Изобретение относится к машиностроению, в частности к механизации и автоматизации технологических процессов, связанных с погрузкой и разгрузкой тарно-штучных грузов..
Известен захват манипулятора, который имеет перемещающиеся плоскопараллельно губки I.
Недостатками этого захвата являются узкий диапазон перемещения губок и ненадежность обхвата деталей большого веса.
Наиболее близким к предлагаемому является схват, содержащий зажимные губки, связанные с корпусом и приводом рычагами шарнирных параллелограммов, и коромысла, соединенные шарнирно с серединой этих рычагов, а с корпусом таким образом, что центр их вращения расположен на прямой, проходящей через центры шарниров рычагов 2.
Однако известный схват не обеспечивает надежность обхвата при работе с деталями большого веса.
Цель изобретения - обеспечение надежности обхвата при работе с деталями большого веса.
Эта цель достигается тем, что схват, содержащий зажимные губки, связанные с корпусом и приводом рычагами шарнирных параллелограммов, и коромысла, соединенные шарнирно с серединой этих рычагов, а с корпусом таким образом, что центр и.х вращения расположен на прямой, проходящей через центры шарниров рычагов, снабжен смонтированными на каждой губке пружиной и зажимными элементами, выполненными в виде зубчатых секторов, находящихся в зацеплении, на одном из которых выполнен ограничительный зуб и смонтирован дополнительно введенный палец, установленный в плоскости, перпендикулярной плоскости перемещения губок, а другой зубчатый сектор жестко связан с пружиной.
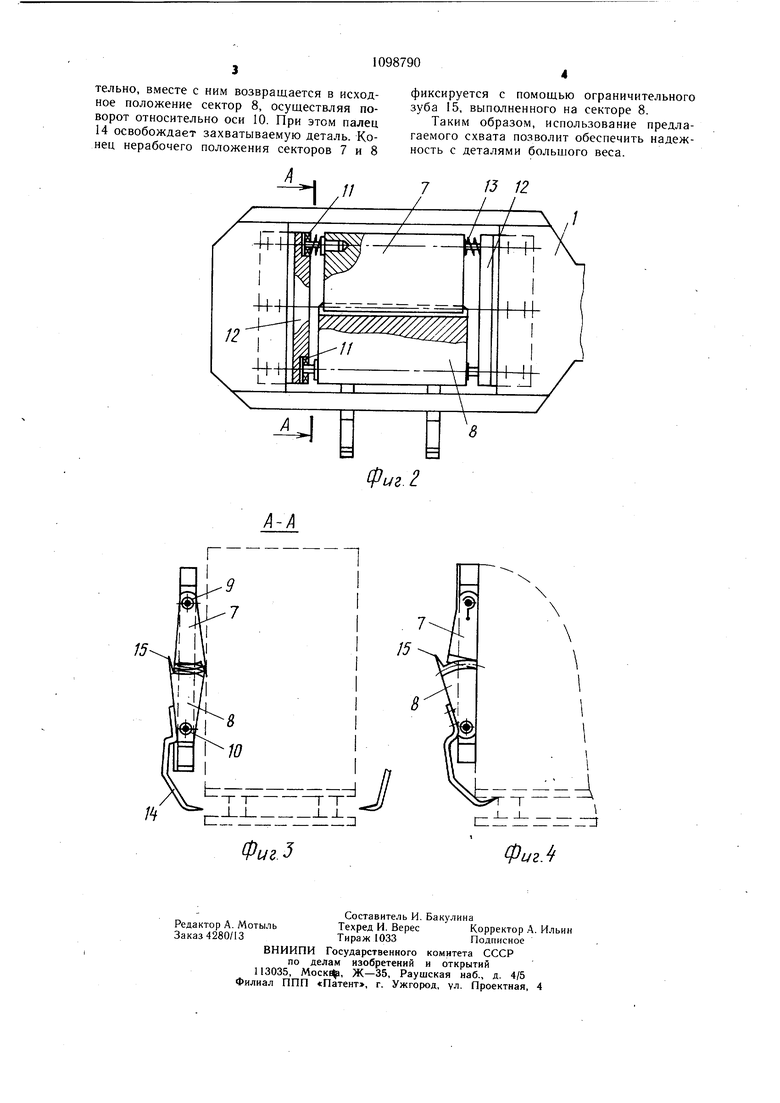
На фиг. 1 изображен схват, общий вид; на фиг. 2 - принципиальная схема сборки зубчатых секторов и кронштейнов на зажимпой губке; на фиг. 3 - разрез А-А на фиг. 2 (положение секторов до обхвата детали); на фиг. 4 - положение секторов после обхвата детали.
