Изобретение относится к технике ультразвукового неразрушающего контроля качества материалов и может быть использовано в различных отраслях промьшшенности для механизации контроля.
Целью изобретения является повышение технологических возможностей контроля за счет применения платформы в виде перемещаемой вручнук тележ- кя с шарнирно закрепленной на ней стрелой с закрепленным на ней преобразователем .
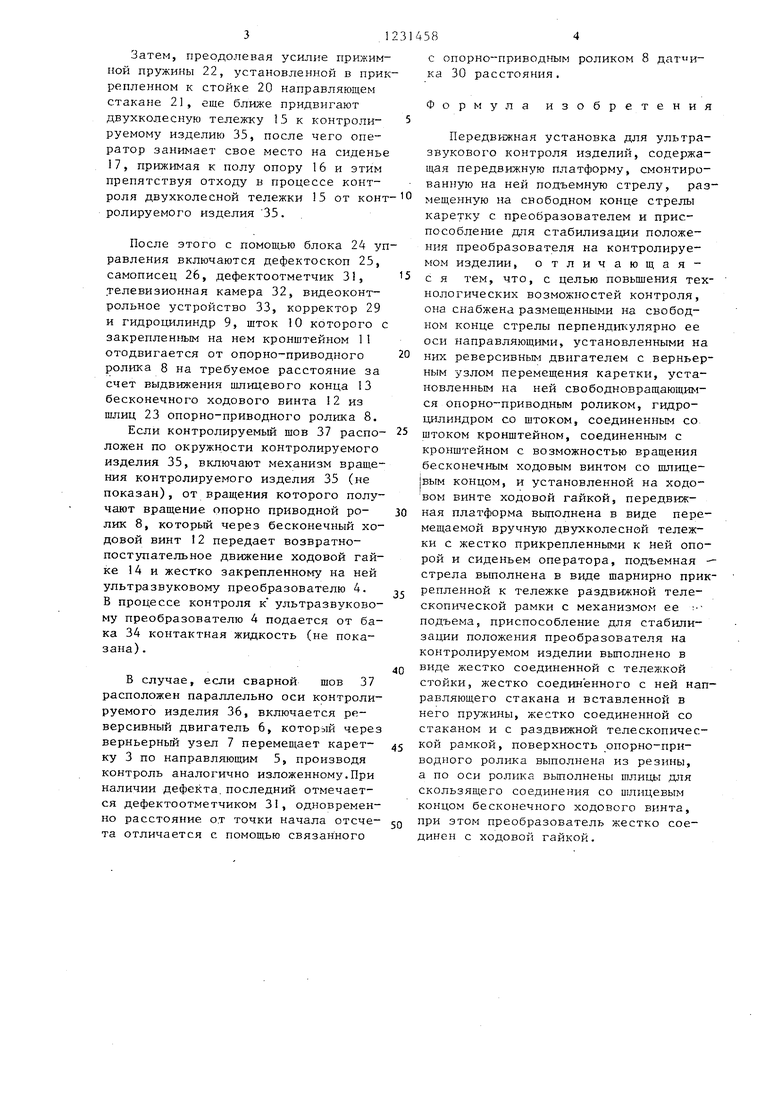
На фиг. представлена передвижная установка для ультразвукового контроля изделий, общий вид; на фиг.2 - вид А на фиг, I; на фиг. 3 - вид Б на фиг.1.
