Изобретение относится к машиностроению, а именно к схватам промышленных роботов, предназначенных для автоматизации загрузки и выгрузки деталей.
Цель изобретения расширение тех- нологических возможностей путем обеспечения работы в ограниченном технологическом пространстве и с деталями сложной формы.
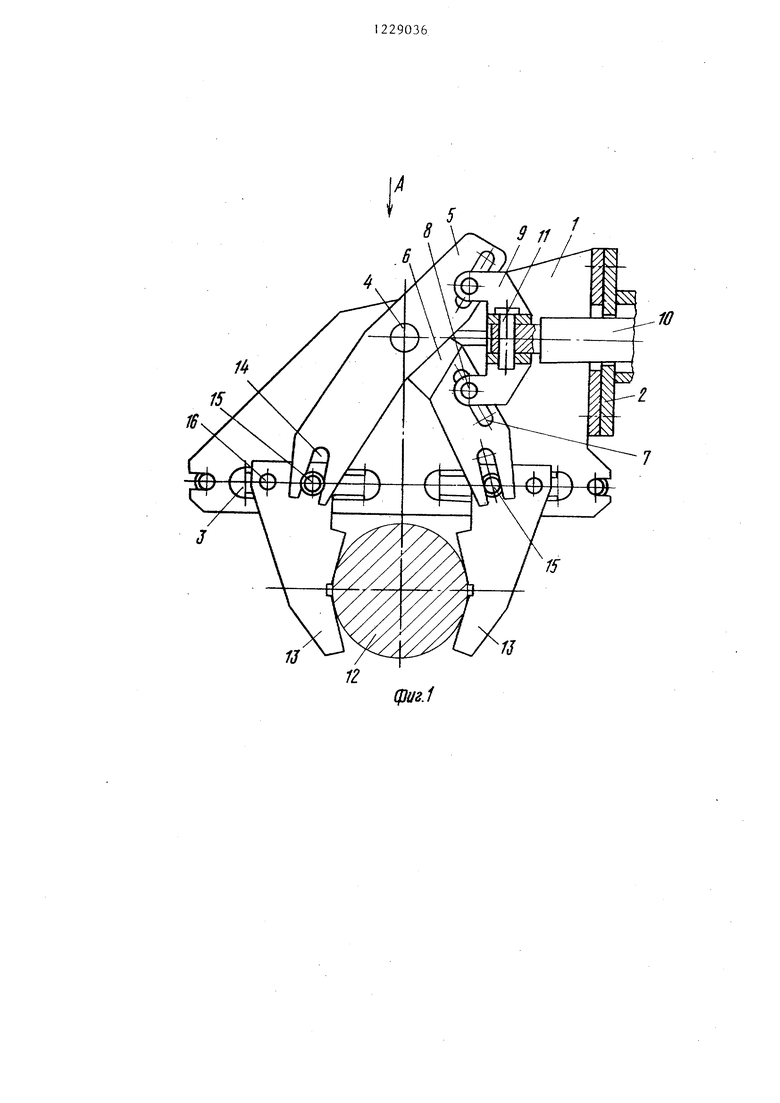
На фиг 1 изображен захват мани- пулятора, общий вид; на фиг. 2 вид А на фиг.- 1„
Захват манипулятора состоит из П образного корпуса 1, который торцом неподвижно закреплен на крьшке гидро- цилиндра 2 о На каждой из боковых сторон П-образного корпуса 1 выполнено по два прямолинейных паза 3, расположенных параллельно оси штока, и по одному отверстию для осей 4, на кото- рых шарнирно закреплены поворотные рычаги 5 и 6 с возможностью вращения вокруг осей 4 в вертикальной плоскости о Поворотный рычаг 5 выполнен двуплечим. На поворотных рычагах. 5 и 6 выполнены закрытые пазы 7, в которых свободно расположены оси 8, жестко закрепленные в вилке 9. Вилка 9 соединена с штоком 10 гидроцилиндра 2 с возможностью поворота в горизонталь- ной плоскости посредством штифта 11, проходящего через вилку 9 и шток 10. Для захвата заготовок 12 на корпусе 1 имеются зажимные элементы 3 с губками. Для обеспечения одновременного линейного перемещения зажимных элементов 13 в поворотных рыча1 ах 5 и 6 выполнены открытые пазы 14, расположенные на концах поворотных рычагов 5 и 6, причем прямолинейные пазы 3 с боковых сторон корпуса 3 и открытые пазы 14 поворотных рычагов 5 и 6 находятся в параллельных плоскостях.
В прямолинейных пазах 3 и пазах 14 расположены концы осей 15„ Средняя часть осей 15 жестко закреплена на зажимных злементах 13, Зажимные элементы 13 с губками выполнены сменными -и снабжены штырями 16, установленными в прямолинейных пазах 3 корпуса 1 .
