Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано в качестве схвата преимущественно для за- хвата плоских предметов сложной кон- фигурации различных размеров,
Цель изобретения - упрощение конструкции и обеспечение надежности захвата путем вьтолнения лепестков в теле пластины образующей с корпу- сом полость.
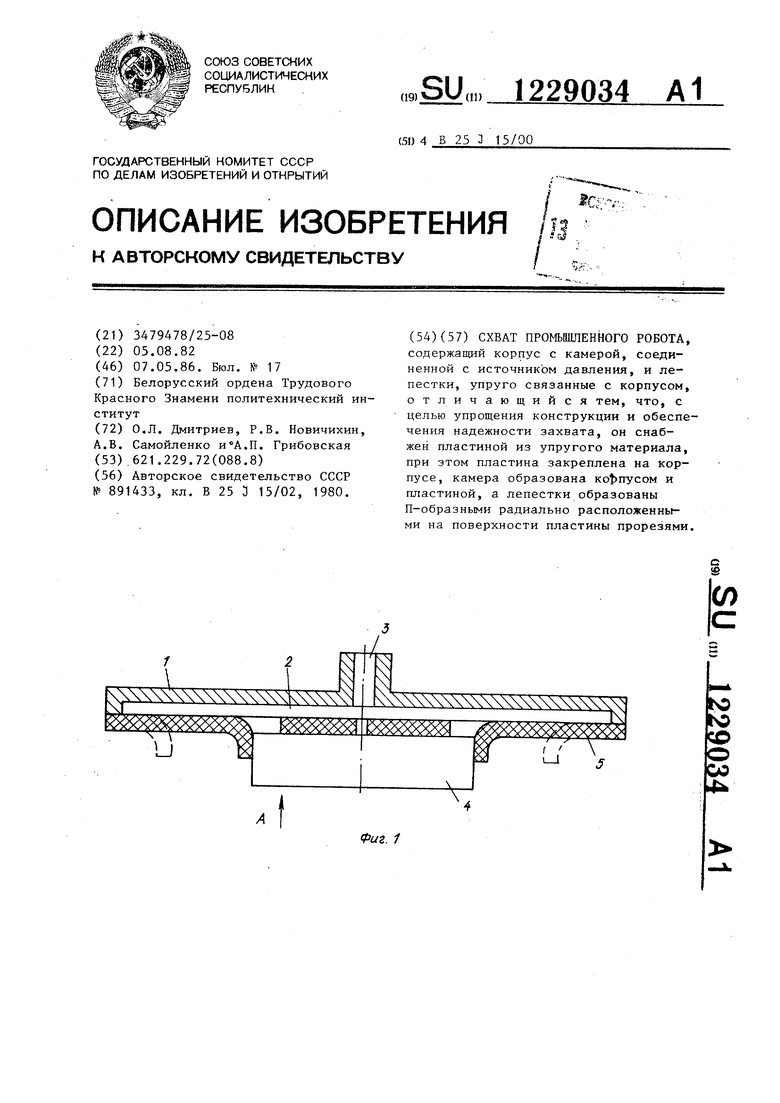
На фиг. 1 изображен схват, разрез на фиг. 2 - вид А на фиг. 1.
В корпусе 1 имеется камера 2, соединенная каналом 3 с источником сжатого воздуха (не показан). На торце корпуса, обращенном к захватЕ 1- ваемому предмету 4, закреплена пластина 5 из упругого материала, например резины. В теле пластины 5 имеются профильные незамкнутые прорези 6, например П-образные (фиг.2) Г-образные, в виде неполной дуги окружности или эллипса и т.д., образующие лепестки 7.
Устройство работает следующим образом.
В исходном положении в камеру 2 сжатый воздух не подается, все части пластины 5 находятся в одной плоскости. Для захвата устройство подводится к предмету 4. На некотором расстоянии от предмета в камеру 2 начинает подаваться сжатый воздух под действием которого все лепестки 7 выгибаются в сторону предмета 4 (фиг. 1). Схват продолжает движение к предмету и упирается в него. При этом часть лепестков 7, вступивших
342
в контакт с предметом, подгибается sfM до совмещения с. плоскостью всей пластин) 5, т.е. занимает свое исходное положение, В следующий момент подача сжатого воздуха прекращается, исчезают силь, изгибаю цие лепестки, и они под действием своей упругости стремятся занять первоначальное положение. При этом те из пальцев, которые оказались расположеннь ми по контуру предмета, зажмут его. Для отпускания предмета необходимо на некоторое время опять подать сжатый воздух.
