() УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ИЗМЕРИТЕЛЬНОГО РОЛИКА ДАТЧИКОВ НАТЯЖЕНИЯ И ФОРМЫ ДВИЖУЩЕЙСЯ ПОЛОСЫ
1
Изобретение относится к области автоматизации прокатных станов, а именно к системам регулирований профиля, формы и натяжения полосы и может быть использовано на станах холодной и горячей прокатки.
Известно устройство измерения натяжения и формы полосы при прокатке, в котором измерение натяжения пол«эсы производится при помощи измерительного ролика. В теле ролика у его поверхности расположены магнитоупругие элементы, соединенные с кольцевыми шинами. С шинами связан источник магнитного потока. Параллельно с линией питания магнито ругих элементов включен шунт, состоящий из термистора и линейного резистора. Термистор и резистор зашунтированы общим уравновешивающим резистором. Термистор осуществляет температурную компенсацию измерителя 1 .
Недостатком устройства является механический износ измерительных роликов, что приводит к возникновению пограиности измерения натяжения и рценки формы полосы. Износ вызывает необходимость проведения дополнительных работ по настройке измерителя.
Известно также устройство измереНИЛ диаметров цилиндрических изделий, родержащее установленный, на измеряемом цилиндре импульсный ролик, связанный с датчиком измерительных импульсов, который подключен к счет- 1«1ку, кроме того, импульсный датчик оборотов цилиндра через блок задержки и триггер связан со счетчиком, выход счетчика подключен к сумматору, к второму входу которого-подключены корректирующие датчики, выход сумма тора через схему И и умножитель подается на счетчик f2j.
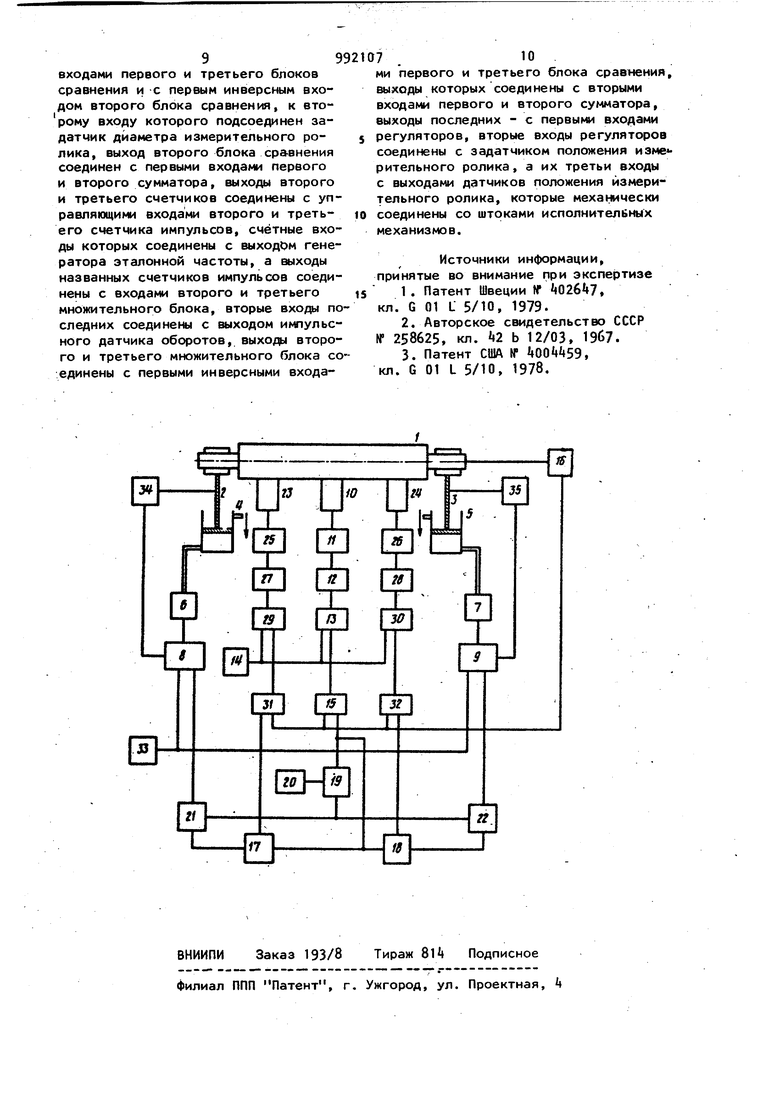
Такому устройству присуща недостаточная точность измерения диаметра цилиндра, вызванная небольшим количеством импульсов, выдаваемых датчиком измерительных импульсов. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство измерения натяжения и оценки формы полосы, содержащее раму, несущую исполнительный механизм, к которому присоединен через шток измерительный ролик. Ролик перемещается исполнительным механизмом так, что обеспечивает контакт ролика с полосой по всей ее ширине. Имеется также приспособление, устанавливающее ось ролика в фиксированное положение относительно данного положения полосы JJ3. Недостатками тпкого устройства являются погрешности в измерении натяжения и .в оценке формы полосы, вызван ные механическим износом поверхности измерительного ролика, а также радиальным температурным расширением его, что приводит к изменению положения контактной поверхности измерительного ролика относительно положения полосы и, тем самым, к ухудшению качественных показателей формы полосы в процес се их регулирования. Цель изобретения - повышение качес ва полосы за счет увеличения точности измерения натяжения и определения фор мы полосы с, Постравленная цель достигается тем, что в устройство, содержащее измерительный ролик, механически связанный со штоками исполнительных механизмов (например гидроцилиндров), которые входами через преобразователи подключены к выходам регуляторов, а также импульсный ролик, установленный без проскальзывания по середине измерительного ролика и соединенный через датчик измерительных импульсов с входом первого счетчика, импульсные ролики, установленные без проскальзывания по краям измерительного ролика и соединенные через датчики измерительных импульсов с входами второго и тре тьего счетчиков, импульсный датчик оборотов, механически соединенный с осью измерительного ролика, дополнительно введены счетчики импульсов, ге нератор эталонной частоты, множительные блоки, блоки сравнения, сумматоры, задатчик диаметра, задатчик положения, датчики положения, причем выход ггэрвого счетчика соединен с управляющим входом первого счетчика импульсов, с вторым входом которого соединен выход генератора эталонной частоты, а выход первого счетчика импульсов соединен с входом первого множительного блока, к второму входу последнего подсоединен выход импульсного датчика оборотов, выход первого множительного блока соединен с вторыми