Изобретение относится к контрольно-измерительной технике, в частности к устройствам контроля взаимного положения частей разъемных контактных соединений электрических распределительных шкафов путем измерения расстояния между ними.
Цель изобретения - расширение функциональных возможностей устройст- ,ва путем определения координат точек По всем координатным осям и применения при частично вьщвинутом положении выдвижного элемента шкафа, когда доступ к разъемным контактам снаружи отсутствует.
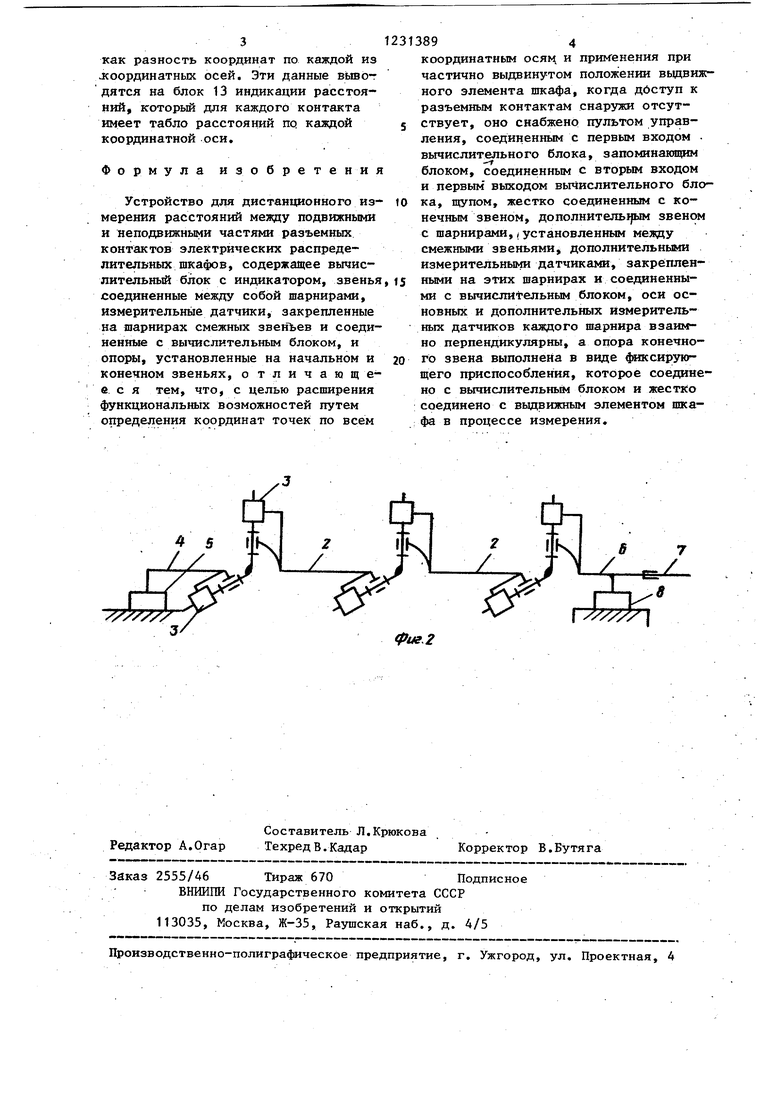
На фиг.1 представлена структурная схема предлагаемого устройства; на фиг.2 - кинематическая схема датчика перемещения.
Устройство содержит датчик 1 перемещения, состоящий из нескольких щар- нирно соединенных звеньев 2 (фиг„2) с измерительными датчиками 3, причем начальное звено 4 имеет жестко связанную с ним опору 5, закрепляемую на неподвижном основании, например, с помощью вакуумных захватов, а конечное звено 6 - щуп 7 и фиксирующее приспособление 8 с захватами, например магнитами. Устройство содержит также аналого-цифровые преобразователи 9 (фиг.1), вычислительный блок 10, запоминающий блок 11, пульт 12 управления и блок 13 индикации расстояний.
Устройство работает следующим образом.