ПередБшкная установка для ультразвукового контроля изделий содержит передвшкную платформу i, смонтированную на ней подъемную стрелу 2, размещенную на свободном конце стрелы 2 каретку 3 с преобразователем 4, приспособление для стабилизации положения преобразователя 4 на контролируемом издеглрзи; размещенные на свободном конце стрелы 2 перпендикулярно ее оси направляющие 5, установленный на них реверсивный двигатель 6 с верньерным узлом 1 перемещения каретки 3, установленный на пей свобод- новращающийся опорно-приводной ролик 8, гидроцилиндр 9 со штоком 10, соединенный со штоком 10 кроштейн I соединенный с кронштейном 11 с возможностью вращения бесконечный ходовой винт 12 со шлицевым концом 13. остановленную на ходовом винте 12 ходовую гайку 14. Передвгокпая платформа 1 выполнена в виде перемещаемой двухколесной тележки 15 с жестко прикрепленными к ней опорой 16 и сиденьем оператора 17. Подъемная стрела 2 выполнена в виде шаркирно прикрепленной к тележке 5 раздвижной телескопической рамки 18 с механизмом 9 ее под7:5ема. Приспособление для стабилизации положений преобразователя 4 па контролируемом изделии выполнено в виде жестко соединенной с тележкой 15 стойки 20, жест .ко соединенного с ней направляющего стакана 21 и вставленной в него пружины 22, жеетко соединенной со стаканом 21 и с раздвижной телескопической рамкой 18, поверхность опорно- приводного ролика-8 выполнена из ре14582
ЗИН), а по оси ролика 8 выполнены 23 для скользящего соединения со пишцевым концом 13 бесконечного ходового винта 12, при этом преобра5 зов;з,тель 4 жестко соединен с ходовой 1 4 .
Кроме того, передвижная установка 1У1я ультразвукового контроля из- дел)-1Й содержит размещенный на перед0 вршной платформе 1 блок управления 24 с установленным на нем дефектоскопом 25 с самописцем 26, механизм 19 подъема рамки 18 выполнен цепным и снабжен маховиком 27, каретка 3
5 снабжена с устройством поворота 28 и корректором 29, с опорно-приводным рс1ли :ом 8 кинематически сое- дин(гн датчик 30 расстояния, а с гидроцилиндром 9 - дефектоотметчик 31,
20 под кареткой 3 жестко закреплена телевизионная камера 32, связанная с 1зидеоконтрольным устройством 33, на тележке 15 установлен бак 34 с кон- ,тактной жидкостью.
25 Позицией 35 обозначено контролируемое изделие, установленное на ро- ликоопорах 36, позицией 37 - контролируемый щов.
Передвижная установка для ультра30 звукового ко 1троля изделий работает следующим образом.
Передвижная платформа 1, выполненная в виде двухколесной тележки 15, подводится к установленному на роли35 коопорах 36 контролируемому изделию 35 до соприкосновения с ним опорно- приводного ролика 8, после чего подъемная стрела 2, выполненная в виде раздвижной телескопической рам40 ки 18, поднимается с помощью махови97
, воздействующего па механизм
19 подъема, и устанавливает карет- ку 3 в зону контролируемого шва 37. Если кoнтpoлиpye ый шов 37 располоен вдоль оси контролируемого издеия 35, каретка 3 устанавливается на нап эавляющих 5 для ее последуюЕ1,его перемещения вдоль контролируемого сва)эпого шва 37, если же сварной шов
37 расположен по окружности контролируемого изделия 35, каретка 3 с помощью устройства 28 поворота устанавливается тав;им образом, что сварной шов 37 установлен между ультразвуковым преобразователем 4 и опорно-приводным роликом 8 и при вращении контролируемого изделия 35 постоянно находится между ними.
Затем, преодолевая усилие прижимной пружины 22, установленной в прирепленном к стойке 20 направляющем стакане 21, еще ближе придвигают двухколесную тележку 15 к контроли- руемому изделию 35, после чего оператор занимает свое место на сидень 17, прижимая к полу опору 16 и этим препятствуя отходу в процессе контроля двухколесной тележки 15 от кон ролируемого изделия 35..
После этого с помощью блока 24 уравления включаются дефектоскоп 25, самописец 26, дефектоотметчик 31, телевизионная камера 32, видеоконтрольное устройство 33, корректор 29 и гидроцилиндр 9, шток 10 которого закрепленным на нем кронштейном 11 отодвигается от опорно-приводного ролика 8 на требуемое расстояние за счет выдвижения шлицевого конца 13 бесконечного ходового винта 2 из шлиц 23 опорно-приводного ролика 8.
Если контролируемый шов 37 распо- ложен по окружности контролируемого изделия 35, включают механизм вращения контролируемого изделия 35 (не показан), от вращения которого получают вращение опорно приводной ро- лик 8, которьш через бесконечный ходовой винт I2 передает возвратно- поступательное движение ходовой гайке 1 4 и жестко закрепленному на ней ультразвуковому преобразователю 4. В процессе контроля к ультразвуковому преобразователю 4 подается от бака 34 контактная жидкость (не показана) .
