Изобретение относится к машине- и приборостроению и может быть использовано для автоматизации и технологических процессов сборки разъемных соединений с номо- щью резьбовых крепежных деталей, в частности при сборке деталей промышленными ро- ботами.
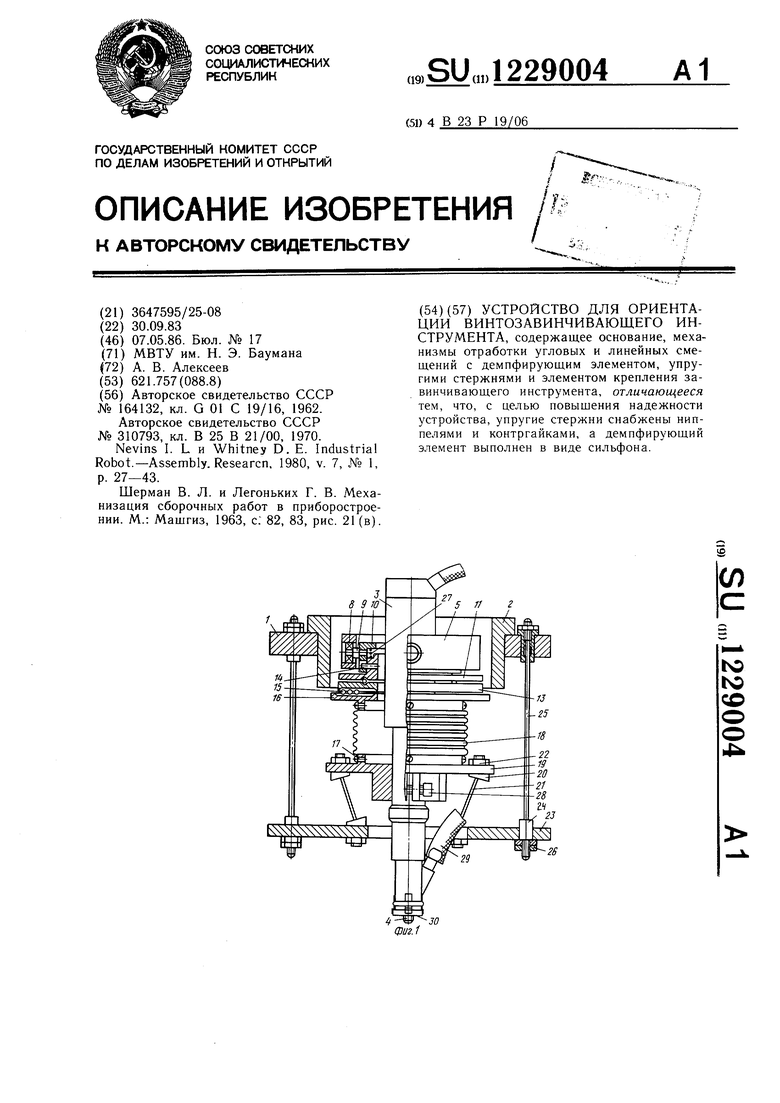
Цель изобретения - повышение надежности устройства путем снабжения упругих стержней ниппелями с контргайками и выполнения демпфирующего элемента в виде сильфона.
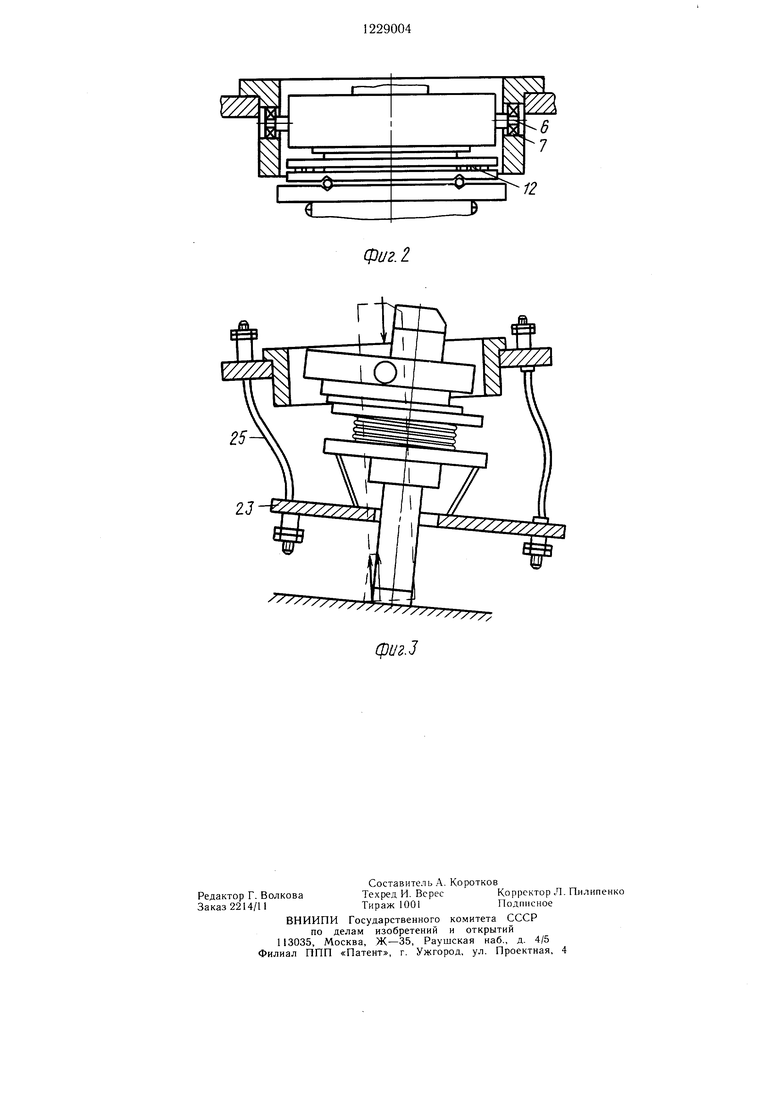
На фиг. 1 показано устройство, обш,ий вид; на фиг. 2 - механизм отработки угловых и линейных смещений; на фиг. 3 - устройство в рабочем положении.
Устройство состоит из основания 1, при- крепляемого к руке робота, установленных на нем в кольцевой втулке 2 шарнирного механизма отработки угловых смешений и муфты обработки линейнь х смеш,ений осей машины 3 и винта 4 относительно отверстия присоединяемой детали. Шарнирный механизм состоит из кольца 5, в котором на осях 6 расположены два подпшпника 7, установленные в кольцевой втулке. В кольце 5 перпендикулярно осям подшипников 7 расположены подшипники 8 на осях 9, которые установлены в упорном кольце 10, относительно которого подвижно в осевом направлении установлена верхняя платформа 11 муфты отработки линейных смещений. Верхняя платформа через 1парики 12, расположенные в пазах, связана со средней платформой 13 муфты. Верхняя платформа предохраняется от поворота вокруг оси штифтами
14,Нижняя часть средней платформы 13 муфты имеет пазы, перпендикулярные пазам в верхней части, в которых находятся шарики
15,служащие связью с ьп1жней платформой
16,к нижней части которой винтами 17 прикреплен сильфон 18. который противоположным концом прикреплен винтами 17 к втулке 19. На втулке 19 установлены верхние опоры 20 упругих наклонных регулируемых стержней 21, закрепленные гайками 22, нижние опоры наклонных стержней аналогичны верхним и установлены в диске 23, в котором установлены нижние опоры 24 упругих прямых регулируемых стержней 25, а аналогичные