Захват работает следующим образом
В гидроцилиндр 2 подается жидкост и шток 10 начинает перемещаться. Вме сте с ним перемещается и вилка 9, закрепленная на штоке 10 штифтом 11, Через оси 8, жестко закрепленные на вилке 9, передается усилие одновременно на поворотные рычаги 5 .и 6„ Через открытые пазы 14 поворотные рычаги 5 и 6 одновременно передают усилие на оси 15, на которых в средней части закреплены зажимные элементы 3, а концы закреплены в прямолинейных пазах 3 корпуса 1. Оси 15 под действием усилия одновременно перемещают навстречу друг другу зажимные элементы 13 губками, которые центрируют и зажимают деталь
При этом, если имеется большая разность диаметров, то, например, пара зажимных элементов 13 с губками левой стороны корпуса 1 зажимает деталь и прекращает свое перемещение В результате дальнейшего перемещения штока 10 перемещение левой пары осей 8 вилки 9 прекращается и происходит поворот вилки 9 относительно штифта 11. Правая пара осей 8 перемещается до тех пор, пока правая пара зажимны элементов 13 с губками не достигает поверхности детали и не зажмет ее.
Предлагаемый захват обеспечивает зажим и центровку деталей круглого, квадратного сечений, а также многогранников о
lit
15
16
13
ГЗ
(риг.1
л тг
Ni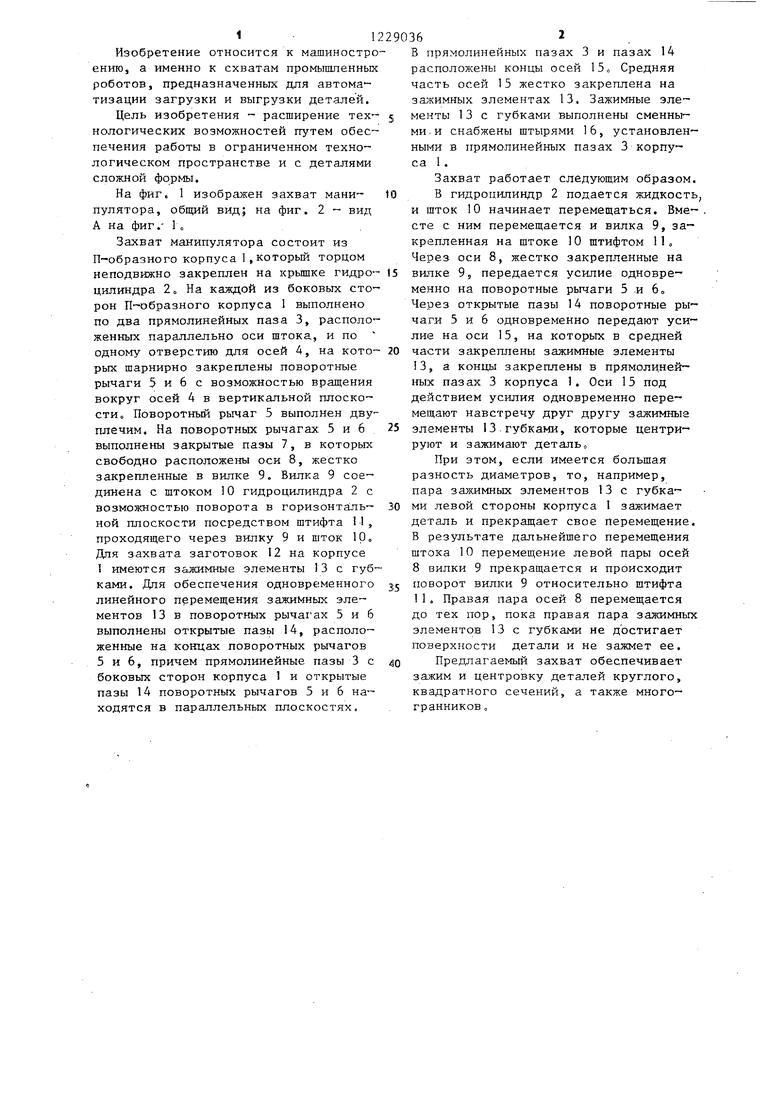
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения цилиндрических и конических деталей путем гибки с растяжением листового материала | 1983 |
|
SU1110512A1 |
| Устройство для снятия изоляции с электрических проводов | 1979 |
|
SU904057A1 |
| Модуль для автоматизированной листовой штамповки | 1989 |
|
SU1708477A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захват | 1977 |
|
SU667396A1 |
| Захват | 1977 |
|
SU663577A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
ф1/г.г
Редактор Н, Тупица
Составитель И. Бакулин
Техред Н .Боьгкало Корректор. Г. Решетник
Заказ 2406/13
Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Захват | 1976 |
|
SU568542A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