В случае, если сварной шов 37
расположен параллельно оси контролируемого изделия 36, включается реверсивный двигатель 6, который через верньерный узел 7 перемещает карет- ку 3 по направляющим 5, производя контроль аналогично изложенному.При наличии дефекта, последний отмечается дефектоотметчиком 3, одновременно расстояние от точки начала отсче- та отличается с помощью связанного
с опорно-приводным роликом 8 ка 30 расстояния.
Формула изобретения
Передвижная установка для ультразвукового контроля изделий, содержащая передвижную Платформу, смонтированную на ней подъемную стрелу, размещенную на свободном конце стрелы каретку с преобразователем и приспособление для стабилизации положения преобразователя на контролируемом изделии, о тличающая- с я тем, что, с целью повьш1ения технологических возможностей контроля, она снабжена размещенными на свободном конце стрелы перпендикулярно ее оси направляющи и, установленными на них реверсивны двигателем с верньерным узлом перемещения каретки, установленным на ней свободновращающим- ся опорно-приводньгм роликом, гидроцилиндром со штоком, соединенным со штоком кронштейном, соединенным с кронштейном с возможностью вращения бесконечным ходовым винтом со шлице- Бым концом, и установленной на ходо- вом винте ходовой гайкой, передвижная платформа выполнена в виде перемещаемой вручную двухколесной тележки с жестко прикрепленными к ней опорой и сиденьем оператора, подъемная стрела выполнена в виде шарнирно прикрепленной к тележке раздвижной телескопической рамки с механизмом ее ; подъема, приспособление для стабилизации положения преобразователя на контролируемом изделии выполнено в виде жестко соединенной с тележкой стойки, жестко соединенного с ней направляющего стакана и вставленной в него пружины, жестко соединенной со стаканом и с раздвижной телескопической рамкой, поверхность опорно-приводного ролика выполнена из резины, а по оси ролика выполнены шлицы для скользящего соединения со шлицевым концом бесконечного ходового винта, при этом преобразователь жестко соединен с ходовой гайкой.
f.i
S2
17
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвуковогоКОНТРОля | 1979 |
|
SU832463A1 |
| Установка для ультразвукового контроля изделий | 1987 |
|
SU1557515A1 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| Устройство для ультразвукового контроля цилиндрических изделий со стороны наружной поверхности | 1985 |
|
SU1365913A1 |
| МАШИНА ДЛЯ ВЫГРУЗКИ ИЗ КРЫТЫХ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU231374A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Стенд рентгенотелевизионного контроля цилиндрических сварных изделий | 1975 |
|
SU811994A1 |
| Устройство для неразрушающего контроля изделий | 1986 |
|
SU1388787A1 |
| Акустический блок для ультразвукового контроля изделий | 1984 |
|
SU1241125A1 |

Изобретение относится к технике ультразвукового контроля иэделнй. Цель изобретения - повышение технологических возможностей контроля - достигается за счет изготовления передвижной платформы в виде перемещаемой вручную двухколесной тележки, по установленным на свободном конце стрелы которой по направляющим с помощью реверсивного двигателя и верньерного узла перемещается каретка с закрепленным на нем опорно-приводным роликом, от которого через соединен- нь1й с ним бесконечный ходовой винт передается возвратно-поступательное движение ходовой гайки и закрепленному на ней ультразвуковому преобразователю за счет соединения ходового винта с помощью его шлицевого конца со шлицами ролика, который получает вращение от контакта с контролируемым изделием. 3 ил. Q S 4 СП 00
32
фиг.2
37 2Ъ
;i
т/
#,
i
.3
Редактор А.Гулько
Составитель JL,Блохин Техред Л.Олейник
Заказ 2560/50Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
но делам изобретений и открытий 1 13035, Москва, Ж-35, Раутцская наб., д.4/5
Производственно-полиграфическое 1 редприятие., г.Ужгород, ул .Проектная, 4
Корректор Г.Решетник
| Устройство для контроля сварных соединений изделий цилиндрической формы | 1973 |
|
SU466445A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