им верхние опоры установлены в основании 1. Прямые стержни имеют воз.можность перемещаться в осевом направлении относительно диска 23 и основания 1 в цилиндрических Н1арпирах. Длина прямых стержней
0
5 5 о
0
регулируется гайками 26, наклонных - гайками 22. Сильфон 18 и пружина 27 создают силовое замыкание упругих прямых стержней и муфты отработки линейных смещений соответственно. В втулке 19 закреплена винтом 28 завертывающая машина 3.
Устройство работает следующим образом.
Рука робота с закрепленным на ней устройством подходит в заданную точку пространства. В процессе перемещения по сигналу системы управления в завертывающую машину 3 подается винт 4 по шлангу 29. После выхода устройства в заданную точку включается привод вращения машины 3 и робот подводит устройство к соединению. Лезвие отвертки . (не показано) завертывающей машины приводит винт во вращение, совмещаясь со шлицем головки винта, наживляет, завинчивает и затягивает с требуемым моментом.
В случае несовпадения осей и наличия угловых перекосов винта и машины с отверстием устройство работает следующим образом.
Завертываюпдая машина упирается краем наконечника 30 в плоскость присоединяемой детали и под действием возникаюп 1их уси- .лий становится торцом наконечника по плоскости, причем механизм отработки угловых и муфта отработки линейных смеще- шй обеспечивают установку звертывающей мапшны 3, а наклонные 21 и прямые 25 упругие стержни изгибаются, отслеживая движение машины. При этом диск 23 разворачивается и смещается, устанавливаясь приблизительно параллельно плоскости присоединяемой детали, что возможно только при наличии подвижных в осевом направлении прямых упругих стержней 25.
