. Кроме того.
выбор заданных температур (вектора и(е)) из условия минимизации какой- либо одной переменной У е у также не позволяет существенно улучшить качество слитка в отношении критерия (2). Вектор оптимальных значений задан- ных температур в сек1Ц1ях вторичного охлаждения определяется из условия обеспечения минимума критерия (2) с пдмощью модели
XW А(-эе)и (-эс) -ВМ г(г) , (4) адекватность которой реаль)юму процессу обеспечивается подстройкой параметров модели A(flc) и В(эс), минимизирующей критерий
(х(«)-у()) R(x(«.)-y(-)), (5)
где x()-п-мерный вектор выходн1.1Х переменных модели, физический смысл которых соответствует переменным вектора y( 5f) ;
R - (пхп)-весовая матрица крите
Оптимизация значений заданных температур в секциях вторичного охлаждения, обеспечивающая минимум критерия (2), осуществляется.путем определения оптимальных значений вектора ) по критерию
J(-«)M()QX()} (6)
с помощью модели (4), адекватной реальному процессу. Такие значения вектора и(з) определяются в соответ- ствш с теорией оптимизации.
шЧ) А (зе)дА(э€)()дв(-)х
xZ(af).(7)
Параметры модели (матрицы А(эй) и В(э{.) подстраиваются вместе. Для зтого они составлены в матрицу
P(3€) A(3e):B( Jt) ,(8)
размерность которой для рассматриваемого случая
nx(m+k)4x13.(9)
Адекватность .модели (4) реальному процессу (1) достигается периодической подстройкой матрицы Р(), обеспечивающей миним11зацию критерия (5) до выполнения неравенства
Ь5; О,(10)
где - принятая величина,характеризующая допустимую ошибку модели. Такая подстройка в предлагаемой системе осуществляется следующей ре
1курдентнод процед 5 зой:
. ( A)P(()+S.(л)tYj(-л) - -P7(-A-1)gCft) ; Pj(o)-Pj, ;(
11)
Sj ()l( V)f()/ o6+gV)I(() ; , )
Z( A) (-1)-Z() g()g (fl)Z(-1)/ . +g 4 )E ( Д -1 )l(fl Я ; Z (0) 2,
(13 де Д й/л С - дискретное время;
UC - период подстройки пара- . метров;
С-л) - вектор входов модели (4) 21() - корреляционная матрица ошибки оценки параметров j (-Л);
P () .- вектор, представляюищй собой j-ю строку матрицы Т ( Л); Y-( Д) - значение j-ro дефекта
последнего слитка; Р - начальное значение вектора Р;(Л); Z Q - начальное значение мат- .
рицы( Л);
(у - параметр регуляризахщи, введение которого обеспечивает устойчивость процесса оценивания к ошибкам данных pie О, lj В соответствии с теорией идентификации подстройка по выражениям (11)- (13) обеспечивает минимизацию критерия (1) и с течением времени выполнение неравенства (10).
Таким образом, предлагаемая система обладает свойствами, не совпадающими со свойствами известных решений, а именно: оптимальность режима вторичного охлаждения отливаемого слитка по критерию (2) и отслеживание его при изменениях параметров установки и влияниях неконтролируемых Bost-rj e- ний. Эти свойства обеспечиваются выработкой значений заданных температур в секциях охлаждения, соответствующих вьфажению (7), минимизирующему критерий (6), т.е. суммарный показатель дефектов слитка; подстройкой параметров модели (4), минимизирующей критерий (5) и обеспечивающей тем самым соответствие критериев (2) и (6), отслеживание изменения пара- метров МШ13 и неконтролируемых воздействий соответствующими изменениями параметров модели A(7i) и В( л) и, вследствие этого, изменениями параметров закона управления (7); учетом статистических характеристик (матрицы Ry неконтролируемых возмущений при выработке управлений и( Эе).
5
5
5
0
0
Система реализуется устройством, которое работает следующим образом.
