Изобретение относится к автоматизации прокатного производства, а именно к устройствам автоматического контроля износа измерительных роликов.
Целью изобретения является повышение точности измерения диаметра измерительного ролика и определения его износа..
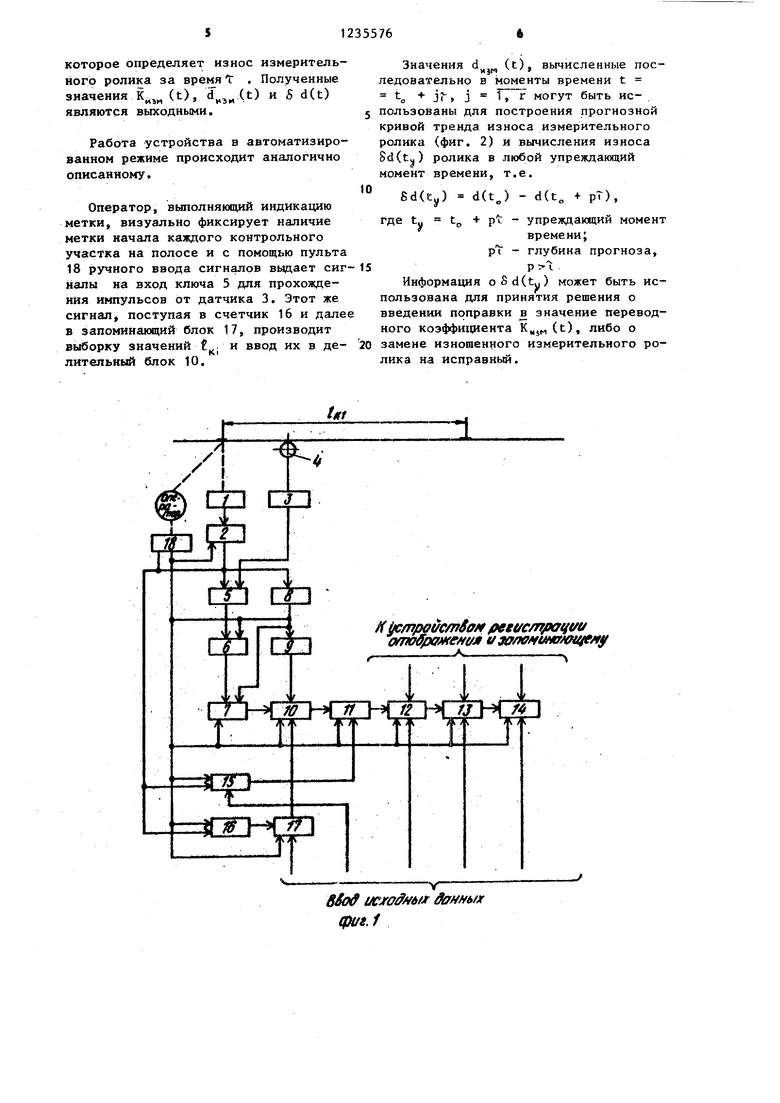
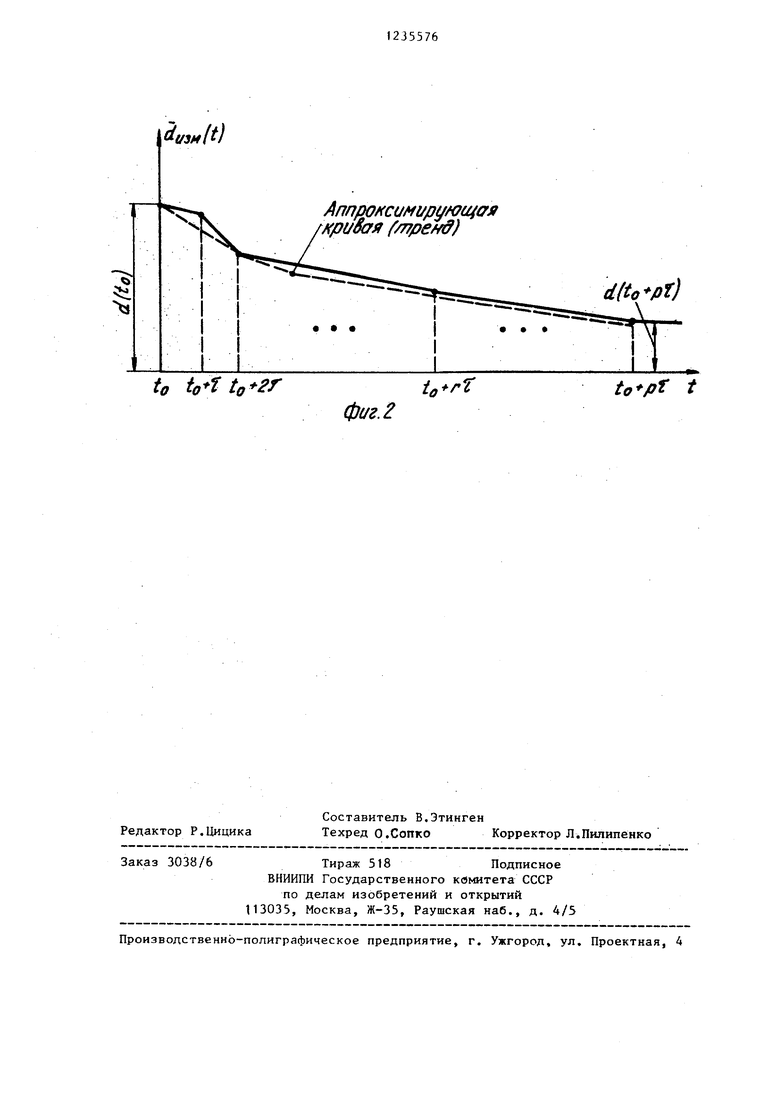
На фиг. 1 показана блок-схема устройства автоматического контроля износа измерительных роликов; на фиг. 2 - кривая износа измерительного ролика.
Устройство содержит индикатор 1 метки, триггер 2, датчик 3 импульсов измерительный ролик 4, ключ 5, счетчик 6 импульсов, регистр 7, элемент НЕ 8, элемент 9 задержки, первьй делительный блок 10, накапливающий сумматор 11, второй делительный блок 12, множительный блок 13, вычитающий сумматор 14, реверсивный счетчик 15 с уставкой, суммирующий счетчик 16, запоминакиций блок 17 и пульт 18 ручного ввода сигналов, причем, выхо индикатора 1 метки соединен с первым входом триггера 2, выход триггера 2 соединен с входом элемента НЕ 8 и с первым входом ключа 5, с которым также соединен первый выход пульта 18 ручного ввода сигналов. Второй вход ключа 5 соединен с выходом датчика 3 импульсов, механически связанного с измерительным роликом 4. Выход ключа 5 соединен с первым входом счетчика 6 импульсов, второй вход которого соединен с выходом элемента НЕ 8 и вторым выходом пульта 18 ручкого ввода сигналов. Выход счетчика 6 импульсов соединен с первым входом регистра 7, второй