Устанавливают датчик 1 перемещения на основании, неподвижном относительно распределительного шкафа, при этом опора 5 жестко фиксирует датчик 1 перемещения с помощью ва- -куумнЫх захватов. Извлекают из распределительного шкафа выдвижной элемент. Звенья датчика 1 перемещения располагают в начальном положении, при котором угол относительно го смещения соседних звеньев равен нулюо С пульта 12 управления включают вычислительньй блок 10. Перемещают щуп 7 из начального положения в положение касания концом щупа проверяемой точки подвижной части контакта. .В процессе перемещения щупа 7 передвигаются связанные с ним звенья датчика 1 перемещения, что приводит к изменению углов между соседними звеньями и, следовательно, выработке измерительными датчиками 3 сигналов, которые через -аналого-цифровые . преобразователи 9 попадают в вычислительный блок 10, где определяются текущие значения углов между соседними звеньями.
При касании щупом 7 проверяемой точки контакта с пульта 12 управления подается команда на вычисление координат в основной системе координат вычислительным блоком 10, которое осуществляется по значениям углов мевду звеньями и конструктивным параметрам блоков. Найденные координаты точки неподвижной части кон-.
такта вводятся в запоминающий блок 11. Аналогично вычисляются и запоми- наются координаты остальных точек неподвижных частей контактов, а затем подвижных частей.
Далее жестко соединяют конечное звено 6 с помощью фиксирующего приспособления 8 на наружной стенке выдвижного элемента. По команде с пульта 12 управления определяются координаты фиксированной точки конечного звена, которые запоминаются как координаты центра вспомогательной системы координат, а данные о координатах подвижных частей контактов выводятся из запоминающего блока 11 и в вычислительном блоке 10 пересчи- тьюаются в координаты вспомогательной системы координат, после чего они вновь вводятся в запоминающий
35
.: блок 11,
40
На этом подготовительные операции заканчиваются, и с пульта 12 управления подается команда на вьшолнение режима измерения расстояний между частями контактов.
Осуществляют перемещение выдвижного элемента в сторону распределительного шкафа, что вызьтает перемещение жестко связанного с ним конечного звена 6.и других звеньев датчика 1 перемещения.
На основе данных о текущих значениях углов между звеньями в дискретные моменты времени определяют положение вспомогательной системы координат относительно основной, а далее с использованием имеющихся в запоминающем блоке 10 координат подвижных частей контактов во вспомогательной систе- ме координат рассчитьгоают положение этих частей в основной системе координат. Затем рассчитьгоают.расстояния между частями соответствующих контактов
как разность координат по каждой из координатных осей. Эти данные вывот дятся на блок 13 индикации расстояний, который для каждого контакта имеет табло расстояний по каждой координатной оси.
Формула изобретения
Устройство для дистанционного измерения расстояний между подвижными и неподвижными частями разъемных контактов электрических распределительных шкафов, содержащее вычислительный блок с индикатором, звенья соединенные между собой шарнирами, измерительные датчики, закрепленные на шарнирах смежных звеньев и соединенные с вычислительным блоком, и опоры, установленные на начальном и конечном звеньях, отличающееся тем, что, с целью расширения функциональных возможностей путем определения координат точек по всем
10
15
2313894
координатным осяц и применения при частично выдвинутом положении вьщвиж- ного элемента шкафа, когда дбступ к разъемным контактам снаружи отсут- 5 ствует, оно снабжено пультом управления, соединенным с первым входом . вычислительного блока, запоминающим блоком, соединенным с вторым входом и первым выходом вычислительного блока, шупом, жестко соединенным с конечным звеном, дополнителыр1м звеном с шарнирами, установленным между смежными звеньями, дополнительными измерительными датчиками, закрепленными на этих шарнирах и соединенными с вычислительным блоком, оси основных и дополнительных измерительных датчиков каждого шарнира взаиг - но перпендикулярны, а опора конечного звена выполнена в виде фиксируюр- щего приспособления, которое соединено с вычислительньгм блоком и жестко соединено с выдвижным элементом шкафа в процессе измерения.