Перед началом процесса разливки оператор устанавливает задатчики 9 и 13 - 16 в соответствующее положение. Одновременно с началом разливки запускается блок 18. На выходе всех задатчиков образуются цифровые сигналы, коды которых отражают величины соответственно скорости вытягивания слитка V, температуры жидкого металла Тр, процентного содержания химических элементов в жидком металле (хи; снческий состав |р), расхода воды в кристаллизатор G, и показателей дефектов х предыдущего слитка, оцениваемых в баллах.
Режим охлаждения слитка определяется расходами воды G, ,6, . . ,Gr, в зонах вторичного охлаждения, задаваемым блоками 3 и поддерживаемыми на заданном уровне регуляторами 2 с помощью датчиков 1 и регу- . лирующнх органов 4.
Задания , . .. ,G определяются блоками 3 в соответствии с зависимостью I l;uT- +k;V)dt; ,. . . ,m, (I(14)
где ДТ; Т;-и;;
Т; - измеренные пирометрами 6 . значения температуры поверхности слитка в i-й зоне вторичного охлаждения ; U| - заданные значения этих
температур, определяемые блоком 11;
- время, по истечении которого i-я секция оказывается заполненной металлом при заданной скорости V вытягивания слитка; 1; ,kj - числовые коэффициенты.
Интегральная зависимость (14) исключает скачкообразный характер изменения задания С при изменении й Г; ИЛИ V И тем самым возможность возникновения недопустимых температурных напряжений, способных привести к нарушениям внутренней структуры отливаемого слитка.
Регуляторы 2 вырабатывают сигналы
(G;-G)dt; ,, .. ,m, (15)
° управляющие работой регулируклцих
органов 4, установленных в трубопро.7
водах воды на секции вторичного охлаждения.
Задатчик 9, кроме цифрового выхода, имеет аналоговый, который через регулятор 10 скорости и проводные ролики 20 устанавливает заданную скорость VP вытягивания слитка. Измеритель 8 с помощью неприводного ролика 19 определяет действительную скорость V вытягивания слитка, которая поступает в блоки 3 и через блок 21 преобразования, который в этом случае работает в режиме аналого-цифрового преобразователя, в блок 12 памяти.
В блоке 12 памяти хранится матрица наблюдений F размером 2N х(т+3+ +1+п). При этом N tp/At, где tp - время формирования слитка (время разливки); At - период съема сигналов и записи их в блок 12; 1 - размерность вектора q , Так, при разливке стали при , , матрица F имеет размерность 2N х17.
Интервал ut выбирается в зависимости от характера изменений скорости V и обычно находится в пределах 30 180 с. Матрица F имеет вид . и(1), ), О
и (2), Z(2) (16)
U(N ), ) у() . (N +t), z (), О и(N +2), Z(N +2),
U(«), Z(9t), О
U:(2N ), Z(2N ),1(-H), где О - нулевой вектор размером Кх1.
В блоке 1,2, кроме того, из матрицы F образуется вектор
g(7) U( A), Z),
где и, ()4rZU, (ge), ,...,m; 1 -/«I
Z; ( A)4r Z-(9e), j 1,...,n+3+m.
J )ti -
При этом вектор g() поступает в блок 17, а вектор Z(эе),-зе6 l,N значения элементов которого поступаю соответственно с измерителя 8, задат чиков 13 - 15 и хранятся в ячейках блока 12 с номерами (-1)N ,...,N , поступает в блок 11.
Блок 11 определяет оптимальные по критерию (6) значения заданий температуры поверхности слитка U, (че) , U(fle) по выражению (7). При этом при
289658
определении U, (х) ,. . . .) для каждого моме«та яс учитывается состояние процесса Z( X,) в данный момент. Цифровые сигналы и («), получаемые в бло- 5 ке 11, преобразуются в аналоговые блоками 21.
