Изобретение относится к машиностроению, в частности к технологическому оборудованию подупроводникового производства, и может быть использовано в конструкциях промьшленных роботов, манипуляторов и механических рук, применяемых в ; лектротехнической электронной промьшшенности для контроля электрических параметров электронных приборов.
Цель изобретения расширение функциональных возможностей путем обеспечения проведения испытаний полупроводниковых приборов при их захвате и переносе.
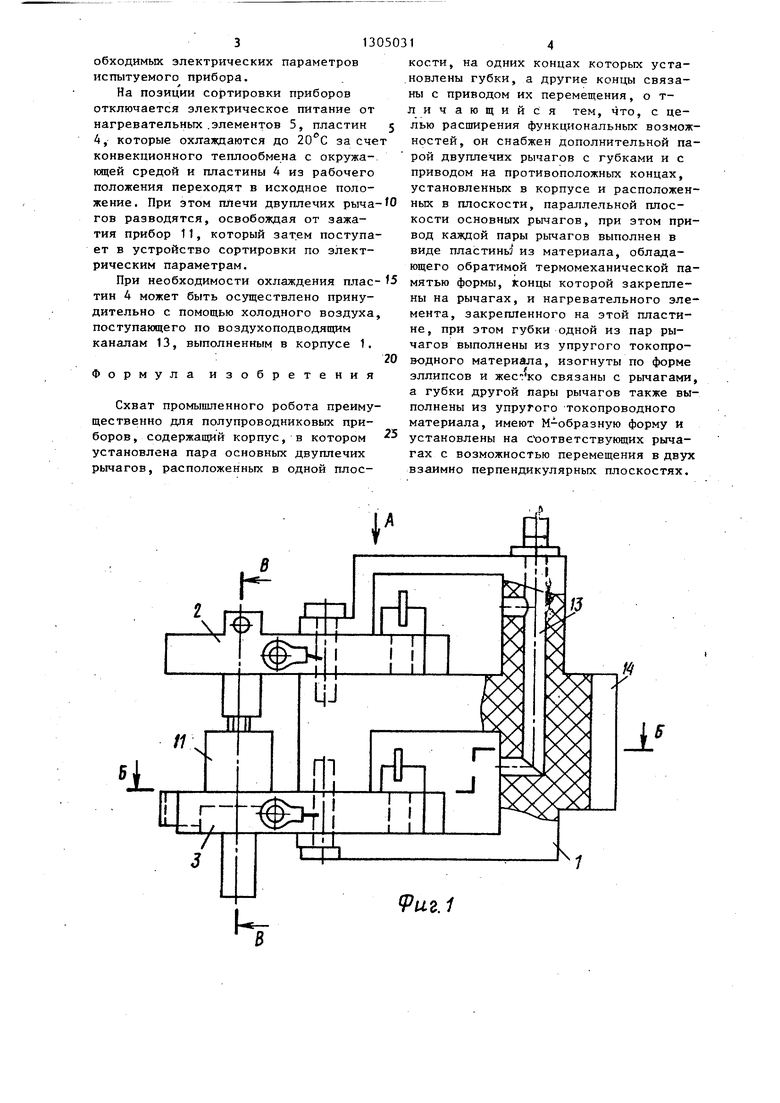
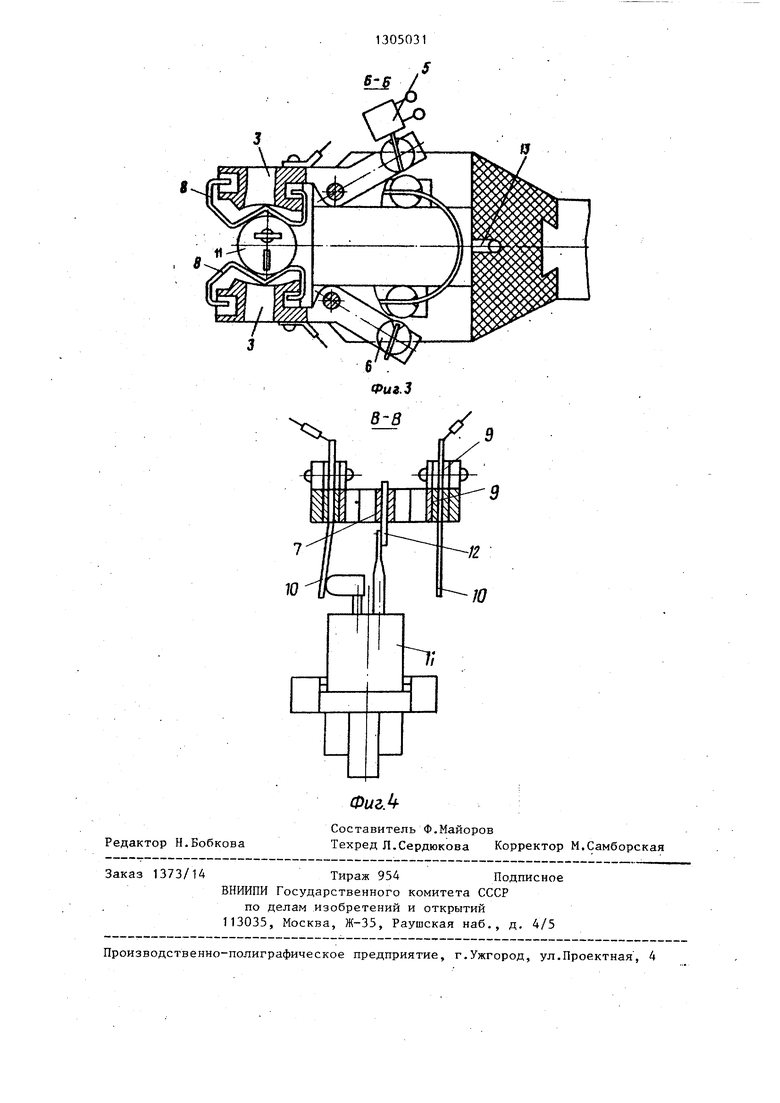
На фиг. 1 изображен схват, общий вид на фиг. 2 - вид А на фиг. 1-, на фиг. 3 - сечение Б-Е1 на фиг. 1; на фиг 4 - сечение В-В на фиг. 1.
Схват промышленного робота содержит корпус 1, в пазах которого установлены в параллельных плоскостях пара основных 2 и дополнительных 3 двуп.печих рычагов, на одних концах которых закреплены губки, выполняющие одновременно роль электрических контактов, а другие концы связаны с приводами их перемещения, каждый из которых выполнен в виде пластины 4 из материала, обладающего обратимой термомеханической памятью формы, на которой закреплен нагревательный элемент 5. Пластина 4 своими концами закреплена на рычагах с помощью пальцев 6, установленных с возможностью поворота. Губки 7 одной из пар рычагов, например