2. Схват по п.1, о т л и ч щ и и с я те1,что губки снабжены
1234182
а ю - скалками и механизмом их фиксации, размещенным в корпусе.
Изобретение относится к машиностроению и касается, в частности, создания роботов, манипуляторов, а также может быть использовано и в других отраслях промышленности.
Цель изобретения - повышение надежности зажима детали неправильной формы.
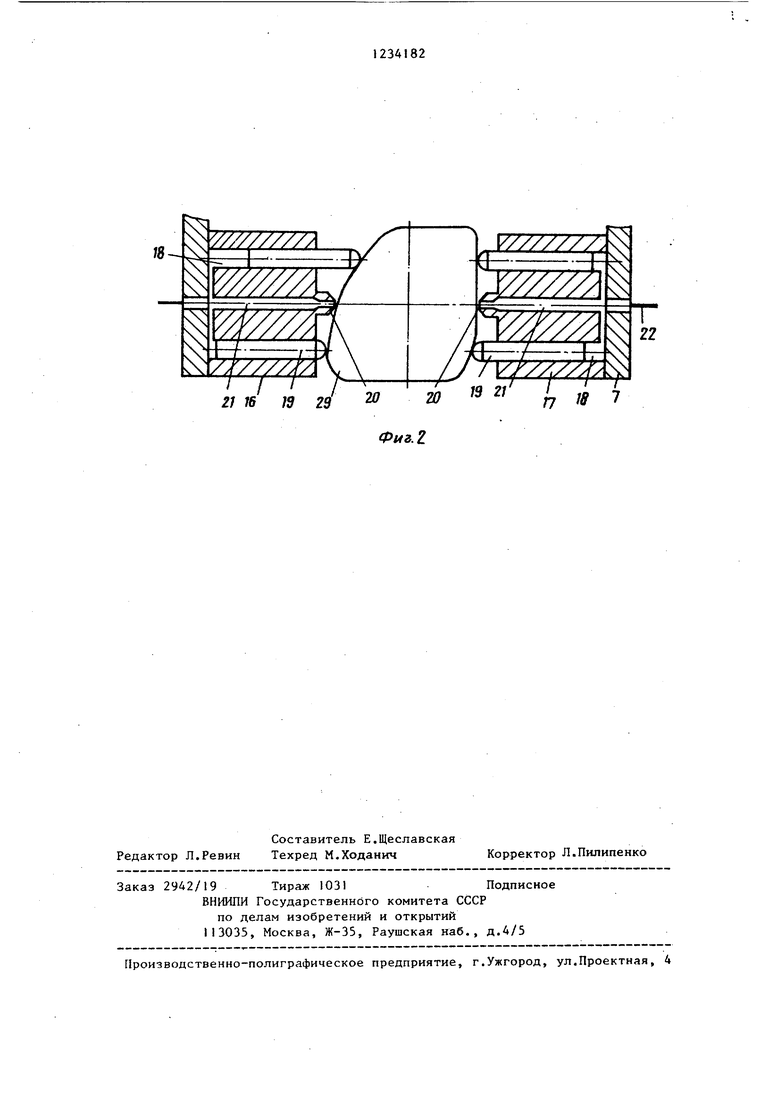
На фиг. 1 изображен схват манипулятора, общий вид, в разрезе; на фиг, 2 - пример зажима предмета неправильной формы.
Схват манипулятора содержит корпус 1, в котором вьтолнены два силовых цилиндра 2 и 3 с поршнями 4 и 5. Штоки поршней 4 и 5 закреплены в рычагах 6 и 7 с установленными в них скалками 8 и 9. Скалки проходят через цанги 0 и П, на конусной части которых установлены поршни 12 и 13. Пружинами 14 и 15 поршни постоянно отжимаются от цанг 10 и 11. На нижних концах рычагов 6 и 7 закреплены губки 16 и 17. В губках выполнены цилиндрические полости 18, в которых установлены рабочие стержни l9 В средней части губок 16 и 17 установ лены калиброванные сопла 20, которые каналом 21 соединены с цилиндрическими полостями 18 и трубопроводом 22 с поршневыми полостями цилиндров 2 и 3. От источника питания сжатый воздух подают через дроссели 23 и 24 в поршневые полости цилиндров 2 и 3 и через дроссели 25 и 26 в штоковые полости цилиндров 2 и 3, которые через регулируемые дроссели 27 и 28 соединены с. атмосферой. Захватываемый пред Met 29 зажимается и удерживается рабочими стержнями I9.
Схват манипулятора работает следующим образом.