Оптимальность полученных заданий и() по критершо (2) обеспечивается поддержанием необходимой степени аде10 кватности модели (4) и реального процесса (1). Эту задачу решает блок 17 путем подстройки параметров модели (4), т.е. числовых значений матриц A{f() и В(7л) на основе обработки
t5 накопленной ииформахуш, хрггнящейся в блоке 12. При этом NjaTniuia Л( Х) и В(-Л) объединены в матрицу P() Л( Л): B()J , имеющую размерность при указанных ранее значениях n,m,l
20 4x13. Подстройка параметров осуществляется циклически с числом циклов, равным п (в данном случае, равным 4), по строке за цикл. При этом строка PJ ) матрицы Р() хранится в виде
25 вектора размерностью 13x1. Подстрой- ка векторов Pj (-i) осуществляется по выражениям (11)-(13) причем с блока 12 в блок 17 поступает вектор Г(л)уи) , §( Л) , где 13-мерный
30 вектор §() образован из матрицы F следующим образом
g( A)U(N ), Г( ЛК ) , (17) Командный блок 18 синхронизирует работу цифровых блоков 11, 12 и 17 сигналами Со,С,,С2 и Сз.
Аналоговые блоки 2,3,7,8 и 10 реализованы регулирующими и функциональными приборами АКЭСР. Ручные задатчики 13 - 16,блоки 21 преобразо- 40 вания и цифровые блоки 9,11,12 и 17 реализованы с помощью КТС ЛИУС-2. При этом подсистема, реализованная на КТС ЛИУС-2,работает в супервизорном режиме.
« ,
Таким образом, повышение качества
слитка достигается оптимизацией режима вторичного охлаждения, минимизи- .. рующей критерий (2) путем определения
50 оптимальных температур поверхности слитка 1) ,... ,Uf блоком 11 с помощью модели (4), адекватность которой реальному процессу обеспечивается блоком 17 по информации, хранимой
5 в блоке 12.
Блок 3 заданий расхода воды в сек- ции охлаждения (фиг. 2) работает следующим образом.
9 1
Сигнал A.TJ с блока 7 через низкочастотный фильтр 22 поступает на один блок 23 постоянных коэффициентов, а сигнал V с измерителя 8 - на другой блок 23, В результате образуются два сигнала d; l;&T; и Ь.; , которые складываются в блоке 24, образуя cyMMy fJ; l;uT;-fk;V.
Полученный сигнал ; последова-- тельйо проходит блок 25 деления н интегратор 26;,, образуя сигнал S в соответствии с выражением (14). Уставка выставляется заранее.
Блок 17 подстройки параметров (фиг. 3) работает следующим образом.
Значения вектора P;(), полу ется сигнал у-(Ti) с ходе сумматора образуется
вектора Р; () ., ченные на предыдущем шаге подстройки -l, хранятся в блоке 29. Сигналы P ( A-I) поступают в первый блок 32, в котором осуществляется скалярное перемножение векторов Р( Л-1) и g(), поступающих с блока 12. Результат поступает на сумматор 31, на другой вход которого пода блока 12. На выси г нал
е.( Л)у ( i)-pT()g(), который поступает на второй вектор- ньш блок 32 перемножения. Сигнал g( A) с блока 12 поступает также в векторный блок 27 памяти и третий блок 32 перемножения. На второй вход последнего поступают с блока 28 сигналы, соответствующие матрице ( Л-1). С выхода блока 32 полученный сигнал 21 (-1 )(-/) поступает на входы четвертого и пятого блоков 32„ На выходе четвертого блока 32 образуется сигнал (.., который во втором блоке 31 преобразуется в сигнал
r( A)ci+g( A) Z(--) g(7i). (18 I
Поступающие сигналы г() и 2() )i(g() в блоке 33 преобразуется в сигналы, соответствующие вектору S-. (/) ,
Во втором блоке 32 осуществляется перемножение сигналов S; ( Л) и
е ( Л).
Результирующий сигнаг поступает на первый накапливающий сумматор 30, на выходе которого образует я новое значение оценки параметров Р; (-д) в соответствии с выражением (8). Полученный сигнал с приходом синхронизирующего сигнала Cj передается в блок 29 хранения параметров.