Для предотвращения выгиба всей пластины в сторону предмета (если это нежелательно) в момент подачи воздуха ее участки, не являющиеся пальцамиJ выполняются с повьпиенной жесткостью, например имеют большую толщину, армированы металлическими элементами или имеют дополнительное крепление к корпусу клеем, или механическое о
Для увеличения числа пальцев, участвующих в захвате, пальцы соседних рядов смещены один относительно другого, например, на-1/3 радиального шага (фиг, 2),
Для захвата предметов за-внутренние поверхности пластина 5 заменяется на аналогичную, но с положением перемычек прорезей к центру устройства. Для захвата стержней используется пластина не с радиальным, а с парал- лельнв м направлением лепестков 7, при этом лепестки одной половины пластины направлены навстречу лепесткам другой половины.
Jpi/E J
Редактор Н. Тупица
Составитель Ф. Майоров Техред В.Кадар
Заказ 2405/12 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, л. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Р орректор О. Луговая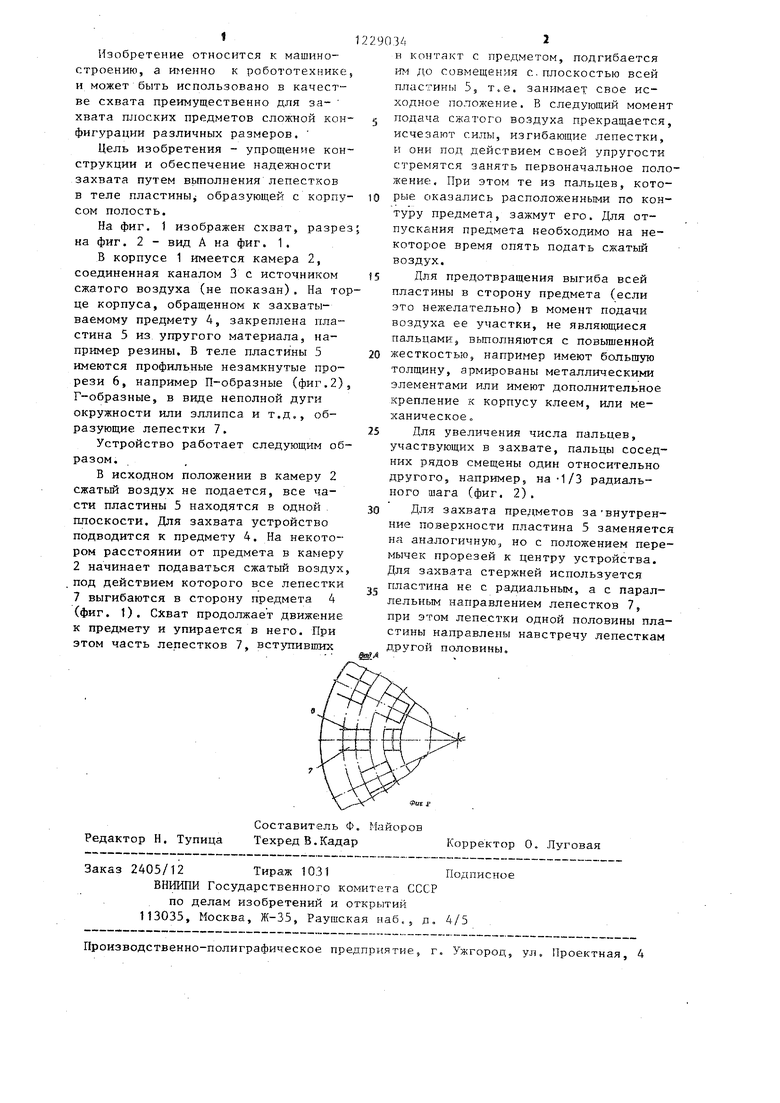
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ТРУБ ПРИ ПОДЪЕМЕ И ЗАЩИТЫ ОТ ПОПАДАНИЯ ПОСТОРОННИХ ПРЕДМЕТОВ В СКВАЖИНУ | 2023 |
|
RU2822051C1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Искусственная кисть | 1979 |
|
SU854388A1 |
| Схват промышленного робота | 1980 |
|
SU891433A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
