Изобретение относится к грузозахватным устройствам автооператоров и роботов, обслуживающих различные виды технологического оборудования, где требуется подача заготовок и съем деталей преимущественно цилиндрической формы.
Известен охват, содержащий корпус и размещен 1ый в нем механизм сведения захватных рычагов с шарнирными тягами, соединенными через упругую связь со шкивом привода схвата, и губки, выполненные в виде подпружиненных кареток Cl3.
Недостатком данного,схвата являет сложность конструкции, кроме того, при неточном подходе схвата к зажатой в станке детали Ht обеспечивает гарантированный ее зажим из-за перекоса оси пружины и втулки.
Цель изобретения - осуществление гарантированного зажима детали.
Цель достигается тем, что в схвате, содержащем корпус и размещенный в нем механизм сведения захватных рычагов с шарнирными тягами, соединенными через упругую связь со штоком привода схвата, губки, выполненные в виде подпружиненных кареток, механизм сведения захватных рычагов снабжен пластинчатой пружиной, коромыслом и двумя шарнирными серьгами, связывающими коромысло с соответствующими однонаправленными плечами захватных рычагов, противоположно направленные плечи которых соединены шарнирно пластинчатой пружиной в точках, равноудаленных от продольной оси захвата и от осей поворота захватных рычагов.
На фиг. 1 изображен схват в раскрытом положении; на фиг. 2 то же с деталью, зажатой со смещенным центром; на фиг. 3 - сечение А-А на фиг. 1 (упругий элемент в виде пластинчатой пружины ).
Схват содержит корпус 1, захватные рычаги 2 с губками 3, выполненными в виде подпружиненных кареток, привод сведения захватных рычагов в виде пневмогидроцилиндра со штоком 4. Шток 4 шарнирно осью 5 соединен с коромыслом б, которое осями 7 шарнирно соединено с серьгами 8. Серьги 8 осями 9 шарнирно соединены с однонаправленными плечами двухплечих захватных рычагов 2. Захватные рычаги 2 на осях 10 укреплены в корпусе 1, а их противоположно направленные плечи на осях 11 соединены посредством упругого элемента 12 двухстороннего действия в точках, равноудаленных от продольной оси 13 схвата и от осей 10 поворота захватных рычагов. Упругий элемент 12 может быть выполнен, например, в виде пластинчатой пружины с волнообразными перегибами в средней части и с отверстиями 14 под оси 11
по концам со строго установленным межосеБым расстоянием.
Схват работает следующим образом.
При подходе схвата к детали 15, закрепленной в патроне станка, в случае точного совмещения оси детали 15 с осью 13 схвата (фиг. 1) шток 4 находится во втянутом положении, при этом рычаги 2 с губками 3 разведены относительно оси 13 схвата благодаря упругому элементу 12, находящемуся в ненагруженном свободном состоянии и выполняющему в этом случае роль тяги. Для зажатия детали 15 подается давление в привод, шток 4 при этом выдвигается и усилие передается через ось 5, коромысло 6, оси 7 и серьги 8 на однонаправленные плечи рычагов 2 через оси 9. Рычаги 2, поворачиваясь на осях 10, зажимают деталь губками 3. После этого деталь 15 освобождается из станка, переносится к месту выгрузки, давление подается в противоположную . полость привода схвата, шток 4 которого возвращается в исходное положение, и происходит освобождение детали 15 в порядке, обратном зажатию.
При неточном подходе схвата к детали 15 (на фиг. 2 ось детали 15 слева от оси схвата) работа происходит следующим образом. При выдвижении штока 4 оба захватных рычага 2 с губками 3 перемещаются навстречу друг другу до остановки одной из губок 3 (в данном случае левой) у поверхности схватываемой детали 15. Другой рычаг 2 (правый) продолжает перемещаться за счет поворота коромысла 6 вокруг ОСИ- 5,. серьги 8 вокруг осей 7 и 9. Расстояние между осями 11 при этом уменьшается и упругий элемент 12 сжимается. Если бы ось схватываемой детали находилась справа от оси схвата и раньше остановился правый рычаг 2, а левый продол жал двигаться, то расстояние между осЯми 11 увеличилось и упругий элемент 12 растянулся бы (при таком же закреплении упругого элемента 12 Поворот Е ь1чага 2 продолжается до тех пор, пока его каретка не достигнет поверхности детали 15. Подпружиненные губки 3 самоустанавливаются по детали 15. После этого деталь 15 освобождается из станка и переносится к месту выгрузки. При транспортировке ось детали 15 автоматически совмещается с осью схвата за счет тЪго,что упругий элемент 12,стремясь восстановить свою первоначальную длину (в ненагруженном свободном состоянии ), поворачивает рь1чаги 2 на осях 10, т.е. деталь 15 на следующей позиции может быть установлена точно.
