Я поворотйого рычага 5 выбраны таким образом, что лри работе захвата оси В и В -шарниров поворотных рычагов 5 всегда на одной прямой, что обеспечивает прямолинейное перемещение зажимных губок. Два шарнирных параллелограмма, каждый из которых образован зажимной губкой 1, поворотными рычагами 5 и 6 и обш,им приводным штоком 3, обеспечивают плоскопараллельное перемеш,ение зажимных губок.
Формула изобретения
Захват, например, манипулятора, содержащий зажимные губки, связанные с корпусом и
приводом, например, линейного перемещения поворотными рычагами щарнирных параллелограммов, и коромысла, соединенные шарнирно с серединой этих рычагов и с корпусом,
отличающийся тем, что, с целью повышения надежности, упрощения конструкции и уменьщения массы и -габаритов, щарниры поворотных рычагов каждого параллелограмма смонтированы на приводе линейного перемещения, а центр шарнира, соединяющего коромысло с корпусом, расположен на прямой, проходящей через центры шарниров этих рычагов.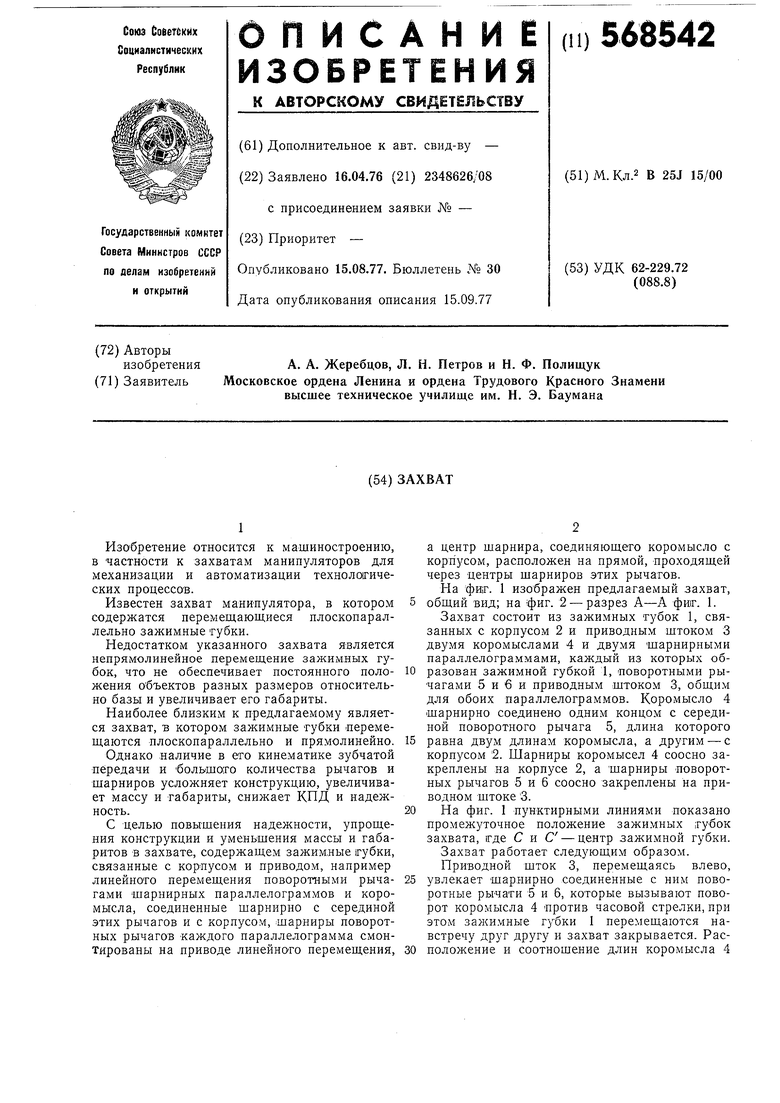
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1983 |
|
SU1098790A1 |
| Захватное устройство | 1985 |
|
SU1283098A1 |
| Сборочно-захватное устройство | 1988 |
|
SU1565681A1 |
| Захват | 1988 |
|
SU1668130A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1495121A1 |
| Устройство для подготовки радиоэлементов с осевыми выводами к монтажу | 1986 |
|
SU1370805A2 |
| Грузозахватное устройство | 1979 |
|
SU812571A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
i
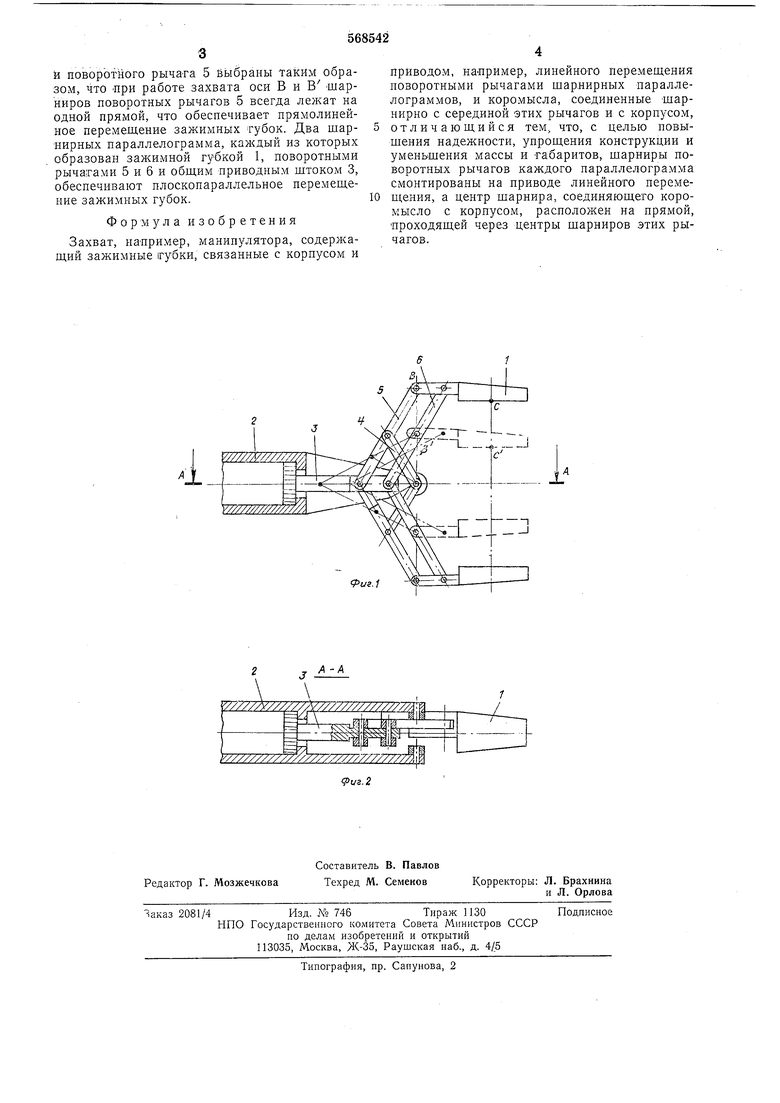
А -Л
иг.2