Пятый блок 32, связанный с блоком 27, осуществляет вычисление квадратной матрицы
10
Rj( -;)()(o-i). (19)
Второй блок 33 деления, связанный с BTopisiM блоком 31, и пятым блоком 32, образует сигнал
g( ;)Rj ( A)/r() ,
который поступает во второй накапливающий сумматор 30, образуя новое значеине кoэффиu eнтнoй матрицы ошибки Z (-.) 2:()-g(), соответствующее иыраже1- И о (13) .
Полученный результат хранится в блоке 28.
Таким образом, предлгчгаемый блок подстройки параметров реализует вы- числегтие оценок Р; ( Д) по выражениям (11)-(i3), обеспечивающим в асимпто- гкке №1нимизаци1о критерия (1), тем :;ам1)1м д.остигается достижение требуемой адекватности модели процессу не- прерЕтШной разливки металлов, т.е. вы- ,ггнение неравенства ( 10) . Работа блока 17 снпхропизируется сигналами С,., поданаемы -- и с блока 18.
Блок 11 оптим.чзации (фиг. 4) рабо- тает следуюЕщм образом.
Сиг нали, соответствующие матрице Q, поступают с блока 18 и хранят- i ся в 6jtOKe 34, с KOTOpdro с приходом I сигнала С выдаются в матричный блок 35 перемнсгжения. На другой вход блока 35 поступает транспонированная матрица А( л) с блока 17. На выходе блока 35 образуется А ( /) Q, поступаю- 1ций на второй блок 35 перемножения, образующий с помощью блока 34 памяти матричный сигнал А ( ;) QA(i) , преобразуемый сумматором 26 в сигнал
W(fl)A ( -A)QA()+c(E. (20)
Размерность матрицы W()-nxn.
, В блоке 37 обращения матрицы полу- .ченный сигнал преобразуется в сигнал Х( :А) W ( Л) . На векторный блок 38 перемножения поступают матричный сигнал B( A)J-: блока 17 и векторный сигнал Z(9) с блока 12. На его Еьп-соде образуется векторный сигнал B( ;)Z(Эt;) , который вторым блоком 38, связанным с блоком 35, преобразуется в векторный сигнал А ()QB() Z(4t) ,
поступающий на вход третьего блока 38, на другой вход которого поступает сигнал V (} . На выходе этого ёлока образуется сигнал U(9e) , соответствуювдай выражению (7) и обеспечиваюндий минимизацию критерия (6). Синхронизация работы блока 11 осуществляется сигналами С,,,С,, посту- пaюrJцi ш с блока 18.
t1
Особенностью блока 11 является блок 37 обращения матрицы (фиг. 6), который работает следующим образом.
В первый блок 48 помещается левая треугольная матрица такая, что при любой матрице ( Х) , вычисленной по выражению (20), выполняется неравенство
()|М1,(21)
где С( Д)У( Л)-3-(пхп)-правая треугольная матрица, образуемая в матричном блоке 45 вычисления разности.
Во втором блоке 48 помещается заранее вычисленная матрица . Третий блок 48 используется для хранения единичной матрицы Е размером пхп. Из этого блока по сигналу j со счетчиком 51 адреса в блок 49 поступает (пх1)-вектор
, ,
EjH
, , ,...,n. (22)
Этот вектор, используется в качест20 Таким образом, предлагаемое устройство вырабатывает и поддерживает оптимальный режим вторичного охлаждения в условиях нестационарности параметров процесса и влияния неконтроливе начального приближения х;(о) искомого j-ro столбца матрицы N (9), по- 25 руемых возмущений. Учет этих факторов
ступающего в блок 47 перемножения. Сигналы С()х ( х) с выхода блока 47 и сигнал Е с третьего блока 48 поступают на входы векторного блока 46, на выходе которого образуется разностный векторный сигнал 8) (9) ЕрС( А)х. (1).