входами первого и третьего блоков сравнения и первым инверсным входом второго блока сравнения, к второму входу которого подсоединен задатчик диаметра, выход второго блока сравнения соединен с первыми входами первого и второго сумматора, выходы второго и третьего счетчиков соединены с управляющими входами второго и третьего счетчика импульсов, счетные входы которых соединены с выходом генератора эталонной частоты, а выходы названных счетчиков импульсов соединены с входами второго и третьего множительного блока, вторые входы последних соединены с выходом импульсного датчика оборотов, выходы второго и третьего множительного блока соединены с первыми инверсными входами первого и третьего блока сравнения, выходы которых соединены с вторыми входами первого и второго сумматора, выходы последних - с первыми входами соответствующих регуляторов, вторые входы регуляторов соединены с задатчиком положения, а третьи вхоы регуляторов соединены с выходами соответствующих датчиков положения, которые механически соединенл со штоками соответствующих исполнительных механизмов. Н чертеже представлена блок-схема устройства о Устройство регулирования положения измерительного ролика датчиков натяжения и формы движущейся полосы содержит измерительный ролик 1, механически связанный со штоками 2 и 3 исполнительных механизмов и 5, которые выходами через преобразователи 6 и 7 подключены к выходам регуляторов 8 и 9 а также импульсный ролик 10,установленный без проскальзывания по середине измерительного ролика 1, соединенный через датчик 11 измерительных импульсов и первый счетчик 12 с управляющим первого счетчика 13 импульсов, к счетному входу которого подключен выход генератора 1 i эталонной частоты, а выход счетчика 13 подсоединен к первому входу первого множительного блока 15,.к второму входу последнего подсоединен вь1ход импульсного датчика 16 оборотов, выход первого множительного блока 15 соеди нен с вторыми входами первого 17 и третьего 18 блоков сравнения с первы инверсным входом второго блока 19 сравнения, к второму входу которого подсоединен задатчик 20 диаметра измерительного ролика, а выходы подсоединены к первым входам первого 21 и второго 22 сумматоров. Кроме того, импульсные ролики 23 и 2k, установленные по краям измерительного ролика 1 и соединенные через датчики 25 и 26 измерительных импульсов и вторые 27 и третьи 28 счетчики с управляющими входами второго 29 и третьего 30 счетчиков импульсов, к счетным входам которых подключен выход генератора эталонной частоты, а выходы счетчиков 29 и 30 подсоединены соответственно к первым входам второго 31 и третьего 32 множительны блоков, к вторым входам последних по соединен выход импульсного датчика оборотов, выходы второго 31 и третьего 32 множительных блоков подcoe/v нены соответственно к первым инверсным входам блоков 17 и 18 сравнения, выходы которых подключены к вторым входам соответствующих сумматоров 21 и 22, выходы последних связаны с пер выми входами соответствующих регуляторов 8 и 9, к вторым входамих подключен задатчик 33 положения измерительного ролика, а к третьим входам выходы соответствующих датчиков 3 и 35 положения измерительного ролика, которые механически связаны со штоками 2 и 3 исполнительных механизмов и 5. Устройство работает следующим образом . Перед началом прокатки измеритель ный ролик 1 совместно с установленными на нем без проскальзывания им-, пульсными роликами 10, 23 и 2 находятся ниже линии прокатки. После заправки полосы в последующую клеть ил на моталку по команде от устройства наличия металла в валках последующей клети или от датчика тока привода мо талки (в зависимости от места расположения измерительных роликов 1 датчиков натяжения и формы полосы) подается сигнал из задатчика 33 положе ния измерительного ролика на вторые входы регуляторов 8 и 9. Выходной сигнал задатчика 33 поло жения характеризует заданное положение измерительного ролика 1, воздействующего на прокатываемую полосу с усилием, Соответствующим заданноиу натяжению. Под действием этого сигнала регуляторы 8 и 