Изобретение относится к системам автоматического регулирования и может быть использовано в следящем гидравлическом приводе.
Цель изобретения - повышение качества регулирования и упрощение конструкции регулятора за счет конструирования его в виде нелинейного устройства, изменяющего свои характеристики в зависимости от величины сигнала ошибки и.обладающего многообразием фунциональных возможностей в зависимости от настроек,,
На чертеже представлена блок-схема регулятора.
Регулятор содержит сумматор 1, инверторы 2 и 3, нелинейньш элемент типа зона нечувствительности 4, блоки масштабирования 5 и 6, датчик сигнала ошибки 7. ,
Регулятор работает следующим образом.
Три операционных усилителя, на которых построены сумматор 1 и инверторы 2 и 3, соединенные последователь-ЗЗ ментгшьно.
но и охваченные отрицательной обратной связью при определенном контурном коэффициенте передачи, составляют колебательный контур в диапазоне частот 2-3 кГц, Это происходит по- 30 фективно использовать его в качестве
тому, что операционный усилитех ь является инерционным звеном с малой постоянной времени и -последовательное соединение трех операционных усилителей с охватом их отрицательной обратной связью можно рассматривать как соединение трех апериодических звеньев, способных составить колебательный контур, находящийся на колебательной границе устойчивости при определенном контурном коэффициенте усиления.
Для того, чтобы автоколебания стали устойчивыми, в отрицательную обратную связь регулятора введен нелиней- ный элемент типа зона нечувствитель- .ности 4, построенный с использованием двух встречно включенных диодов
Блоки 1 и 2 охвачены и положительной обратной связью, глубина которой регулируется с помощью блока масштабирования 6. Действие положительной обратной связи эквивалентно увеличе- нию Постоянной времени инерционного звена и соответственно уменьшению частоты генерируемых колебаний, в рассматриваемом устройстве примерно до частоты, равной 300-400 Гц, при
емлекой для восприятия объектом регулирования. К тому же положительная сбратн ая связь осуществляет стабилизацию амплитуды.
Одной из особенностей генератора является свойство изменять при подаче на вход сумматора 1 напряжения величину, частоту и фазу генерируемых колебаний. Причем в каждом диапазоне частот, определяемом настраива- емымк с помощью блоков масштабирования 5 и 6 коэффициентами, имеется несколько состояний равновесия, характеризуемых своей частотой, амплиту- 5 дои колебаний, их формой или наличием импульсов определенной длительности и амплитуды. Переход в новое состояние равновесия происходит при достижении входным напряжением определенного значения. Другой особенностью генератора является его дифференцирующее свойство, возникающее при определенной настройке блоков масштабирования, осуществляемой экспери0
Перечисленные свойства данного регулятора с учетом простоты его конструкции и многообразия функциональных возможностей позволило эф
регулятора для формирования управляющего воздействия в следящих системах с целью повьш1ения быстродействия и качества регулирования.
Формула изобретения
Нелинейньй регулятор, содержаш 1й сумматор, соединенный первым входом с выходом датчика сигнала ошибки, а выходом - с входом инвертора, отличающийся тем, что, с целью улучшения качества регулирования и упрощения конструкции регулятора, в него введены последовательно соединенные второй инвертор, нелинейный элемент типа зона нечувствительности и блок масштабирования, а также второй .блок масштабирования, причем выход первого инвертора, являю- шдйся инвертирующим выходом регулятора, соединен с входом второго блока, масштабирования и входом второго инвертора, выход которого является неинвертирующим выходом регулятора, а выходы блоков масштабирования соединены соответственно с вторым и третьим входами сумматора.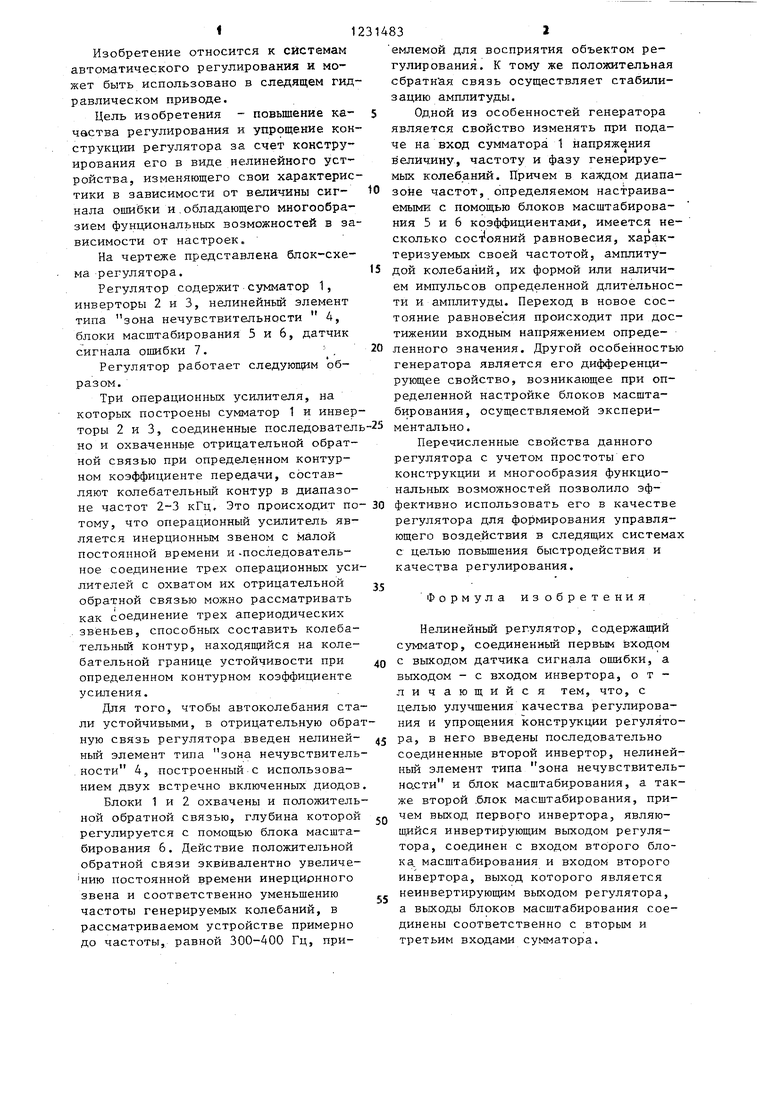
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Устройство для регулирования производительности винтового компрессора | 1979 |
|
SU779982A1 |
Нелинейный регулятор может быть использован в системах автоматического управления, в частности для управления гидравлическим приводом. Регулятор построен в виде нелинейного устройства, изменяющего свои характеристики в зависимости от величины сигнала ошибки. В зависимости от настроек устройство обладает многообразием функциональных характеристик такими, как форсирующие свойства при определенном уровне ошибки, релейные свойства, пosвoляюшJ e организовать скользящие режимы регулирования и др. Свойства регулятора исследованы экспериментально. 1 ил. го со 4 00 со
Составитель Ю. Сагалов Редактор И. Сегляник Техред Л.Олейник .
Заказ 2562/51 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И. Муска
| Регулятор с переменной структурой | 1977 |
|
SU629525A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| , Авторское свидетельство СССР № 894673, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
