Изобретение относится к машиностроению и может быть использовано в промышленных роботах.
Целью изобретения является расширение функциональных возможностей за счет автоматической ликвидации несоосности траектории поступательного перемещения корпуса схвата и от заготовки после ее захвата.
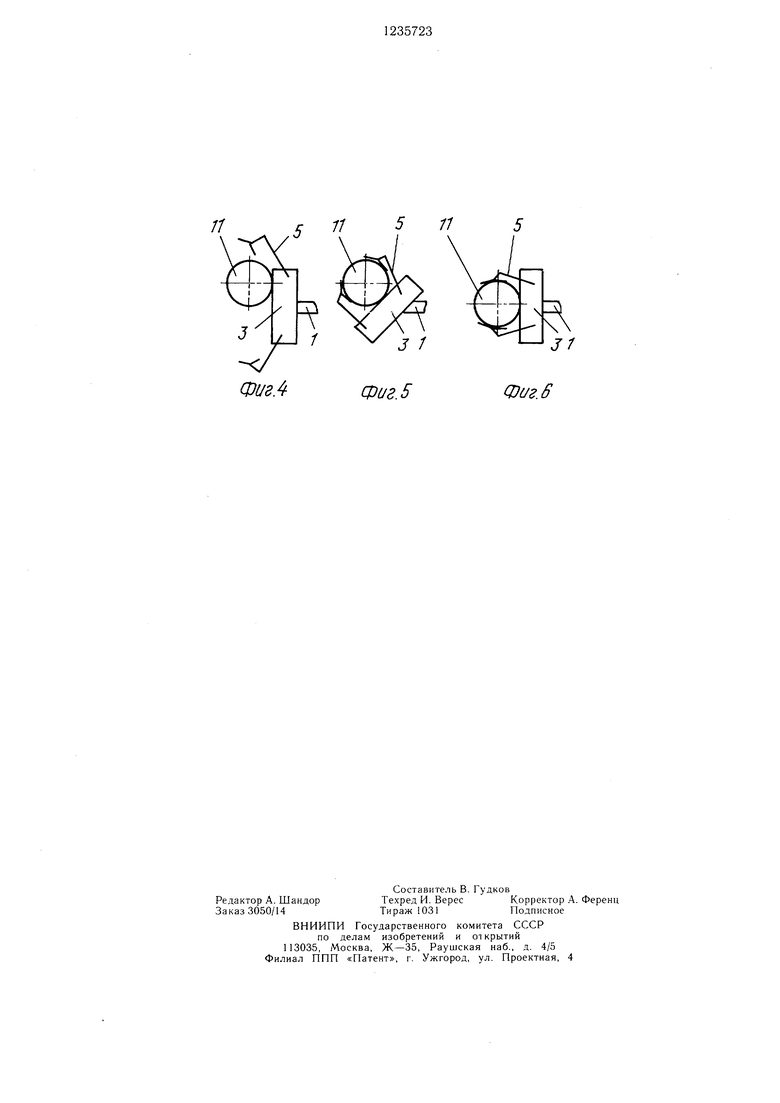
На фиг. 1 показан схват, вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - схема работы схвата при соприкосновении его с деталью; на фиг.5 - то же, в момент захвата детали; на фиг.6 - то же, при обратном ходе схвата.
Схват содержит корпус I, в котором установлена поворотная ось 2. На оси 2 жестко закреплено коромысло 3, на котором на осях 4 установлены рычаги 5 с приводом 6. В отверстии корпуса 1 установлена пружина 7 с шариком 8, выполняющая роль подпружиненного фиксатора. К корпусу 1 одним концом и к коромыслу 3 другим закреплены две пружины 9. На контактной поверхности коромысла 3 расположен контактный дат- захватываемая де
чик 10. Позиция таль.
Схват работает следующим образом.