При включении привода вращения завер- тываю1цей машины и дальнейшем движении руки робота вниз винт, прижатый лезвием отвертки к плоскости присоединяемой детали, благодаря наличию стержней 21 и 25., описывает центром вместе с завертывающей машиной сложную траекторию, причем ось винта и машины остаются перпендикулярными плоскости присоединяемой детали, а 1Ол1.виж110сть прямых упругих стержней 25 в осевом направлении позволяет не прекра- 1цат1. движение руки робота. При этом сильфон 18 несколько сжимается.
После завинчивания винта рука робота отводит устройство от присоединяемой детали, которое вновь готово к работе.
0
Т
5.
:0
Т
фиг.г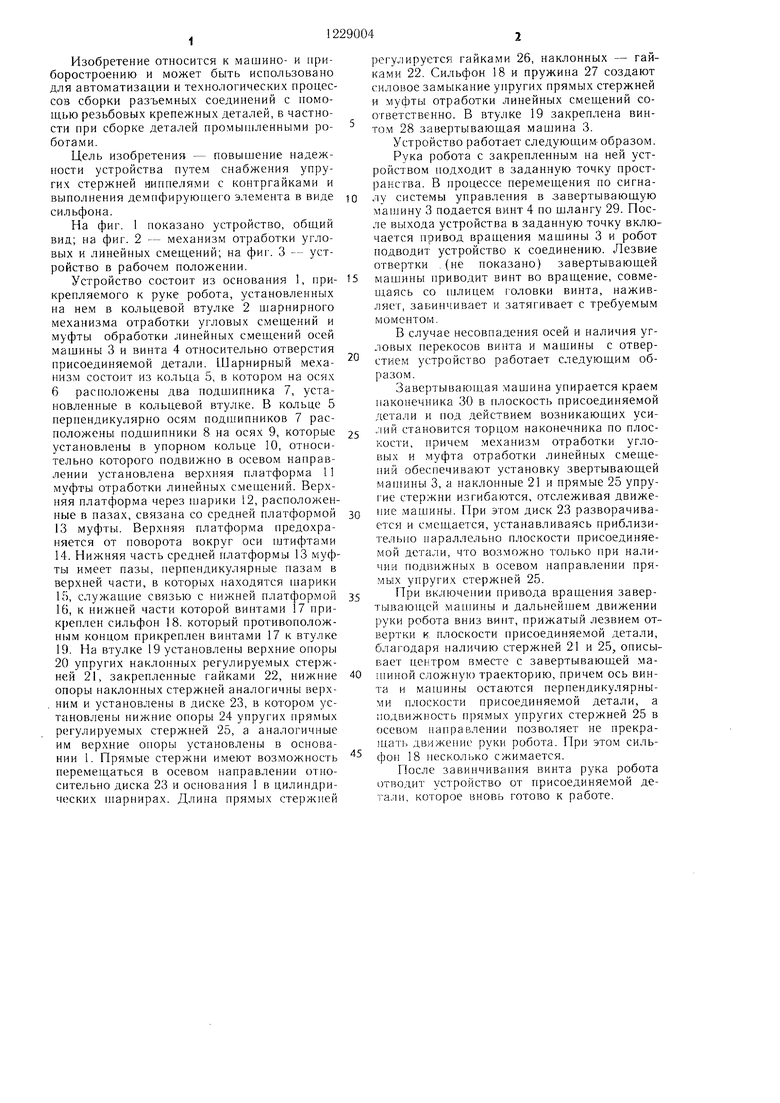
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочно-захватное устройство | 1987 |
|
SU1468743A1 |
| Винтоверт | 1987 |
|
SU1618562A2 |
| Схват для сборки деталей | 1983 |
|
SU1127738A1 |
| Адаптивная сборочная головка промышленного робота | 1988 |
|
SU1618561A1 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| УНИВЕРСАЛЬНЫЙ СЪЕМНЫЙ ПОДЛОКОТНИК | 2010 |
|
RU2434565C1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
| Винтозавертывающая машина | 1973 |
|
SU478706A1 |
| Способ затяжки резьбового соединения | 2015 |
|
RU2621749C2 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
фиг.З
| СПОСОБ ПОДВЕСА ГИРОУЗЛА В КАРДАННОЙ РАМЕ | 0 |
|
SU164132A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРИВОДНАЯ ГОЛОВКА для ОТВОРАЧИВАНИ КРЕПЕЖНЫХ ДЕТАЛЕЙВ!"^5лисгс:п•' "-.-' 'tp^jrt;';.:^ ,.'•1, b.fi , jfv,: :• _ | 0 |
|
SU310793A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Nevins I | |||
| L и Whitney D | |||
| Е | |||
| Industrial Robot.-Assembly | |||
| Researcn, 1980, v | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Шерман В | |||
| Л | |||
| и Легоньких Г | |||
| В | |||
| Механизация сборочных работ в приборостроении | |||
| М.: Машгиз, 1963, с: 82, 83, рис | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
