1
Изобретение относится к машиностроению, а именно к захватным устройствам, используемым преимущественно в манипуляторах и других механизмах для погрузочно-разгрузочных и подъемно-транспортных операций.
Известен захват, содержащий привод и зажимные элементы l.
Недостатком этого устройства является возможность выпадения детали из захвата при аварийном сбросе давления в приводе.
Цель изобретения - повышение надежности фиксации изделия.
Для достижения поставленной цели захват снабжен двумя планками, в каждой из которых выполнены криволинейг ные пазы, причем один из них состоит из двух участков разных радиусов кривизны, а каждый зажимной элемент выполнен в виде полукольца, снабженного направляющими пальцами,установленЕ-ими в указанны-х пазах планок.
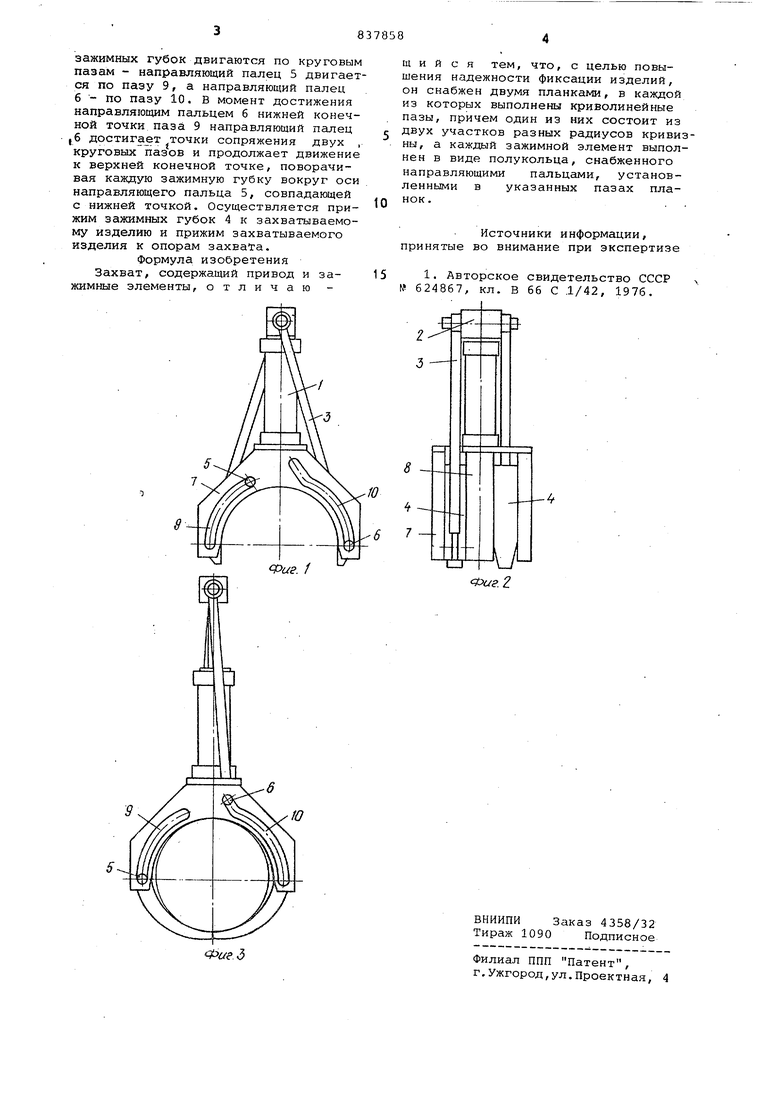
На фиг. 1 показан предлагаемый захват в раскрытом состоянии, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - захват в закрытом состоянии .
Захват содержит силовой цилиндр 1 на штоке которого неподвижно закреплен кронштейн 2, шарнирно связанный с тягами 3. Каждая тяга шарнирно связана с зажимной круговой губкой, каждая зажимная губка 4 оснащена двумя направляющими пальцами 5 и 6, один из которых, палец 6, выполняет функцию оси в шарнирном соединении тяги 3 и зажимной губки 4. Направляющие пальцы 5 и 6 располагаются в пазах крайней планки 7 и средней опоры 8. Направляющий палец 5 расположен в круговом пазу 9, а направляющий палец 6 расположен в пазу .10 сшожного профиля.