рычагов 2, выполнены из упругого токопроводного материала, изогнуты по форме эллипсов и жестко связаны с рычагами, а губки 8 другой пары рычагов 3 также выполнены из упругого токопроводного материала, имеют М-образную форму и установлены на соответствующих с возможностью перемещения в двух взаимно перпендикулярных плоскостях. Кроме того, на, рычагах пары 2 через изоляторы 9 закреплены контакты 10, взаимодействующие с управляющим выводом полупроводникового прибора 1 1.
Выполнение губок 7 в виде эллипсов дает возможность при захвате испытуемого прибора 11 ориентировать его так, что плоскости его катодного вьшода 12 всегда располагаются параллельно больщой оси эллипсов.
В случае, если плоскости катодного вывода 12 прибора не параллельны больO
5
0
5
0
5
0
5
0
5
шим осям эллипсовгубок 7, то при взаимодействии их с катодным выводом захватываемого прибора 11 последний принудительно разворачивается.
В корпусе 1 выполнен также возду- хоподающий канал 13, обеспечивающий при необходимости принудительное охлаждение привода пластин 4. Кроме того, корпус снабжен крепежно-фикси- рующими элементами 14, с помощью которых схват крепится к руке робота или манипулятора.
Губки 7 и 8, контакты 10 электрически связаны с измерительной аппаратурой контроля электрических параметров испытуемого прибора 11.