Схват состоит из зажимных губок 1, связанных с корпусом 2 и приводом , имеющим щток 3, двумя коромыслами 4 и двумя шарнирными параллелограммами, каждый из которых образован зажимной губкой 1, поворотными рычагами 5 и 6 и приводным штоком 3, общим для обоих параллелограммов. Коромысло 4 шарнирно соединено одним концом с серединой повороткого рычага 5, длина которого равна двум длинам коромысла, а другим - с корпусом 2. Шарниры коромысел 4 соосно закреплены на корпусе 2, а шарниры поворотных рычагов 5 и 6 соосно закреплены на штоке 3.
Зубчатые секторы 7 и 8 установлены с помощью осей 9 и 10 на подшипниках 11, закрепленных на двух кpoнпJтeйнax 12, размещенных по торцовой части зубчатых секторов. Эти кронштейны -жестко закреплены в прямоугольном окон.ном проеме каждой губки 1, выполненном для установки секторов 7 и 8 с кронп тей 1ями 12. Между зубчатым сектором 7 и кронштейном 12 установлена спиральная пружина 13 торционного действия, один конец которой закреплен в тело зубчатого сектора 7, а другой конец - к неподвижному кронштейну 12. На секторе 8 смонтирован палец 14 для захвата груза, установленный в плоскости, перпендикулярной плоскости перемещения губок. Кроме того, на секторе 8 выполнен ограничительный зуб 15, с помощью которого фиксируется относительное положение секторов 7 и 8.
Схват работает следующим образом.
Приводной щток 3, перемещаясь влево, ув.лекает. шарнирно соединенные с ним поворотные рычаги 5 и 6, которые вызывают поворот коромысла 4 против часовой стрелки, зажимные губки перемещаются навстречу друг другу, а схват закрывается. При этом положение и соотношение длин коромысла 4 и поворотного рычага 5 выбраны таким образом, что при работе схвата оси б и В шарниров поворотных рычагов 5 всегда лежат i. одной прямой, что обеспечивает прямолинейное перемещение зажимных губок 1,Два щарнирных параллелограмма, каждый из которых образован зажимной губкой 1. поворотными рычагами 5 и 6 и общим приводным штоком 3, обеспечивают плоскопараллельное перемещение зажимных губок.
При сближении зажимных губок 1 захватываемая деталь вызывает поворот относительно оси 9 зубчатого сектора 7, который передает крутящий момент пружине 13, которая закручивается относительно своего неподвижного конца, закрепленного на кронштейне 12, и зубчатому сектору 8, вызывая поворот последнего вокруг оси 10. При этом нижний конец сектора 8, изготовленный в виде пальца 14, охватывает деталь в плоскости, перпендикулярной плоскости перемещения губок 1.
Для освобождения детали приводной шток 3 перемещается вправо, увлекая шар.нирно соединенные с ним поворотные рычаги 5 и 6, которые вызывают поворот коромысла 4 по часовой стрелке, при этом зажимные губки 1 раздвигаются.