Полученные сигнал S,( }() в блоJ
ке 47 преобразуется в сигнал
x(-1)S- E--C(ll)xj(l), (23) реализуя тем самым итерационную процедуру метода Некрасова, которая сводится к точному значению х. Разность векторов ()x-( A + ( A),
образуемая в блоке 46, преобразуется Э блоке 47 в квадрат нормы вектора г(Й):1| ()1| г ( А)( й), которая в блоке 52 сравнивается с заданной константой ,. Если оказывается, что 11 г( А)11 , в блоке 50 вырабатывается сигнал, отпирающий вентиль, пропускающий сигнал xj( A + 1) с блока 47
22896512
в блок 49. При этом значение Х;( А) заменяется на х; ( + ). В противном
Z
случае, когда | 7( Л) |Г 8 , отпирается вентиль. Пропускающий сигнал
5 () в блок 48 хранения матрицы W () , и вырабатывается импульс, поступающий на счетный вход с гетчи- ка 51, который вырабатывает следующий сигнал . Так продолжается
10 до тех пор, пока счетчик не достигает до п. Образуемый при этом сигнал переполнения С поступает на второй блок 50, через который полученная (пхп) - матрица x()W ( Я) поступает
)5 в блок 38.
Сигналом Ср, поступающим с блока 18, запускается счетчик 51, а сигналом С, синхронизируется работа вентилей 50.
20 Таким образом, предлагаемое устройство вырабатывает и поддерживает оптимальный режим вторичного охлаждения в условиях нестационарности параметров процесса и влияния неконтроли25 руемых возмущений. Учет этих факторов
осуществляется путем подстройки параметров модели, минимизирующей критерий (5), а также путем учета интенсивности неконтролируемых воздейст- ВИЙ (матрицы R) при определении оптимальных заданных температур в зоне охлаждения, определяемых блоком оптимизации по выражению (7).
Предлагаемое устройство позволяет повысить однородность внутренней структуры слитка за счет дополнительно введенных блоков: блока оптимизации, блока памяти данных, блока подстройки параметров и командного блока, обеспечивающих режим вторичнрго охлаждения слитка. Преимущества системы делают целесообразным ее внедрение в виде встроенной системы автоматического управления с использованием микропроцессоров или микро-ЭВМ.
Применение системы позволит снизить брак металлопродукции на 0,1%.
7
С Утка 7 С Smm S
фиг.г
. - (1лЫу{я.§(
cf/ro a -/2
Фиг.З
с ff/iofot f8
/fffj
ф1/г,4:
CS/io/(a
фиг. 5
CSflOKO JS W
5
J7 S
48
-
XjfX
c-w-s
CXjix)
Г-/
48
Ci
f
y.
Xj()
Л
J
n
rfx)
47
S3
-P
4VI
KSM
I
KSMOKi/ 38 Фиг.В
Г
S4
С,
55
Залус/
61
62.
а
--ч
. //
56
С
1/ у
58
57
/N.
п
Сб
f
60
J
2
Kfffl,iz
Фиг. 7 Cf Со
Cr
2
H(/i.n
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Устройство для кодирования сигналов при цифровой передаче | 1986 |
|
SU1363474A1 |
| Система оптимизации режимов работы объекта | 1986 |
|
SU1345168A1 |
| Устройство управления весовым дискретным дозированием сыпучих материалов | 1986 |
|
SU1425463A1 |
| Перестраиваемый цифровой фильтр с программируемой структурой | 2016 |
|
RU2631976C2 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| Система управления поиском оптимальной рецептуры смесей | 1984 |
|
SU1180365A1 |
| Система идентификации параметров объекта | 1986 |
|
SU1413597A1 |
| Устройство для приема широкополосных сигналов | 1990 |
|
SU1774505A1 |
Составитель Г.Демий Редактор И.Николайчук Техред И.Верес Корректор
Заказ 2401/9 Тираж 757 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная, 4
фиг. 8
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