вход регистра 7 соединен с выходом элемента НЕ 8, выход регистра 7 соединен с первым входом первого делительного блока 10, Второй вход первого делительного блока 10 соединен с выходом элемента 9 задержки, вход которого соединен с выходом элемента НЕ 8, третий вход первого делительного блока 10 соединен с выходом запоминаьщего блока 17. Первьй вход запоминакмдего блока 17 соединен с выходом суммирующего счетчика 16, первьй вход которого соединен с выходом триггера 2 и с первым выходом пульта 18 ручного ввода сигналов. Выход первого делительного блока 10 соединен с первым вхо355762
дом накапливающего сумматора 11, второй вход которого собдинен с выходом реверсивного счетчика 15 с уставкой, первый вход реверсивного . счетчика 15 соединен с выходом триггера 2 и с первым выходом пульта 18 ручного ввода сигналов. Выход накапливающего сумматора 11 соединен с первым входом второго делительного Q блока 12, выход которого соединен с первым входом множительного блока 13, выход множительного блока 13 соединен с первым входом вычитающего сумматора 14. Второй вход триггера 2, |, третий вход регистра 7, четвертый вход первого делительного блока 10, третий вход накапливающего сумматора 1 1 , вторые входы второго делительного блока 12, множительного блока - 13, вычитакнцего сумматора 14, а также реверсивного счетчика 15 с уставкой, суммирующего счетчика 16 и запоминающего блока 17 соединены с вторым выходом пульта 18 ручного вво- 25 да сигналов.
