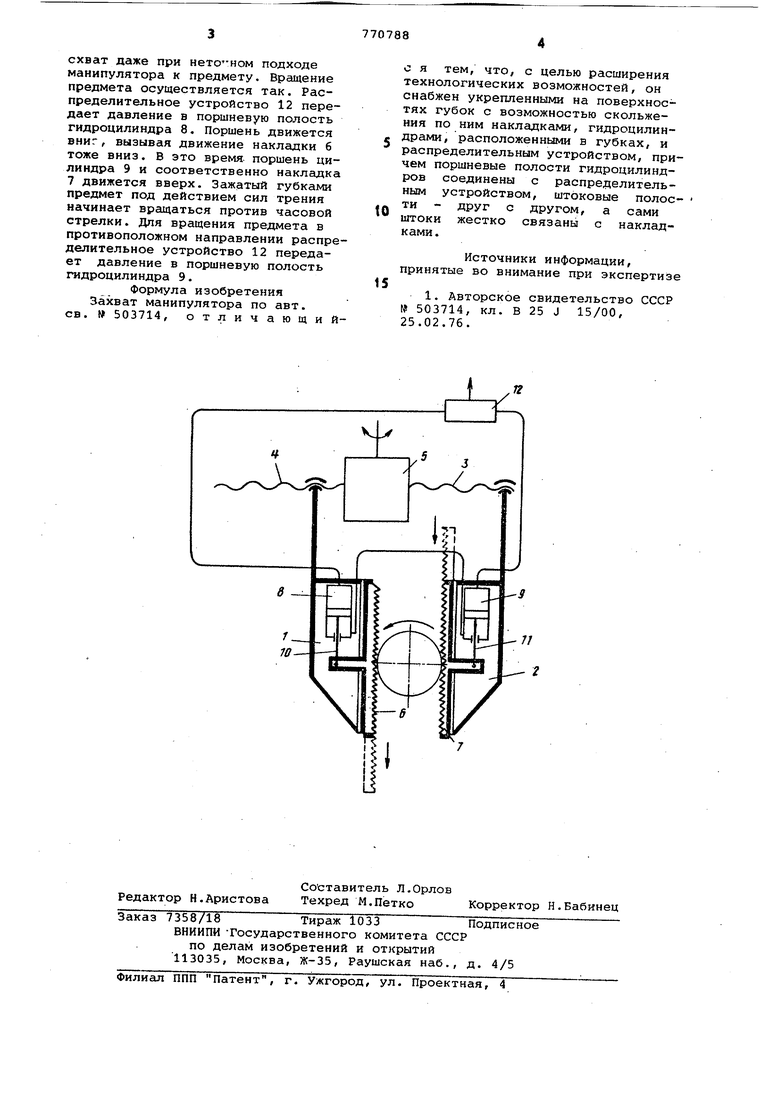
Изобретение относится к грузозахватным устройствам и быть использовано, например, в дистанционных манипуляторах, где необходимо осуществить точный схват и вра щение предметов. Известен захват по основному авт св. № 503714, содержащий губки и пр вод с дифференциальным механизмом, причем выходные полуоси дифференциального механизма кинематически связаны с губками захвата l. Однако, если после схвата предмета возникает необходимость его по ворота, то посредством такого захва та эту технологическую операцию не осуществить вследствие возможного несовпадения осей предмета и кисти манипулятора. Целью изобретения является расширение технологических возможносте захвата. Для достижения этого он снабжен укрепленными на поверхностях губок с возможностью скольжения по ним наклсщками, гидроцилиндрами, расположенными в губках, и распределительным устройством, причем поршневые полости гидроцилиндров соединены с распределительным устройством, штоко.вые полости - друг с другом, а сами штоки жестко связаны с накладками. На чертеже изображена кинематическая схема предлагаемого захвата. Захват включает в себя губки 1 и 2, кинематически связанные с выходными полуосями 3 и 4 дифференциального механизма 5 привода. Губки снабжены накладками 6 и 7, которые могут скользить вдоль их поверхностей . Внутри губок размещены гидроцилиндры 8 и 9, штоки 10 и 11 которых жестко соединены с накладками. Поршневые полости г дроцилиндров соединены с распределительным устройством 12, а штоковые их полоски соединены между собой. Благодаря такому соединению при движении поршня цилиндра 8 вниз поршень цилиндра 9 будет двигаться вверх. Работает захват следующим образом. Под действием.привода губки 1, 2 движутся навстречу друг другу и осуществляют схват предмета. Наличие дифференциального механизма 5 позволяет осуществлять надежный
схват даже при неточном подходе манипулятора к предмету. Вращение предмета осуществляется так. Распределительное устройство 12 передает давление в поршневую полость гидроцилиндра 8. Поршень движется вниг, вызывая движение накладки 6 тоже вниз. В это время поршень цилиндра 9 и соответственно накладка 7 движется вверх. Зажатый губками предмет под действием сил трения начинает вращаться против часовой стрелки. Для вращения предмета в противоположном направлении распределительное устройство 12 передает давление в поршневую полость гидроцилиндра 9.
Формула изобретения Захват манипулятора по авт. св. № 503714, отличающис я тем, что, с целью расширения технологических возможностей, он снабжен укрепленными на поверхностях губок с возможностью скольжения по ним накладками, гидроцилиндрами, расположенньлми в губках, и распределительным устройством, причем поршневые полости гидроцилиндров соединены с распределительным устройством, штоковые полости - друг с другом, а сами штоки жестко связаны с накладками.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 503714, кл. В 25 J 15/00, 25.02.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Захват манипулятора | 1974 |
|
SU503714A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват манипулятора | 1984 |
|
SU1234182A1 |
| Захват очуствленного манипулятора | 1978 |
|
SU709357A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Захватное устройство манипулятора | 1990 |
|
SU1756146A1 |