При отведении зажимной губки 1 от детали под действием пружины 13 сектор 7 занимает исходное положение и, следова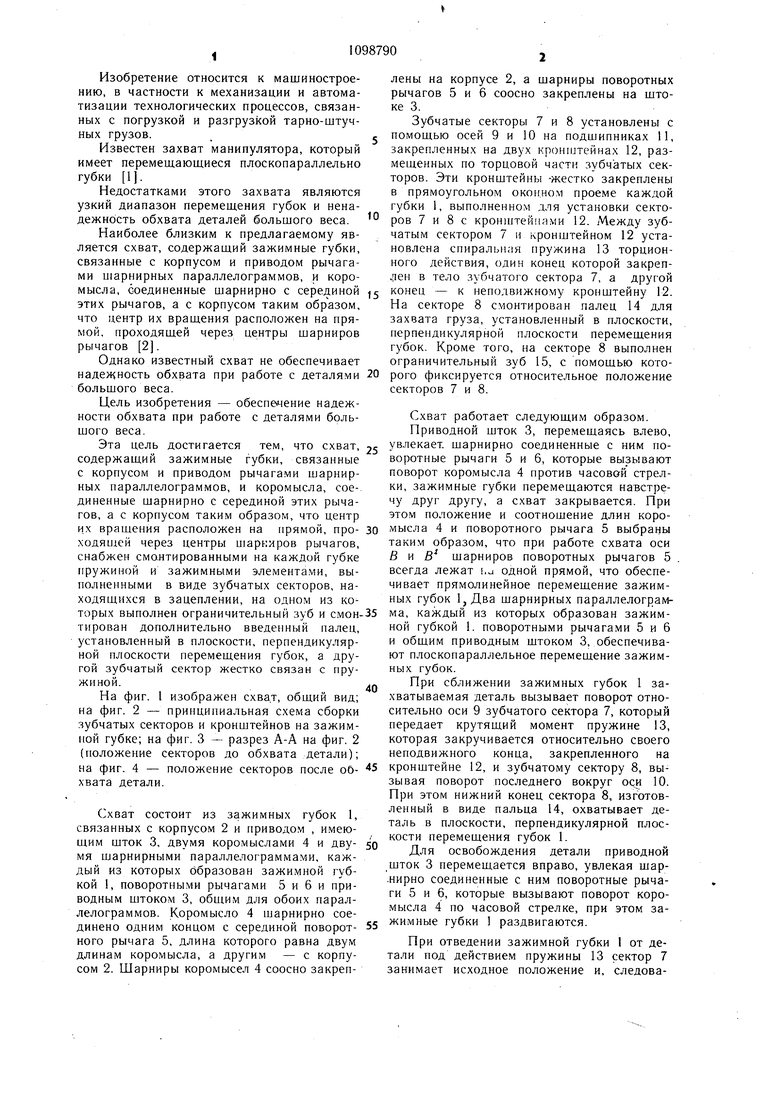
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочно-захватное устройство | 1988 |
|
SU1565681A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1495121A1 |
| Захват | 1988 |
|
SU1668130A1 |
| Захват | 1976 |
|
SU568542A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
СХВАТ, содержащий зажимные губки, связанные с корпусом и приводом рычагами шарнирных параллелограммов, и коромысла, соединенные шарнирно с серединой этих рычагов, а с корпусом таким образом, что центр их вращения расположен на прямой, проходящей через центры шарниров рычагов, отличающийся тем, что, с целью повышения надежности при работе с деталями .большого веса, он снабжен смонтированными на каждой губке пружиной и зажимными элементами, выполненными в виде зубчатых секторов, находящихся в зацеплении, на одном из которых выполнен ограничительный зуб и смонтирован дополнительно введенный палец, установленный в плоскости, перпендикулярной плоскости перемещения губок, а другой зубчатый сектор жестко связан с пружиной. (Л со 00 со J фиг./
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крайнев А | |||
| Ф | |||
| Словарь-справочник по механизмам | |||
| М., «Машиностроение, 1981, с | |||
| Способ составления поездов | 1924 |
|
SU349A1 |
| «О | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захват | 1976 |
|
SU568542A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