Устройство работает следующим образом-.
Принцип действия устройства основан на подсчете количества Nц,j импульсов на выходе датчика 3 импульсов при прохождении контрольного (образцового) участка Т. полосы и последующем пересчете его в переводной коэффициент К и диаметр ролика о по соотношениям:
0
5
К
к
1 /N
0
к|
.-L ™ Ь
К-п
к. .
где г,.
- длина контрольного (образцового) участка полосы, измеренная с заданной погрешностью,
N - количество импульсов, полученное на выходе датчика 3 импульсов прн прохожде- НИИ i-ro участка полосы.
Предварительно оператор с помощью пульта 18 ручного ввода сигналов производит обнуление триггера 2, счетчика 6 импульсов, регистра 7, первого и второго делительных блоков 10 и 12, накапливающего сумматора 11, множительного блока 13, вычитаю- шегп сумматора 14, реверсивного счетчика 15 с уставкой, суммнрующех о счетчика 16 и запоминающего блока 17
Затем осуществляется ввод исходных данных: в запоминающий блок 17 заносится m значений длин t, f , ..., fj контрольных (образцовых; участков полосы, в реверсивный счетчик 15 и второй делительный блок 12 заносится значение га, в множительный блок 13 вводится значение п/п и в накапливающий сумматор 11 значение d(tj.
В процессе движения полосы при прохождении метки начала первого контрольнога участка индикатор 1 мет ки вырабатьшает импульсы, переводящие триггер 2 в состояние 1. Этот импульс производит запись 1 в суммирующий счетчик 16, По этому зиаче- нию производится выборка из запоми- нающего блока 17 первого значения 1ц и ввод этого значения в первый делительный блок 10. С приходом этого же импульса ключ 5 начинает пропускать импульсы от датчика 3 им- пульсов, соединенного с измерительным роликом. Количество N импульсов, поступившее в счетчик 6 за время прохождения первого контрольного участка полосы, заносится в регистр 7
При прохождении метки конца первого участка f, триггер 2 перебрасывается в состояние О. При этом элемент НЕ 8 вырабатьшает сигнал, по которому производится обнуление счет чика 6 и считывание информагщи с регистра 7. Содержимое i
ИЗМ 1
регистра
7 поступает в первый делительный блок 10, где реализуется вычисление первого переводного коэффициента по соотношению
К
K,/N«3.i
которое затем поступает в накапливающий сумматор 11.
Через время задержки tj , которое должно удовлетворять условию:
rv.
где ТГдр - время вьтолнения операции
деления,
элемент 9 задержки вьщает сигнал обнуления в первый делительный блок 10
При прохождении метки начала второго контрольного участка длиной t срабатывает индикатор 1 метки, триггер 2 снова перебрасывается в состояние 1.
Содержимое Суммирующего счетчика 16 увеличивается на единицу и получает значение 10, по которому производится выборка из запоминающего блока 17 значения t длины второго контрольного участка и ввод его в делительный блок 10 в качестве делимого. С приходом этого же сигнала ключ 5 разрешает прохождение импульсов от датчика 3 импульсов, и на счетчике 6 после прохождения второго контрольного участка накапливается значение N. , т.е. количество имИ 6М J
пульсов, соответствующее длине t, которое также передается в регистр 7. При прохождении метки конца второго контрольного участка триггер 2 перебрасывается в О, сигнал с выхода элемента 8 производит обнуление счетчика 6 и перепись содержимого регистра 7 в виде делителя N.« . в деnJWT.