Схват под действием привода перемещения (не показан) начинает движение навстречу детали П.. При несоосности детали и схвата последний касается детали 11 коромыслом 3. Так как схват продолжает движение, то деталь 11 воздействует на коромысло 3, разворачивает его вместе с поворот- .чой осью 2. Последняя надавливает на ща- рик 8, который устанавливается в корпусе 1 и сжимает пружину 7. Разворот коромысла
3продолжается до тех пор, пока деталь 11 не коснется контактного датчика 10, который
выдает команду на отключение привода перемещения схвата и включение привода 6. Привод 6 развернет рычаги 5 вокруг осей
4так, что рычаги захватят деталь II. После этого схват начинает движение назад. При этом создаваемый одной из пружин 9 вращающий момент действует на коромысло 3 таким образом, что последнее возвращается в исходное положение, в котором шарик 8 под действием пружины 7 фиксирует поворотную ось 2 с коромыслом 3. Деталь 11 зажата и сцентрирована со схватом (фиг.6).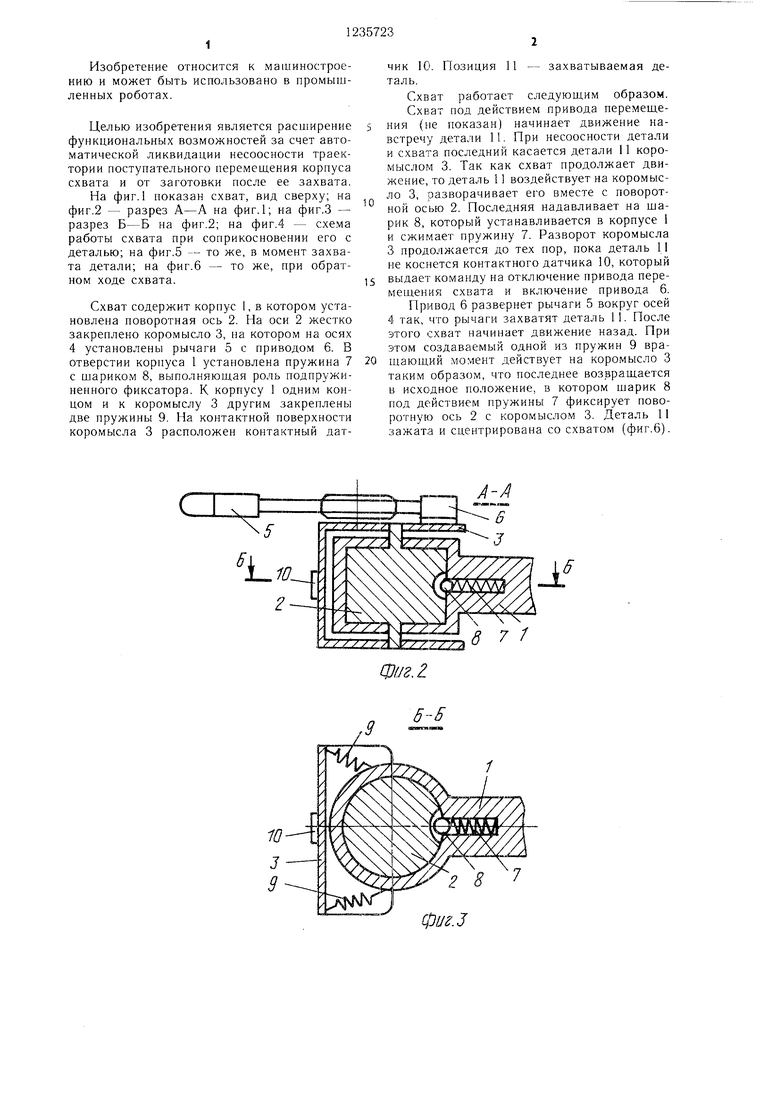
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Схват | 1983 |
|
SU1098790A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Схват | 1980 |
|
SU960009A1 |
| Схват робота | 1983 |
|
SU1117205A1 |
| Манипулятор | 1986 |
|
SU1400873A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Винтоверт | 1982 |
|
SU1030154A1 |
| Схват | 1982 |
|
SU1093543A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |

6
фиг. 2.
6-G
фиг.З
Фиг. 6
| Схват | 1980 |
|
SU960009A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