9 через преобразователи 6 и 7 воздействуют на исполнительные механизмы , 5 и вызывают перемещение их штоков 2 и 3. связанных с измерительным роликом 1. Датчики 3 и 35 положения, механически связанные со штоками 2 и 3 и определяющие положение измерительного ролика 1, вырабатывают сигналы отрицательной обратной связи по положению измеритель HQ го ролика 1 и подают их на третьи входы регуляторов 8 и 9. В результате, при прокатке поверхность измерительного ролика 1 находится на заданном уровне. В то же время установленные на измерительном ролике 1 без проскальзывания импульсные ролики 10, 23 И 2Ц механически связаны с датчиками 11, 25 л 26 измерительных импульсов, выдающими () импульсов за один оборот импульсных роликов 10, 23 и 24 на сметные входь счетчиков 12, 27 и 28, каждый с емкостью (2-1) импульсов. Датчики 11, 25 и 26 измерительных импульсов и счет1а1ки 12, 27,-28 представляют собой генераторы тактовых импульсов, каждый из которых вырабатывает один, импульс после полного оборота импульсных роликов 10, 23 и 2. Эти тактовые импульсы поступают на упраблякщие входы счетчиков 13, .29 и 30 импульсов, на счетные входы которых поступают импульсы с заданной частотой от стабильного генератора 14эталонной частоты. При появлении тактовых импульсов на управляю цих входах счетчиков 1 3 29 и 30 импульсов передним (зонтом тактовых и «1ульсов содержимое счетчиков 13 29 и 30 импульсов в виде кодов чисел, пропор(тональных времени оборота импульсных роликов 10, 23 и 2, передается в множительные блоки 15, 31 и 32, куда поступает информация от импульсного датчика 16 оборотов , характеризующая скорость измерительного ролика, содержимое вторых и третьих множительных блоков 31 и 32 в виде кодов чисел, пропорциональных диаметрам измерительного ролика 1 в местах, соответствующих установке импульсных роликов 23 и 2, поступает на первые инверсные входы первых блоков 17 и 18 сравнения,.на вторые входы которых поступает содержимое первого множительного (5лока 15 в кодов чисел, пропорциональных диаметру измерительного ролика 1 в месте установки импульсного ролина 10. На выходах первых блоков 17 и 18 сравнения появляются при отклонении текущего диаметра середины измерительного ролика 1 - D от текущего диаметра краев измерительного ролика 1 - , вызванные механическим износом и температурным расширением, сигналы, пропорциональные величине D(;-D|(., которые поступают на вторые входы сумматоров 21 и 22 соответственно. В то же время содержимое первого множительного блока 15 в виде кодов чисел, пропорциональных текущему диаметру 0(ч измерительного ролика В его середине, поступает на первый инверсный вход второго блока 19 срав нения, на второй вход которого в вид кодов чисел, пропорциональных заданному диаметру измерительного ролика 1, поступает информация из задатчика 20 диаметра. При отклонении текущего диаметра измерительного ролика 1, вызванного их механическим износом и температур ным расширением от заданного, опреде ляемого задатчиком 20 диаметра, на выходе второго блока 19 сравнения по является сигнал, пропорциональный величине D(..-D,, где Di - заданное значение диаметра измерительного рол ка 1, который прдается на первые вхо ды сумматоров 21 и 22 соответственно При механическом износе измерительного ролика 1 и его температурном расширении на выходах сумматоров 21 /и 22 появляются сигналы, пропорциональные величине (Dc-D,) + (,) , которые передаются на первые входы регуляторов 8 и 9. При этом регуляторы 8 и 9 так воздействуют через преобразователи 6 и 7 на исполнитель ные механизмы и 5, чтобы положение поверхности измерительного ролика 1 относительно линии проката было постоянным. Таким образом, применение предлагаемого устройства позволяет создавать необходимое натяжение полосы, а также- стабилизировать положение контактной поверхности измерительного р лика по линии прокатки на заданном уровне, компенсируя при этом механический износ и температурное расшире ние измерительного ролика, вследствие чего повышается точность в оценке формы движущейся полосы и в процессе еёрегулирования. Кроме того, за счет дополнительного введения счетчика импульсов,генератора высокой частоты и множительных блоков, повышается точность определения диаметра измерительного ролика. Экономическая эффективность от внедрения устройства регулирования положения измерительного ролика датчиков натяжения и формы движущейся полосы составляет 150 тыс.