Сжатый воздух постоянно подают через дроссели 23 и 24 в поршневые полости цилиндров 2 и 3. Давление в этих полостях определяется сопротивлением дросселей 23 и 24 и сопротивлением истечению воздуха из сопел 20. Под давлением воздуха поршни 4 и 5 выдвигаются, а губки 16 и 17 разводятся. При подводе схвата к захватываемому предмету подают воздух в штоковые полости цилиндров 2 и 3. Давление в штоковых полостях определяется соответственно сопротивлением дросселей 25 и 27 и 26 и 28. При свободном
истечении воздуха из сопел 20 давление в поршневых полостях цилиндров 2 и 3 значительно меньше, чем в штоковых, и поршни 4 и 5 вместе с рычагами 6 и 7 и губками 16 и 17 перемещаются к центру. При подходе губок 16 и 17 к предмету 29 рабочие стержни 19 касаются его поверхности и перемещаются в цилиндрических полостях 18, При приближении сопел 20 к
поверхности предмета увеличивается сопротивление истечению воздуха и, следовательно, повышается давление в поршневых полостях цилиндров 2 и 3 и цилиндрических полостях 18 губок,
Повьш1ение давления обеспечивает за- . жим предмета 29 рабочими стержнями 19, Одновременно происходит выравнивание сил, действуюпшх на поршни 4 и 5, и их движение прекращается. Величину зажимного усилия предварительно настраивают изменением проводимости дросселей 26 и 28, Затем подаются сжатый воздух под поршни 12 и J 3, которые, перемещаясь, зажимают цанги 10 и 11, фиксируя скалки В и 9, а следовательно, и губки 16 и 17 в рабочем положении. Далее происходит перенос захватываемого предмета 29, Перемещение поршней 4 и 5 происходит
независимо друг от друга, а их фиксация после зажима детали обеспечивает захват и перенос асимметричных предметов с сохранением положения их оси. Для разжима отключают подачу воздуха в штоковые полости цилиндров 2 и 3, За счет давления в поршневых полостях поршни 4 и 5 выдвигаются и ;:хват готов к новой операции.
18
У////////Л
тт
YJ//7///.
/ / / . f/ /б /3 29
у///////.
У/////
1/
%7Г77;7Г У
/к// ;/г/ГА
/, / 7
22
Фиъ.1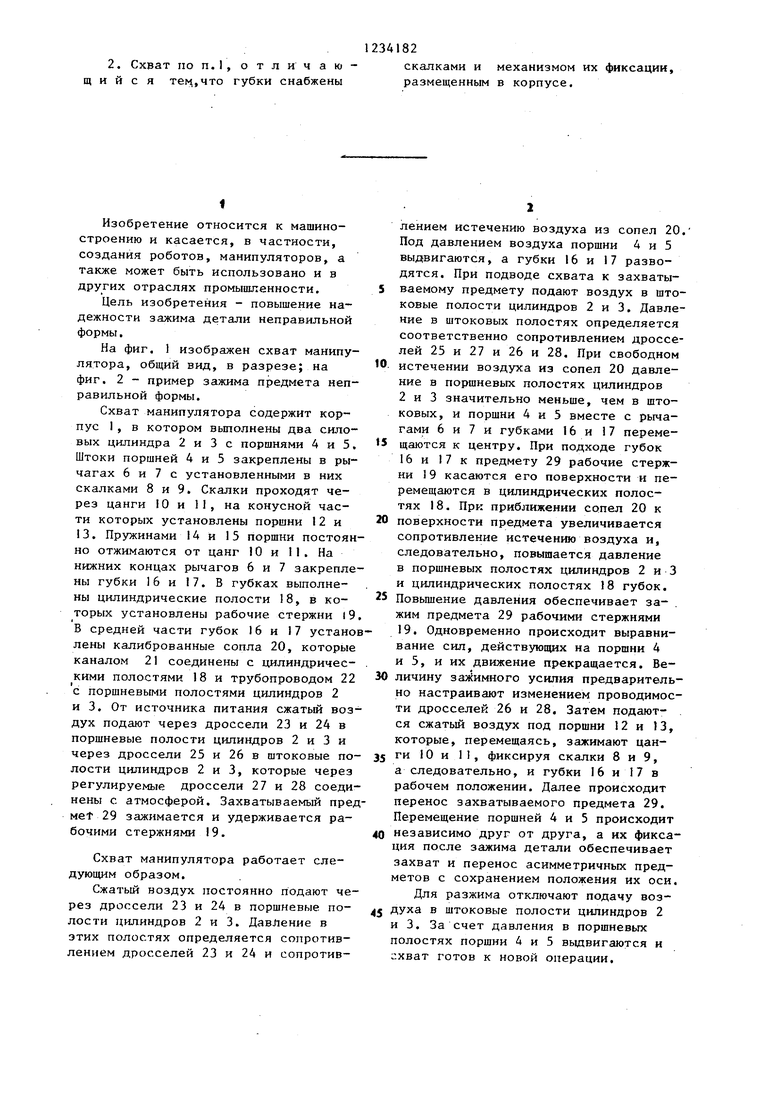
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Захват манипулятора | 1978 |
|
SU770788A2 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Манипулятор | 1983 |
|
SU1151452A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Схват манипулятора | 1983 |
|
SU1110627A1 |