Устройство работает следующим образом.
Схват подводят к полупроводниковому прибору 11, который занимает на позиции захвата вертикальное положение. При этом плечи двуплечих рычагов разведены, а пластины 4 привода занимают исходное положение.
После этого подается команда на включение электропитания нагреватель- ного элемента 5 пластины 4 двуплечих рычагов 2, к которым закреплены губки 7 и контакты 10. Пластина 4 нагревается до 60 С,, изменяет свою форму и переходит в рабочее положение (фиг.2).
При переходе пластины 4 из нерабо- ,чего положения в рабочее плечи двуплечих рычагов пары 2 сближаются, осуществляя тем самым одновременно ориентирование прибора 11, подключение контакта 10 к его управляющему выводу захват (подключение) его катодного вывода с помощью губок 7. С задержкой во времени 0,6-1 с подается команда от блока управления на включение нагревательного элемента 5, пластины 4 двуплечих рычагов 3. Пластина 4, негпеваясь до 60 С, также изменяет свою форму, осуществляя тем подключение и захват анодного вывода прибора 11 с помощью плавающих губок 8, которые самоустанавливаются, слегка упруго деформируясь, и равномерно обжимают анодный вывод прибора 11, обеспечивая надежный электрический контакт, а следовательно, надежный захват. После чего рука манипулятора вместе со схватом перемещается к позиции сортировки приборов. При перемещении схвата от позиции захвата прибора 11 к позиции его сортировки осуществляется замер не3130503
обходимых электрических параметров испытуемого прибора.
На позиции сортировки приборов отключается электрическое питание от нагревательных .элементов 5, пластин 5 4, которые охлаждаются до за счет конвекционного теплообмена с окружающей средой и пластины 4 из рабочего положения переходят в исходное положение. При этом плечи двуплечих рыча- О ных в плоскости, параллельной плосгов разводятся, освобождая от зажатия прибор 11, который затем поступает в устройство сортировки по электрическим параметрам.
При необходимости охлаждения плас-J5 мятью формы, концы которой закреплетин А может быть осуществлено принудительно с помощью холодного воздуха, поступающего по воздухоподводящим каналам 13, выполненным в корпусе 1,
Формула изобретения
Схват промышленного робота преимущественно для полупроводниковых приборов , содержащий корпус, в котором установлена пара основных двуплечих рычагов, расположенных в одной плос20
25
ны на рычагах, и нагревательного элемента, закрепленного на этой пластине, при этом губки одной из пар рычагов выполнены из упругого токопро- водного материала, изогнуты по форме эллипсов и связаны с рычагами, а губки другой пары рычагов также выполнены из упругого токопроводного материала, имеют М-образную форму и установлены на соответствующих рычагах с возможностью перемещения в двух взаимно перпендикулярных плоскостях.
кости, на одних концах которых установлены губки, а другие концы связаны с приводом их перемещения, о т- л и чающийся тем, что, с целью расширения функциональньпс возможностей, он снабжен дополнительной парой двуплечих рычагов с губками и с приводом на противоположных концах, установленных в корпусе и расположенкости основных рычагов, при этом привод каждой пары рычагов выполнен в виде пластиньЗ из материала, обладающего обратимой термомеханической па
ны на рычагах, и нагревательного элемента, закрепленного на этой пластине, при этом губки одной из пар рычагов выполнены из упругого токопро- водного материала, изогнуты по форме эллипсов и связаны с рычагами, а губки другой пары рычагов также выполнены из упругого токопроводного материала, имеют М-образную форму и установлены на соответствующих рычагах с возможностью перемещения в двух взаимно перпендикулярных плоскостях.