лительный блок 10, в котором также после выполнения операции деления образуется значение
К
Изма
1 И5мг
которое передается в накапливающий сумматор 11, после чего делительный блок 10 обнуляется сигналом с выхода элемента .9 задержки через время t . В накапливающем сумматоре 11 при этом образуется сумма (К,., +
- Эг1 f
+ намг прохождении следующих контрольных участков процесс накопления значений К повторяется, После прохождения га-го контрольного участка реверсивный счетчик 15 вьщает сигнал переписи содержимого сум
матора 11 в виде суммы в делительный блок 12, ся значение
(t
ZIK
1
ИЬМ I
(t),
которое затем передается в множительный блок 13 для выполнения операции по соотношению
dHjt(t)
К„.,, (t).n
IT
Это значение поступает в вычитающий сумматор 14, где выполняется операция вычисления разности между диаметром d(ta) исправного 21змерительно- го ррлика 4 и диаметром ё,„ (t), полученным в результате измерения и вычисления диаметра в данный момент времени t t +
dCt) d(tj - d,, (t).
которое определяет износ измерительного ролика за время Т . Полученные значения К.„ (t), d, (t) и S d(t) являются выходными.
Работа устройства в автоматизированном режиме происходит аналогично описанному.
Оператор, ВЕЛЮЛНЯЮСЦИЙ индикацию метки, визуально фиксирует наличие метки начала каждого контрольного участка на полосе и с помощью пульта 18 ручного ввода сигналов выдает сиг- налы на вход ключа 5 для прохождения импульсов от датчика 3. Этот же сигнал, поступая в счетчик 16 и далее в запоминающий блок 17, производит выборку значений и ввод их в де- лительный блок ТО.
Значения d (t), вычисленные последовательно в моменты времени t t j j П г могут быть использованы для построения прогнозной кривой тренда износа измерительного ролика (фиг. 2) и вьлчисления износа Sd(t) ролика в любой упреждающий момент времени, т.е.
Sd(tj) где tu t.
d(tj - d(t + рТ),
+ pt - упреждающий момент
времени; рТ - глубина прогноза,
Информация oSd(ty) может быть использована для принятия решения о введении поправки в значение переводного коэффициента KцJ„(t), либо о замене изношенного измерительного роика на исправный.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система вычисления теоретической массы движущейся полосы | 1984 |
|
SU1235575A1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИЗНОСА ИЗМЕРИТЕЛЬНОГО РОЛИКА | 2003 |
|
RU2231407C1 |
| МНОЖИТЕЛЬНО-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2210102C1 |
| Система автоматического управления непрерывным агрегатом для обработки рулонов | 1988 |
|
SU1639817A1 |
| Устройство для воспроизведения переменных во времени коэффициентов | 1981 |
|
SU1005087A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Цифровой коррелятор | 1980 |
|
SU894719A1 |
| Функциональный преобразователь | 1983 |
|
SU1136154A1 |
| Устройство для программного управления с самоконтролем | 1983 |
|
SU1130832A1 |
| Устройство для программного управления | 1981 |
|
SU987579A1 |
Кl/cfljpoffC/n6o/« /fett/c/ryxftivt/ (TJOffpffMfffffvM и xr/HffftMBVfftifefty
---V
Sfoff UCJroff bff
фиг. f
dy3M It)
Аппро/ сим1/р1/ющс7я rffpuSffjt f/77pem
)
to
фиг. 2
Редактор Р.Цицика
Составитель В.Этинген
Техред О.Сопко Корректор Л.Пилипенко
3038/6
Тираж 518Подписное
ВНИИПИ Государственного квмитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
t
| Устройство для управления моталкой прокатного стана | 1981 |
|
SU984533A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство регулирования положения измерительного облика датчиков натяжения и формы движущейся полосы | 1981 |
|
SU992107A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