Захват работает следующим образом
В исходном положении кронштейн 2 с шарнирно закрепленными на нем тягами 3 находится в крайнем нижнем положении. Зшкимные губки 4, шарнирно связанные с тягами 3, находятся в раскрытом положении. Для захватывания изделия кронштейн 2, закрепленный на штоке силового цилиндра 1, поднимается вверх, увлекая за собой тяги 3, которые, в свою очередь,заставляют двигаться зажимные губки 4, совершая захват изделия.
Захват изделия зажимными губками происходит по круговой траектории, так как направляющие пальцы 5 и б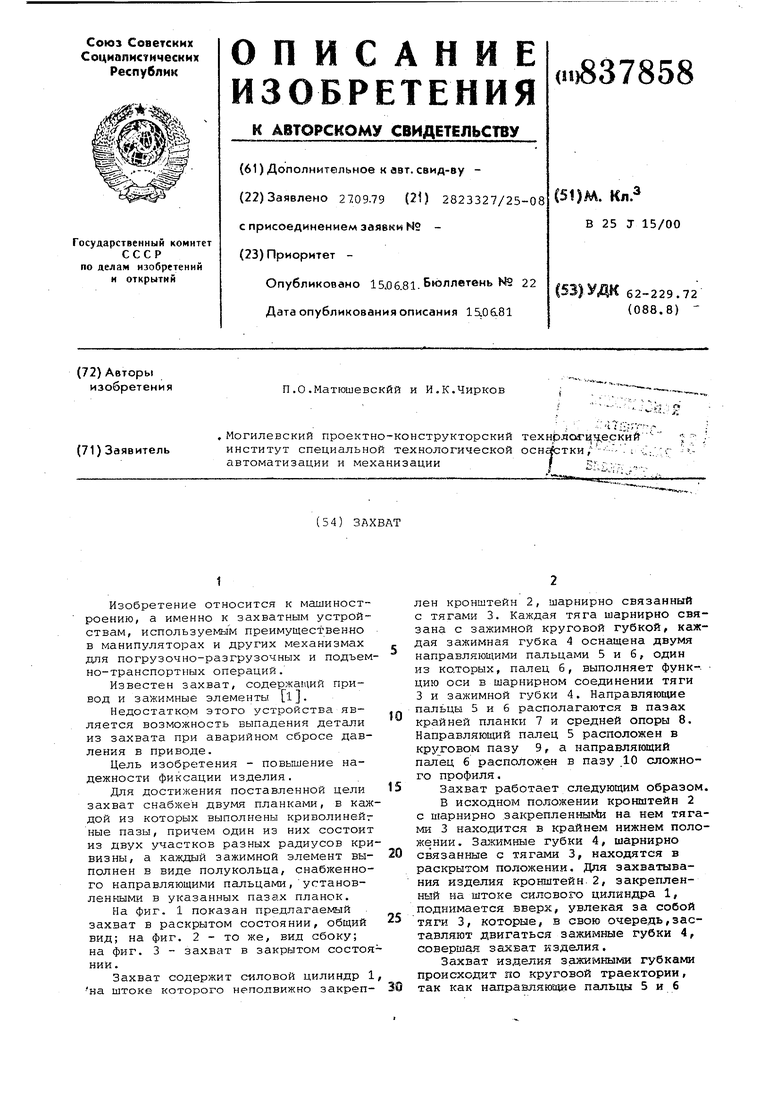
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Механическая рука | 1978 |
|
SU747605A1 |
| Устройство для базирования деталей | 1986 |
|
SU1366357A1 |
| Устройство для перемещения груза | 1982 |
|
SU1066909A1 |
| Захватное устройство | 1987 |
|
SU1504092A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДЕТАЛЕЙ МЕЖДУ КОНВЕЙЕРАМИ, РАСПОЛОЖЕННЫМИ НА РАЗНОЙ ВЫСОТЕ | 1995 |
|
RU2101220C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