9иг.1
fil
ff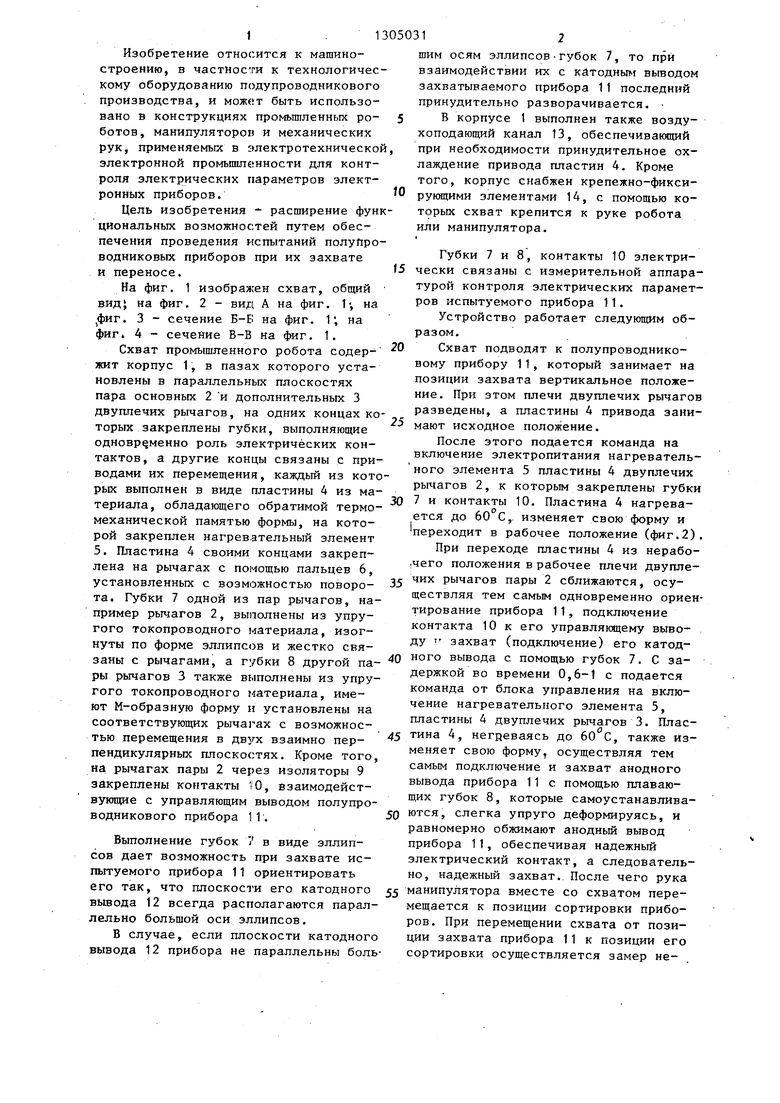
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1388281A1 |
| Схват манипулятора | 1984 |
|
SU1266736A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Центрирующий схват | 1985 |
|
SU1283093A1 |
| Очувствленный схват | 1985 |
|
SU1294602A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Устройство для сортировки полупроводниковых приборов по электрическим параметрам | 1980 |
|
SU1014072A1 |
| Схват промышленного робота | 1985 |
|
SU1284830A1 |
| Схват промышленного робота | 1986 |
|
SU1328196A1 |
Изобретение относится к машиностроению, в частности к технологическому оборудованию полупроводникового производства, и может быть использовано в конструкциях промышленных роботов, манипуляторов и механических рук, применяемых в электротехнической, электронной промьшленностях рля контроля электрических параметров электронных приборов. Целью изобретения является расширение функциональных возможностей путем обеспечения проведения испытаний полупроводниковых: приборов при их захвате и переносе. При подаче питания на нагревательный элемент 5, закрепленный на пластине 4, вьтолненной из материала, обладающего обратимой термомеханической памятью формы, происходит сведение губок 7, установленных на паре двуплечих рычагов 2. Губки 7, выполненные из упругого токопроБодного материала по форме эллипсов, ориентируют и зажимают плоский вывод полупроводникового прибора, одновременно подключая контакты к его управляющему выводу. Затем происходит сведение второй пары губок, охватывающих цилиндрическую часть полупроводникового прибора токопроводящими губками. После захвата прибор оказывается подключенным к системе измерения и в про- дессе его переноса производится измерение параметров прибора. 4 ил. ВидА i (Л со о СП о со (Риг.2
Редактор Н.Бобкова
Составитель Ф.Майоров
Техред Л.Сердюкова Корректор М.Самборская
Заказ 1373/14Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная , 4
Фиг.
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