Тем самым гарантируется зажим детали при поврежденни отдельных узлов схвата.
jbA.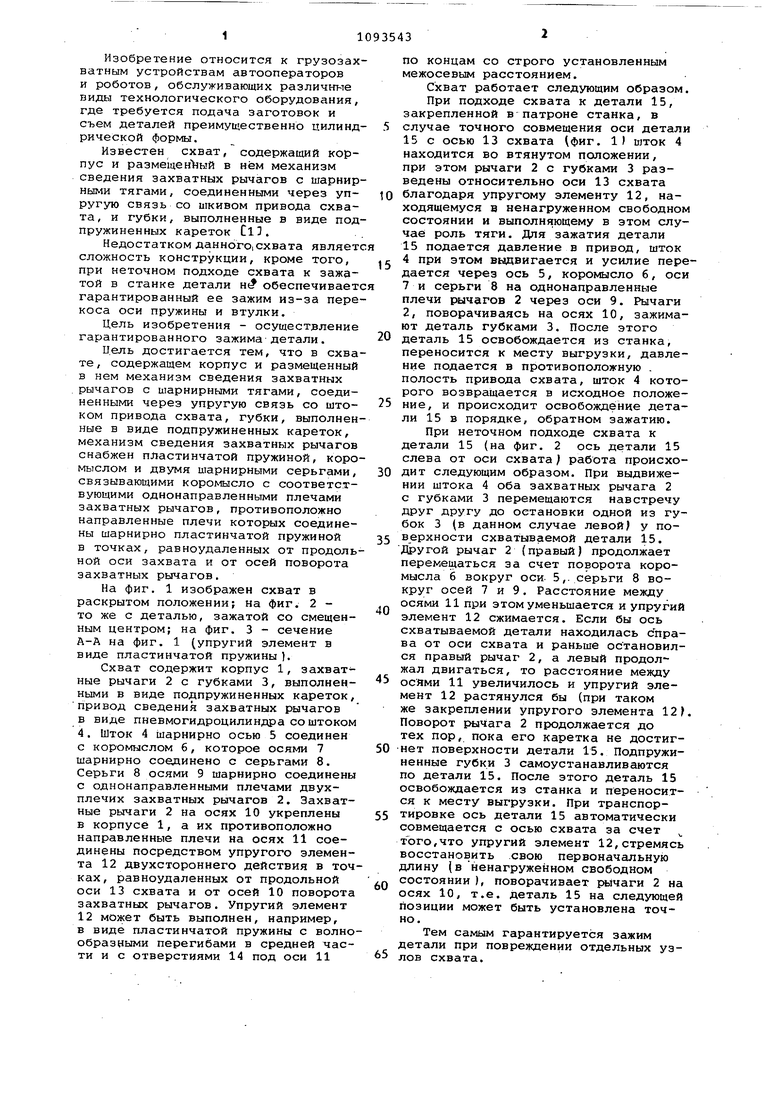
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Захватное устройство | 1987 |
|
SU1473944A1 |
| Схват робота | 1983 |
|
SU1117205A1 |
| Схват | 1980 |
|
SU960009A1 |

СХВАТ, содержащий корпус и размещенный в нем механизм сведения захватных рычагов с шарнирными тягами, соединенными через упругую связь со штоком привода схвата, губки, выполненные в виде подпрулсиненных кареток, отличающийс я тем, что, с целью осуществления гарантированного зажима детали, механизм сведения захватных рычагов снабжен пластинчатой пружиной, коромыслом и двумя шарнирными серьгами, связывающими коромысло с соответствующими однонаправленными плечами захватных рычагов, противоположно направленные плечи котор;ых соединены щарнирно пластинчатой пружиной в точках, равноудаленных от продольной оси захвата и от осей поворота захватных рычагов..
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1978 |
|
SU722758A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