20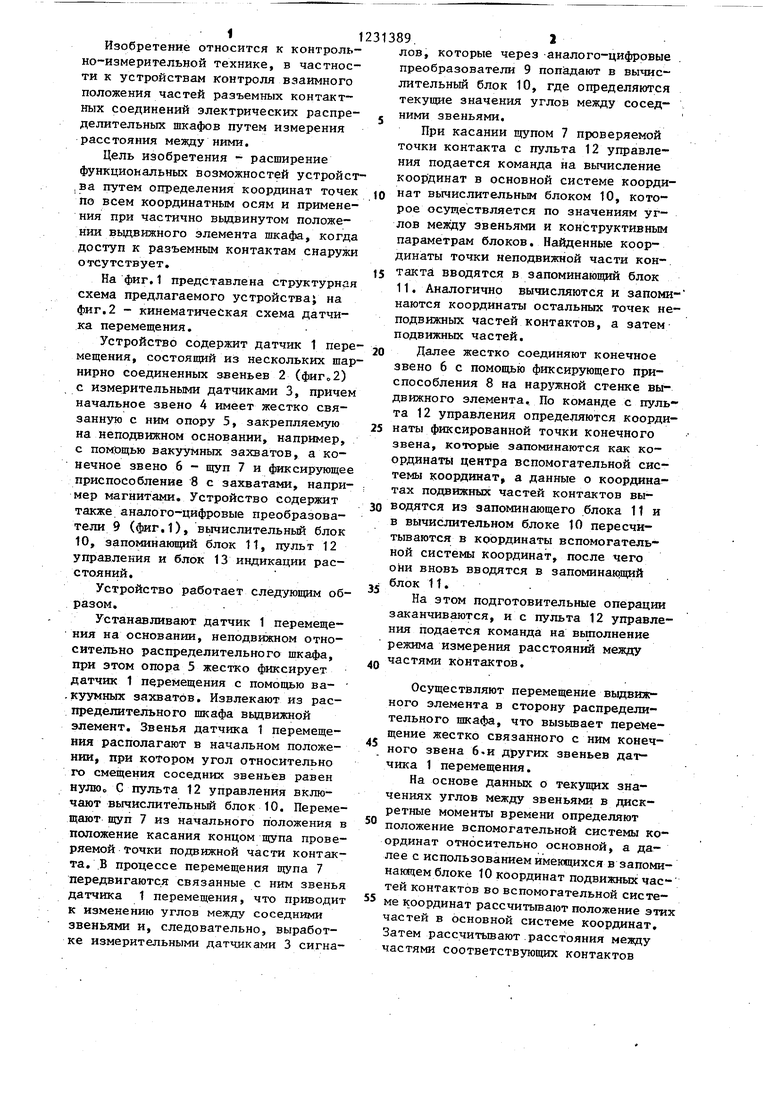
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоточечного контроля геометрии сложного профиля | 2024 |
|
RU2825540C1 |
| Способ контроля профиля зуба зубчатых колес и устройство для его осуществления | 1980 |
|
SU1145938A3 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |
| Устройство для автоматического измерения геометрических параметров крупногабаритных изделий | 1988 |
|
SU1497449A1 |
| Устройство для снятия характеристик электромагнитного коммутационного аппарата | 1988 |
|
SU1561123A1 |
| Способ контроля профиля зубьев зубчатого колеса и устройство для его осуществления | 1980 |
|
SU1025340A3 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |
| Моделирующее устройство для телескопических погрузчиков | 2021 |
|
RU2831614C2 |
| ШЕСТИОСЕВАЯ КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА И СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНОГО НАКОНЕЧНИКА ДЛЯ НЕЕ | 2007 |
|
RU2345884C1 |
Устройство для дистанционного измерения расстояний между подвижными И неподвижньши частями разъемных KOHTaKtoB электрических распределительных шкафов относится к контрольно-измерительной технике, в частности к устройствам контроля взаимного положения частей разъемных контактных соединений элек трических распределительных шкафов. Целью изобретения является расширение функциональных возможностей путем определения координат точек, по всем координатным осям проверяемых контактов. Вначале ос5пществляют подсоединение датчика 1 перемещения к подвижным и неподвиж ным частям проверяемых контактов и, определяют их положение в основной системе координат, связанной с неподвижными частями контактов, затем подсоединяют датчик t перемещения к выдвижному элементу распределн- тельного шкафа и определяют полЬяка- ние подвижных частей контактов во вспомогательной системе координат, связанной с вьщвижным элеменччэм Шкафа, далее в процессе перемещения вьодвижного элемента в сторону шкафа определяют положение вспомогательной системы координат относительно основной, на основании чего получают данные о положении подвижных частей контактов в основной системе координат, а затем рассчитьгоают расстояния между частями контактов по координатным осям. 2 ил. 00 00 00 со
I ///У/
fpue.2
Редактор А.Огар
Составитель Л.Крюкова Техред В. Кадар
Заказ 2555/46 Тираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор В.Бутяга
| Устройство для измерения координат точек поверхностей | 1982 |
|
SU1021926A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