руб. Формула изобретения Устройство регулирования положения измерительного ролика датчиков натяжения и формы движущейся полосы, cor. держащее измерительный ролик, механически соединенный со штоками исполнительных механизмов, которые входами через преобразователи подсоединены к выходам регуляторов, а таюке импульсный ролик, установленный по середине измерительного ролика и соединенный через датчик измерительных импульсов с входом первого счетчика, импульсные ролики, установленные по краям измерительного ролика и соединенные через датчики измерительных импульсов с входами второго и третьего счетчиков, импульсный датчик оборотов, механически соединенный с осью измерительного ролика, отличаю-, щ е е с я тем, что, с целью повышения качества полосы за счет увеличения точности измерения натяжения и определения формы полосы, оно дополнительно содержит три счетчика импульсов, генератор эталонной частоты три множительных блока, три блока сравнения, два сумматора, задатчик диаметра измерительного ролика, задатчик положения измерительного ролика , два датчика положения измерительного ролика, причем выход первого счетчика соединен с управляющим входом первого счетчика импульсов. СО счетным входом которого соединен выход генератора эталонной частоты, а выход первого счетчика импульсов соединен с входом первого множительного блока, к второму входу последнего подсоединен выход импульсного датчика оборотов, выход первого множительного блока соединен с вторыми
входами первого и третьего блоков сравнения и с первым инверсным входом второго блока сравнения, к второму входу которого подсоединен задатчик диаметра измерительного ролика , выход второго блока сравнения соединен с первыми входами первого и второго сумматора, выходы второго и третьего счетчиков соединены с управляющими входами второго и третьего счетчика импульсов, счётные входы которых соединены с выходом генератора эталонной частоты, а выходы названных счетчиков импульсов соединены с входами второго и третьего множительного блока, вторые входы последних соединены с выходом импульсного датчика оборотов, выхода второго и третьего множительного блока соединены с первыми инверсными входами первого и третьего блока срав 1ения, выходы которых соединены с вторыми входами первого и второго сумматора, выходы последних - с первыми входами
регуляторов, вторые входы регуляторов соединены с задатчиком положения измерительного ролика, а их третьи входы с выходами датчиков положения измерительного ролика, которые механически
соединены со штоками исполнительных механизмов.
Источники информации, принятые во внимание при экспертизе 1 . Патент Швеции tf k026k71 кл. G 01 L 5/10, 1979.
2.Авторское свидетельство СССР Ve 258625, кл. 2 Ь 12/03, 1967.
3.Патент США Н , кл. G 01 L 5/10, 1978,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической стабилизации толщины полосы на прокатном стане | 1991 |
|
SU1784317A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |
| Линия для непрерывного изготовления обшивок панелей с перфорацией и поперечными периодически повторяющимися гофрами | 1987 |
|
SU1516365A1 |
| Устройство для регулирования натяжения полосы в башенной печи | 1983 |
|
SU1104176A1 |
| Система вычисления теоретической массы движущейся полосы | 1984 |
|
SU1235575A1 |
| Система автоматического регулирования профиля и формы полосы | 1980 |
|
SU942842A1 |
| Способ изготовления наружных обшивок для кровельных панелей с утеплителем и устройство для его осуществления | 1990 |
|
SU1784418A1 |
| Линия для непрерывного изготовления гофрированных полос | 1987 |
|
SU1496854A1 |
| Устройство компенсации влияния эксцентриситета прокатных валков | 1980 |
|
SU908455A1 |
